Controllori KEBA
Può programmare i controllori KEBA da RoboDK con due metodi diversi: Può generare programmi robotici offline utilizzando il post-processore KEBA KAIRO o il driver RoboDK.
Utilizzando il post processor KAIRO di KEBA, può ottenere file KAIRO che possono essere caricati sul controller KEBA utilizzando RoboDK. Questo si ottiene utilizzando il post processor predefinito utilizzato per i robot KEBA. Inoltre, può trasferire direttamente i file del programma di script utilizzando FTP o un'unità USB.
Inoltre, utilizzando il driver per i robot KEBA, può eseguire i programmi sul robot da RoboDK se il robot è collegato al computer.
Recupera l'IP del controller KEBA
È necessario l'IP del suo controller KEBA per trasferire o eseguire automaticamente i programmi da RoboDK. Può verificare se l'IP del suo robot è corretto inserendo l'IP in un browser per accedere all'interfaccia web
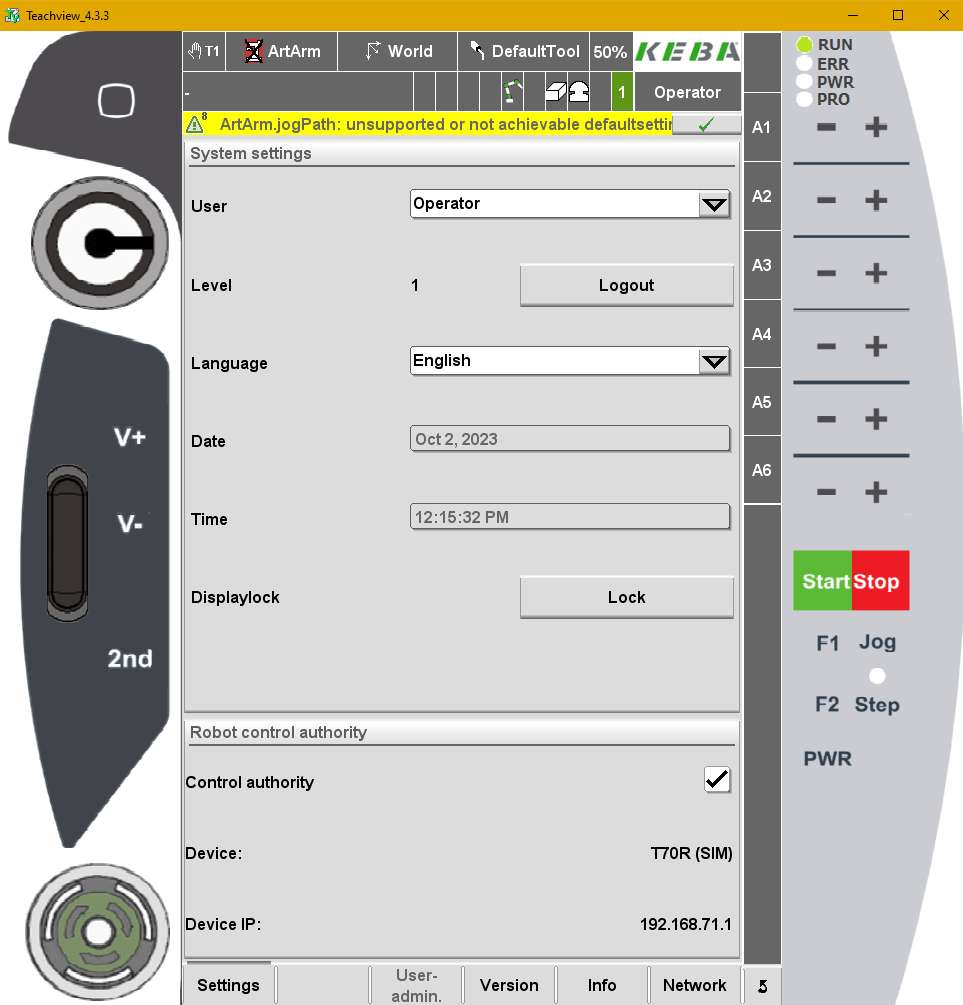
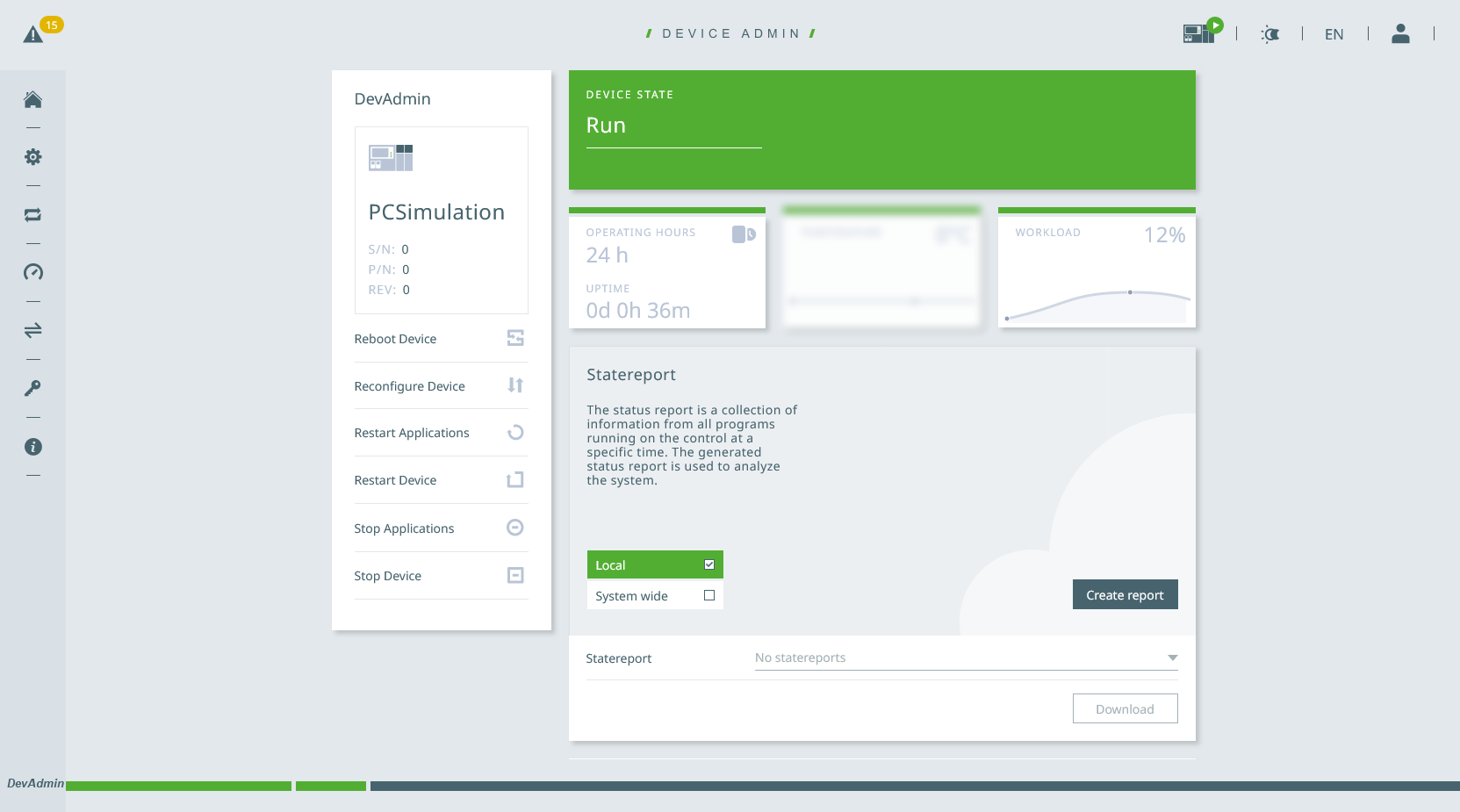
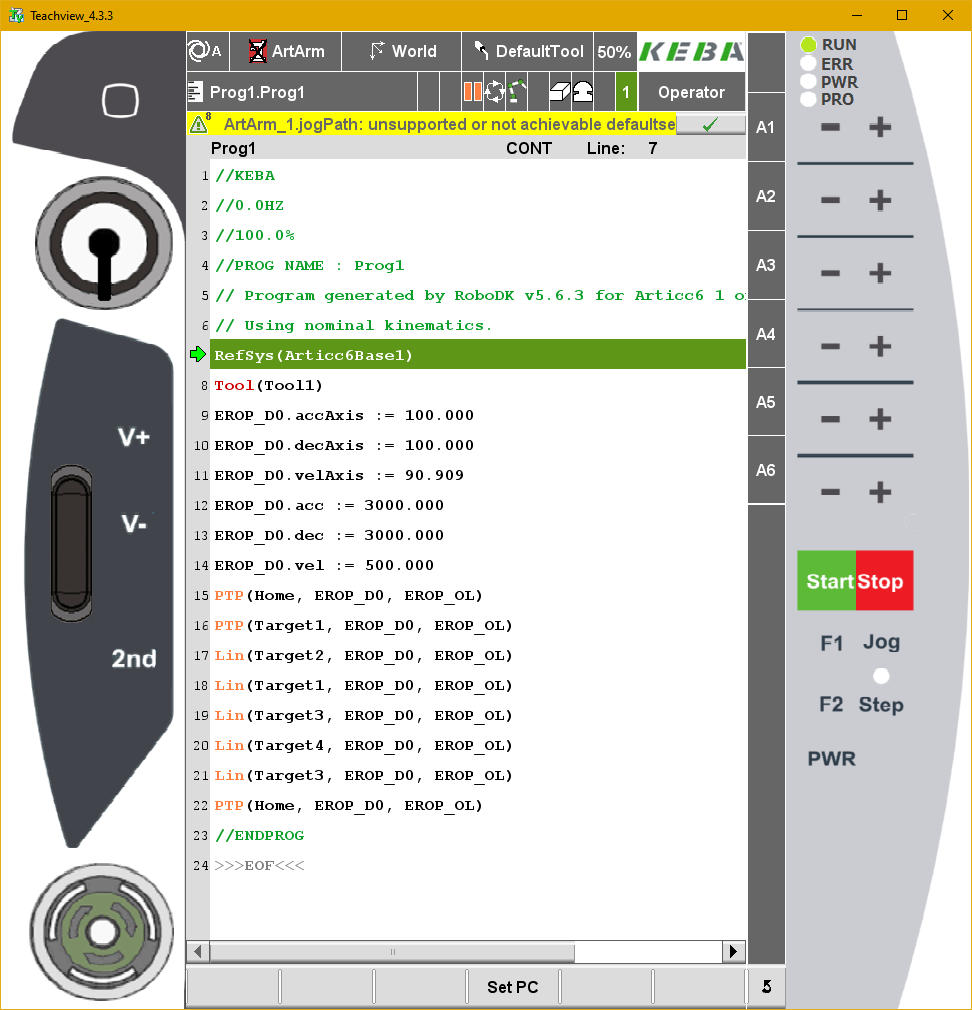
Per ottenere l'IP può accedere alla finestra di servizio sul suo pendant didattico e selezionare la scheda informazioni.
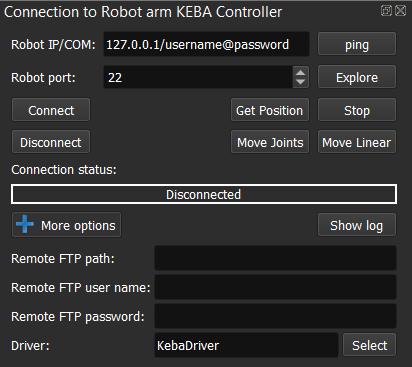
Il formato dell'indirizzo IP inserito in RoboDK deve contenere il nome utente e la password e deve seguire questo formato: .127.0.0.1/username@password
Le immagini seguenti mostrano come recuperare l'IP del controllore dal teach pendant del controllore.


Si assicuri di configurare correttamente una connessione di rete se non riesce a vedere l'interfaccia web del robot, come mostrato nell'immagine seguente.
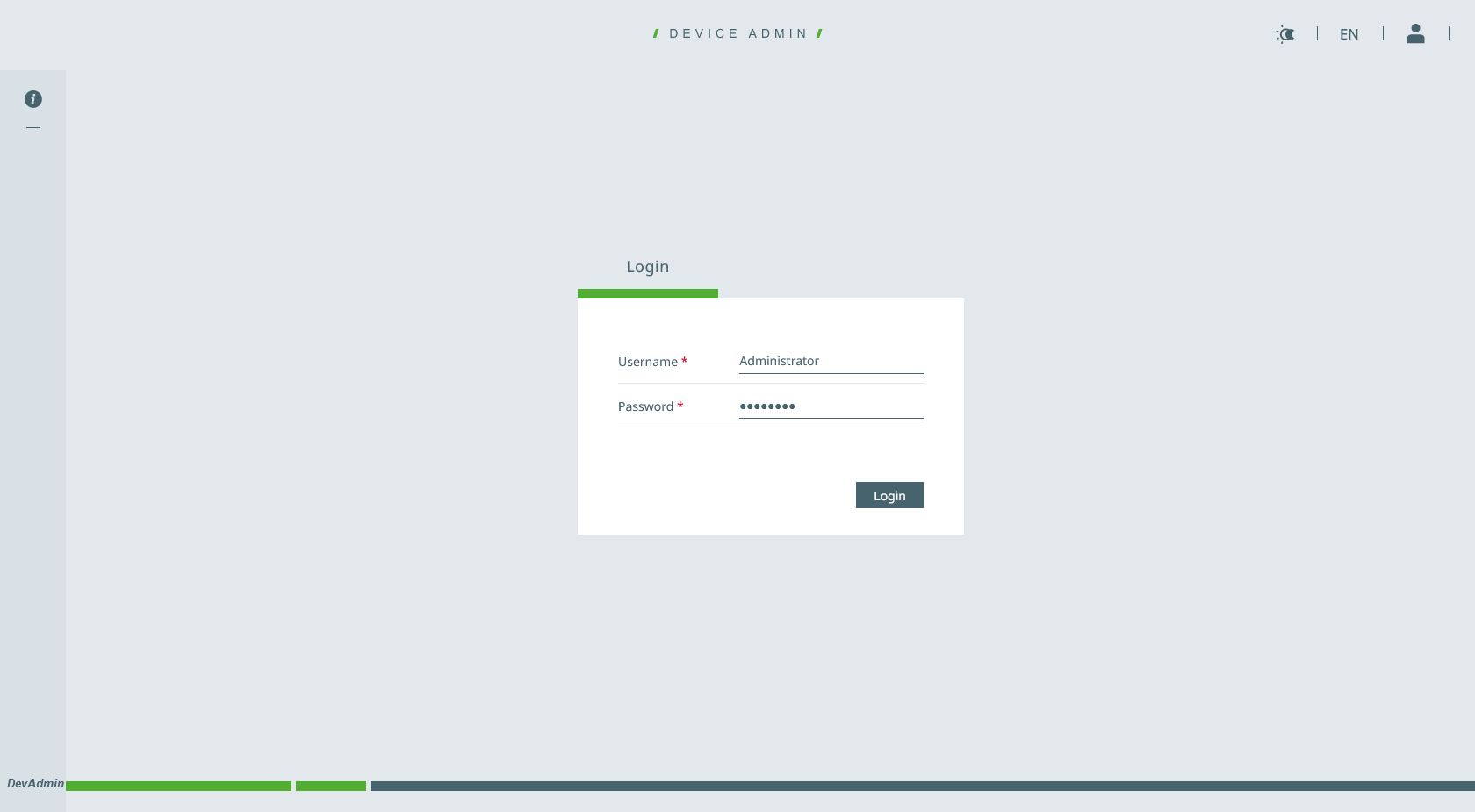
Avrà anche bisogno del nome utente e della password utilizzati per accedere all'interfaccia web del robot; può verificare che siano validi accedendo tramite l'interfaccia web.
Eseguire un programma sul controller KEBA
Una volta che la sua simulazione RoboDK è pronta, può generare un programma offline che può essere eseguito dal controller del robot KEBA (file KAIRO).
Segua questi passaggi per generare un programma per il suo controllore (file KAIRO) dalla simulazione del robot:
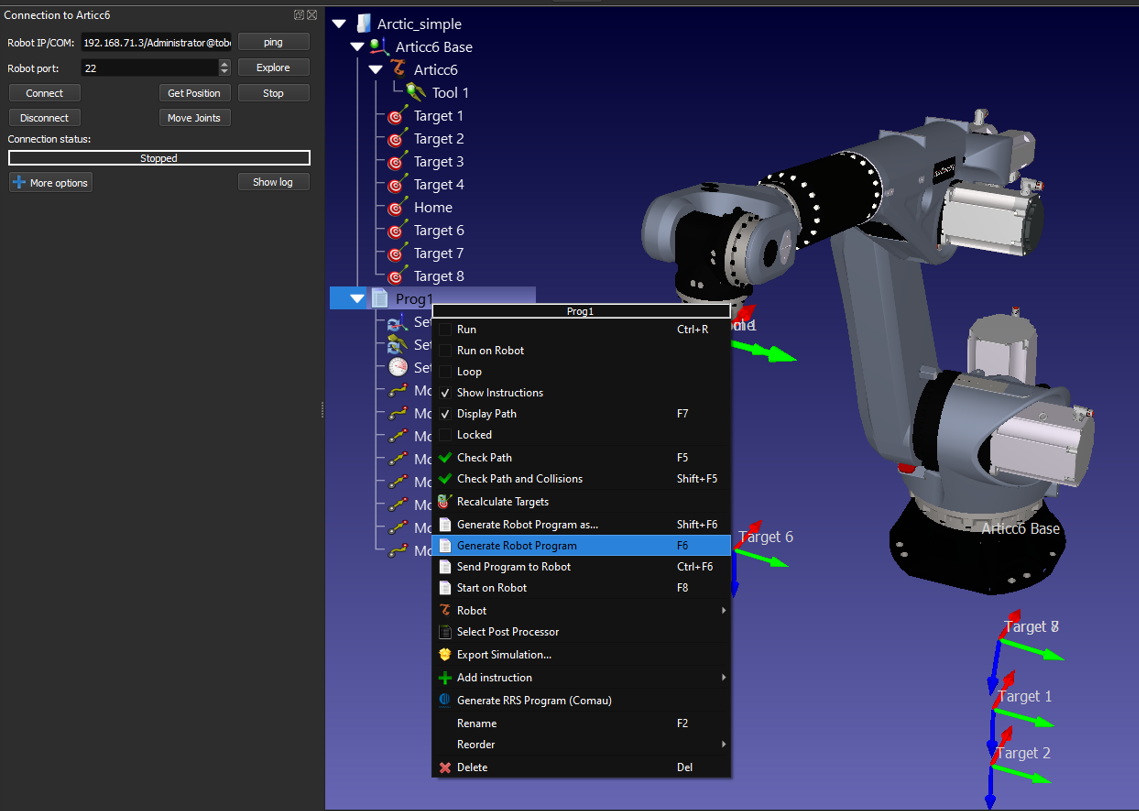
1.Clicchi con il tasto destro del mouse su un programma.
2.Selezioni Generate robot program F6. Quindi trasferisca manualmente i file via FTP al progetto desiderato.
In alternativa, selezioni il programma Generate robot Ctrl+F6 dopo aver impostato SFTP.
3.Nella scheda progetto del pendant di apprendimento, prema Aggiorna.
4.Carica il programma e poi carica il file principale

Il programma verrà visualizzato in un editor di testo. Può trovare maggiori informazioni su come generare programmi da RoboDK nella sezione Programma robot della documentazione.
Eseguire il programma da RoboDK
I driver per robot offrono un'alternativa alla Programmazione offline (in cui un programma viene generato, poi trasferito al robot ed eseguito). Può eseguire una simulazione da RoboDK direttamente sul robot (Programmazione online). Maggiori informazioni sui driver sono disponibili nella sezione Driver del robot.
Segua questi passaggi per collegarsi al robot da RoboDK:
1.Clicchi con il tasto destro del mouse sul robot in RoboDK.
2.Selezionare: 
3.Inserisca l'IP del robot.
4.Selezionare Connetti.
Dovrebbe apparire un messaggio verde che indica Pronto se la connessione è riuscita. In caso contrario, si assicuri di avere l'IP, il nome utente e la password corretti. Inoltre, si assicuri di formattare correttamente l'indirizzo IP in RoboDK come indicato nelle sezioni precedenti (127.0.0.1/username@password).
Il robot può essere spostato selezionando Ottieni giunti del robot dal menu delle connessioni, facendo un jog con il robot e cliccando su Sposta giunti per spostare il robot dal menu delle connessioni.
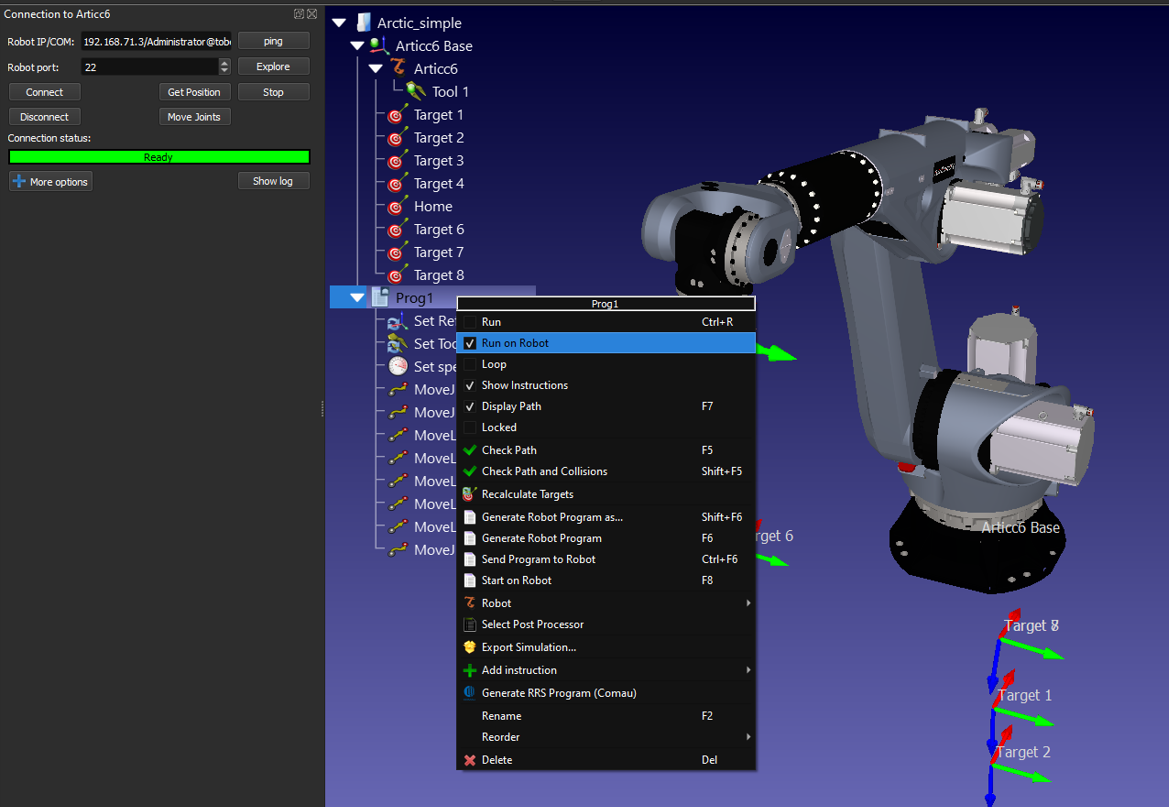
Per eseguire i programmi dal PC direttamente sul suo robot, deve attivare l'opzione Esegui sul robot sui suoi programmi. I passi seguenti descrivono come attivare l'opzione Esegui sul robot:
a.Clicchi con il tasto destro del mouse sul programma (Print3D in questo esempio).
b.Selezionare Esegui sul robot
c.Clicchi due volte sul programma per avviarlo (oppure clicchi con il tasto destro del mouse e selezioni Esegui).
Questo metodo di programmazione dei robot è utile per il debug, ma per distribuire un programma robotico è meglio generare il programma offline, come indicato nella sezione precedente.
Una volta selezionata l'opzione Esegui sul robot, si collegherà al robot reale ogni volta che si fa doppio clic su un programma (o si fa clic con il pulsante destro del mouse, quindi si seleziona Esegui).
Queste operazioni sono disponibili anche nell'API RoboDK, che consente di integrare la programmazione dei robot con altre applicazioni. L'API è disponibile in Python e C# e in altri linguaggi di programmazione.
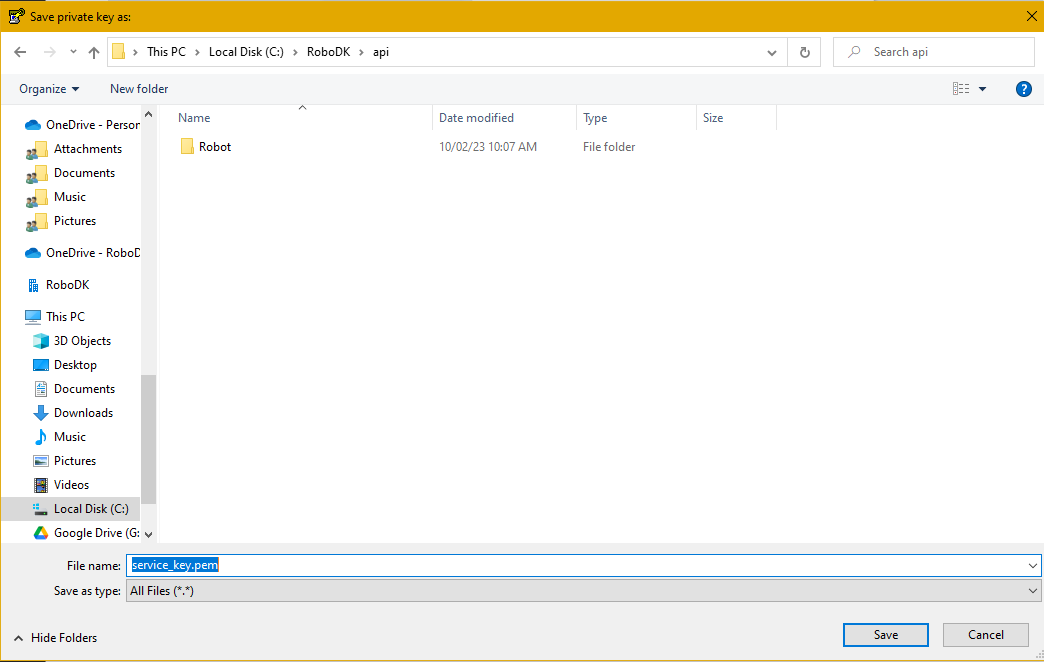
Utilizzo del file PPK per SFTP
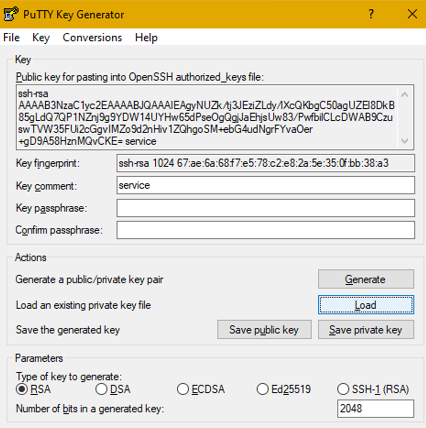
Invece di utilizzare il nome utente e la password per trasferire i file, può anche utilizzare un file chiave. Per farlo, dovrà convertire il file PPK fornito da KEBA con il suo robot in un file PEM. Questo può essere fatto con puttygen, un'utility che viene installata con putty.
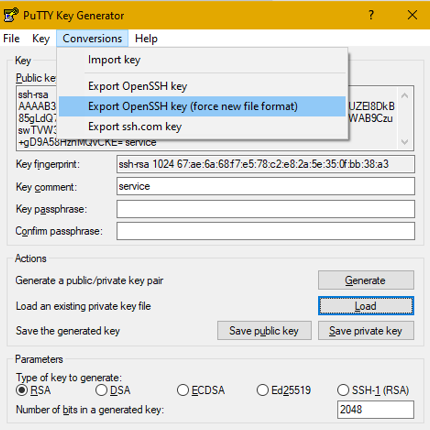
In puttygen, carichi il file chiave selezionando Carica. Poi clicchi sul menu a tendina Conversioni e selezioni Esporta chiave SSH aperta (forza nuovo formato di file).
Assuma il nome service_key.pem e salvi il file nella cartella RoboDK API, che per impostazione predefinita si trova in C:\RoboDK\api.