Robot JAKA
Questa sezione della documentazione fornisce una panoramica del funzionamento tipico dei robot JAKA che utilizzano il software RoboDK per inviare un programma all'applicazione controller del robot JAKA.
Le caratteristiche disponibili includono:
1.Controllare il robot in tempo reale utilizzando il driver e "Esegui sul robot".
2.Inviare un programma all'applicazione JAKA Zu utilizzando il post-processore e "Invia programma al robot" o caricare manualmente il programma in JAKA Zu importando il file .zip generato da RoboDK.
Inviare un programma al controller JAKA tramite RoboDK
Può inviare un programma al suo controller robot JAKA con pochi clic da una simulazione RoboDK.
Per caricare un programma da RoboDK in JAKA Zu, deve seguire questi passaggi:
1.Avviare l'applicazione JAKA Zu e collegarsi al robot nell'applicazione JAKA Zu.
2.Accendere e abilitare il robot JAKA Zu.
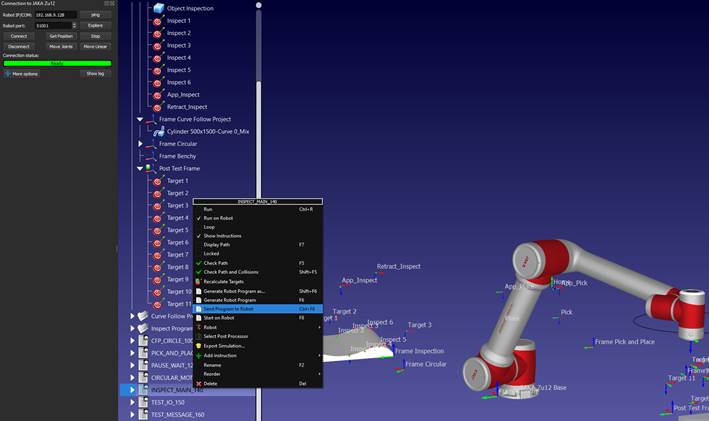
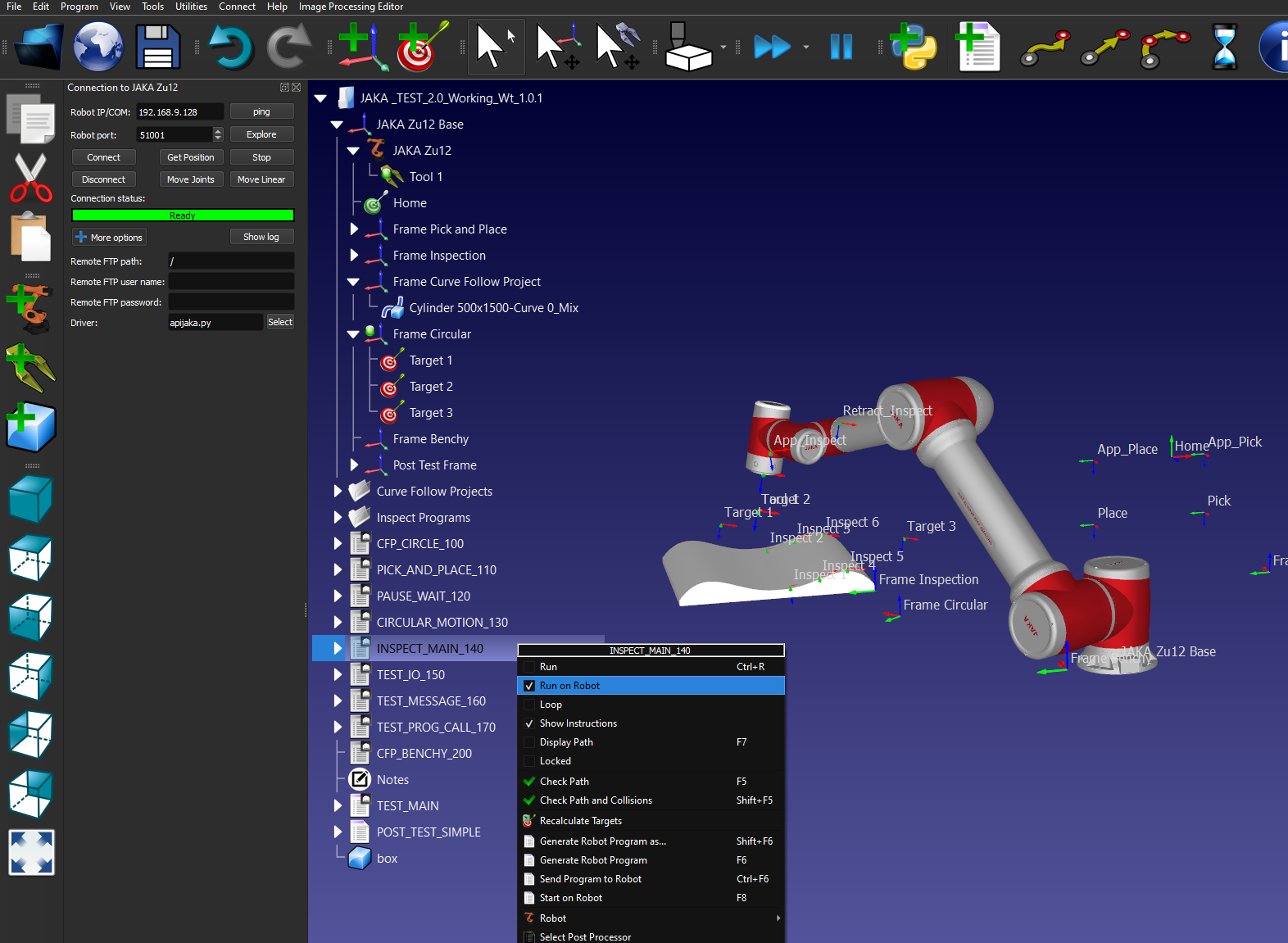
3.Nella barra degli strumenti RoboDK, selezioni Connect➔ Connect Robot.
Alla voce Altre opzioni, si assicuri di aver selezionato il driver JAKA: apijaka.py.
4.Utilizzi l'IP e la porta del robot per collegarsi al robot in RoboDK.
5.Fare clic con il pulsante destro del mouse sul programma che si desidera inviare a JAKA Zu e selezionare Invia programma al robot.
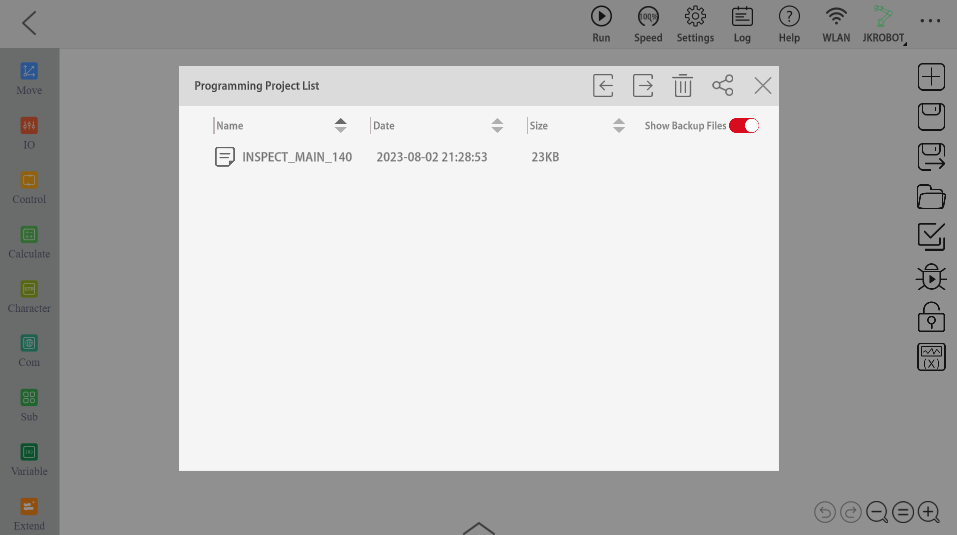
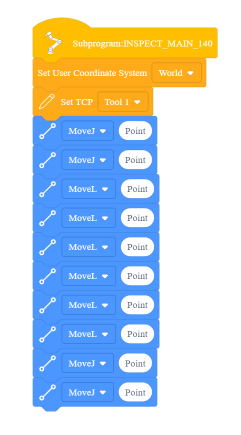
6.In JAKA Zu, si rechi nella scheda Controllo programmazione.
7.Apra l'Elenco dei progetti di programmazione cliccando sull'icona della cartella e selezioni il programma importato.
Importazione manuale di un programma nel controller JAKA
Può importare manualmente i programmi robotici generati da RoboDK nel suo controller robot JAKA.
Per importare un programma RoboDK in JAKA Zu, deve seguire la seguente procedura:
1.Avviare l'applicazione JAKA Zu e collegarsi al robot nell'applicazione JAKA Zu.
2.Accendere e abilitare il robot JAKA Zu.
3.Clicchi con il tasto destro del mouse sul programma che desidera importare in JAKA Zu e selezioni Generate Robot Program as....
4.Selezioni la posizione in cui desidera salvare il programma.
5.In JAKA Zu, si rechi nella scheda Controllo programmazione.
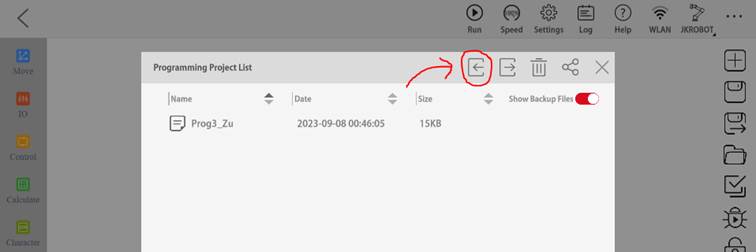
6.Apra l'Elenco dei progetti di programmazione cliccando sull'icona della cartella e clicchi sull'icona di importazione.
7.Individui e selezioni il file .zip generato da RoboDK.
8.Apra l'Elenco dei progetti di programmazione e selezioni il programma importato.
Sostituisca manualmente il piano di riferimento del robot
I passi seguenti mostrano come configurare manualmente il piano di riferimento del robot nell'applicazione JAKA Zu.
Per prima cosa, deve creare una cornice JAKA Zu personalizzata:
1.In JAKA Zu, vada su Impostazioni➔ Impostazioni operative➔ Sistema di coordinate utente.
2.Clicchi sul pulsante di modifica per impostare i valori X, Y, Z, RX, RY e RZ per una cornice personalizzata.
3.Selezionare conferma per salvare la cornice in JAKA Zu.
Quindi, deve sostituire la cornice importata con la cornice JAKA Zu:
4.Segua i passi elencati in Inviare un programma a JAKA Zu.
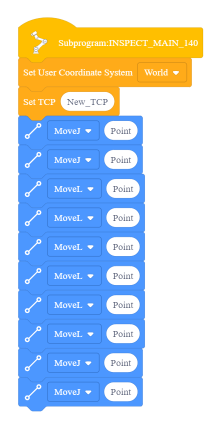
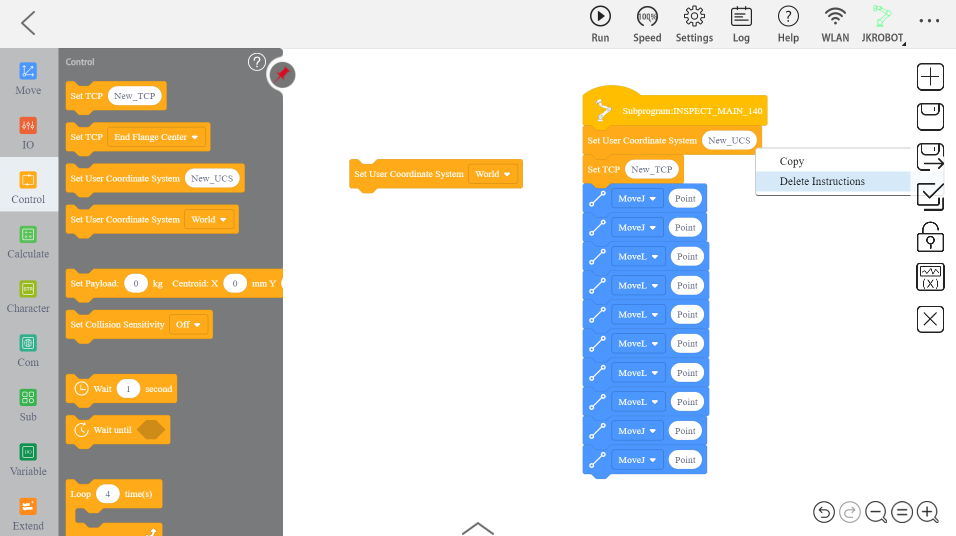
5.Apra la scheda Controllo nella barra laterale e individui il riquadro "Imposta sistema di coordinate utente" contenente la casella a discesa.
6.Rimuova la piastrella "New_UCS" che è stata importata automaticamente facendo clic con il pulsante destro del mouse e selezionando Elimina.
7.Sostituisca la piastrella rimossa con la piastrella "Imposta sistema di coordinate utente" e selezioni la cornice personalizzata dal menu a tendina.
Sostituzione manuale dell'utensile del robot (TCP)
Può anche configurare manualmente il TCP attraverso l'applicazione JAKA Zu. I passi seguenti descrivono questo processo.
Per prima cosa, deve creare uno strumento JAKA Zu personalizzato:
1.In JAKA Zu, vada su Impostazioni➔ Impostazioni operative➔ Impostazioni TCP.
2.Clicchi sul pulsante di modifica per impostare i valori X, Y, Z, RX, RY e RZ per il TCP personalizzato.
3.Selezioni la voce Conferma per salvare lo strumento in JAKA Zu.
Quindi, deve sostituire lo strumento importato con lo strumento JAKA Zu:
4.Segua i passi elencati in Inviare un programma a JAKA Zu.
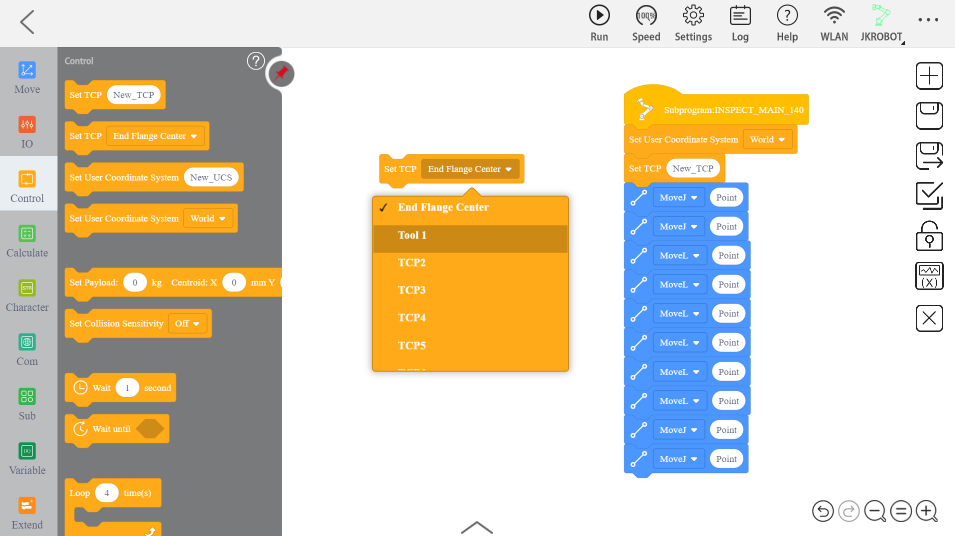
5.Apra la scheda Controllo nella barra laterale e individui il riquadro "Imposta TCP" contenente la casella a discesa.
6.Rimuova la piastrella "New_TCP" che è stata importata automaticamente facendo clic con il pulsante destro del mouse e selezionando Elimina.
7.Sostituisca la piastrella rimossa con la piastrella a discesa "Imposta TCP".
8.Selezioni lo strumento desiderato dal menu a discesa.
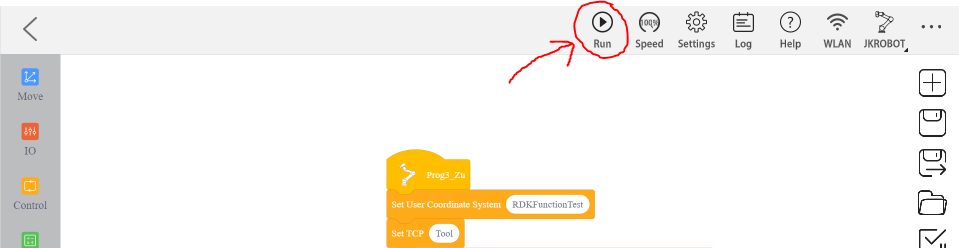
Avviare un programma robotico
Segua questi passaggi per avviare un programma robotico su un robot JAKA.
1.Segua i passi elencati in Inviare un programma a JAKA Zu.
2.Nella barra degli strumenti superiore, selezioni "Esegui".
Driver RoboDK per JAKA
È possibile stabilire una connessione tra RoboDK e il robot JAKA per muovere il robot automaticamente da un PC collegato che utilizza RoboDK. Ciò consente di utilizzare l'opzione RoboDK Run on robot per la programmazione e il debug online. La connessione può essere stabilita attraverso una connessione Ethernet standard (TCP/IP).
Segua questi passaggi per impostare il driver RoboDK per la programmazione online JAKA:
1.Avviare l'applicazione JAKA Zu e collegarsi al robot nell'applicazione JAKA Zu.
2.Accendere e abilitare il robot JAKA Zu.
3.Nella barra degli strumenti RoboDK, selezioni Connetti➔ Connetti Robot.
4.Sotto "Altre opzioni", selezioni il driver JAKA: apijaka.py.
5.Utilizzi l'IP e la porta del robot per collegarsi al robot in RoboDK.
6.Ora può spostare il robot JAKA direttamente da RoboDK.
a.Per spostare il robot verso un bersaglio in RoboDK, faccia doppio clic sul bersaglio nell'albero delle stazioni e selezioni i pulsanti "Sposta i giunti" o "Sposta lineare" nell'interfaccia di connessione per eseguire uno spostamento dei giunti o lineare verso il bersaglio.
b.Per eseguire un programma sul robot utilizzando il driver, faccia clic con il pulsante destro del mouse sul programma desiderato e selezioni l'opzione "Esegui sul robot". Poi, faccia doppio clic sul programma per eseguirlo sul robot.
Recupero dell'indirizzo IP dal simulatore virtuale JAKA
Per recuperare un indirizzo IP dal simulatore virtuale, deve decodificare la stringa Base64 che è richiesta nel campo Indirizzo robot, mostrato di seguito:
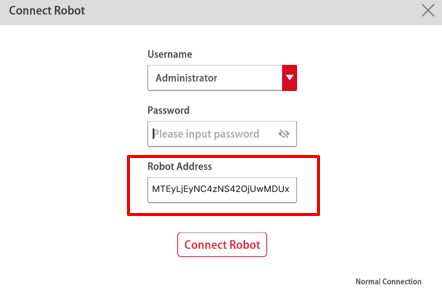
Utilizzando strumenti come https://www.base64decode.net/, può recuperare l'IP e la Porta del robot dall'indirizzo del robot.


In questo esempio, l'IP è 112.124.35.6 e la porta è 50051.