Ottieni i giunti robot
I prossimi passaggi permettono di ottenere i giunti robot:
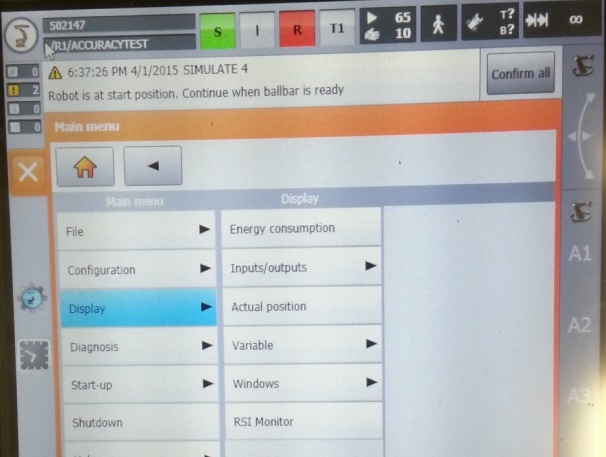
1.Seleziona MENU➔Display➔Actual position
2.Selezione la modalità Joints e utilizza la colonna di sinistra per ottenere i giunti del robot
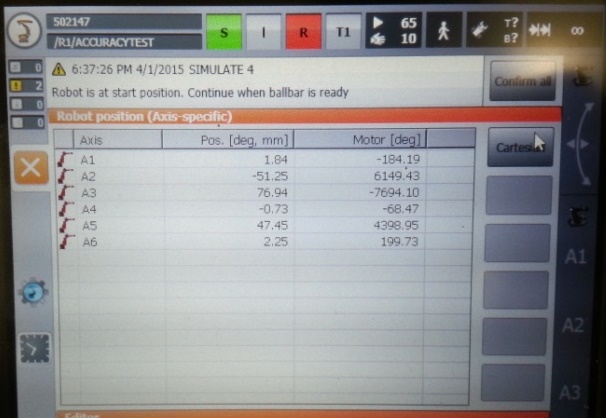
Suggerimento: È possibile ottenere i giunti del robot in maniera più accurata (5 decimali) monitorando la variabile $AXIS_ACT o semplicemente utilizzando i driver robot di RoboDK e selezionando il pulsante Ottieni giunti robot