Eseguire un programma sul controller KEBA
Una volta che la sua simulazione RoboDK è pronta, può generare un programma offline che può essere eseguito dal controller del robot KEBA (file KAIRO).
Segua questi passaggi per generare un programma per il suo controllore (file KAIRO) dalla simulazione del robot:
1.Clicchi con il tasto destro del mouse su un programma.
2.Selezioni Generate robot program F6. Quindi trasferisca manualmente i file via FTP al progetto desiderato.
In alternativa, selezioni il programma Generate robot Ctrl+F6 dopo aver impostato SFTP.
3.Nella scheda progetto del pendant di apprendimento, prema Aggiorna.
4.Carica il programma e poi carica il file principale

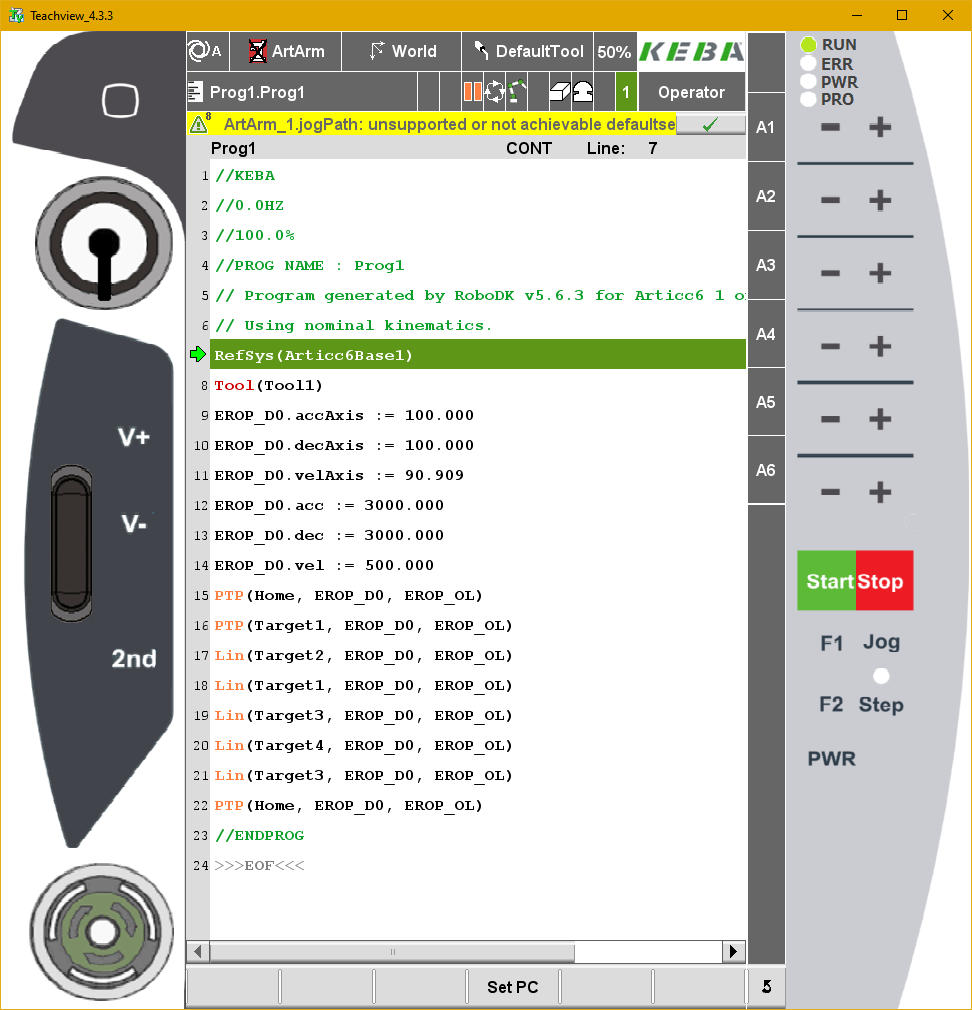
Il programma verrà visualizzato in un editor di testo. Può trovare maggiori informazioni su come generare programmi da RoboDK nella sezione Programma robot della documentazione.