Esegua un programma sul controller Mecademic
Una volta che la sua simulazione RoboDK è pronta, può generare un programma offline che può essere eseguito dal controller robot Mecademic (file di script). Può anche generare un file PY che eseguirà il programma sul controller del robot da un computer remoto.
Segua questi passaggi per generare un programma offline (uno script o un file PY) dalla simulazione del robot:
1.Clicchi con il tasto destro del mouse su un programma (Prog1 in questo esempio).
2.Selezionare Genera programma robot F6
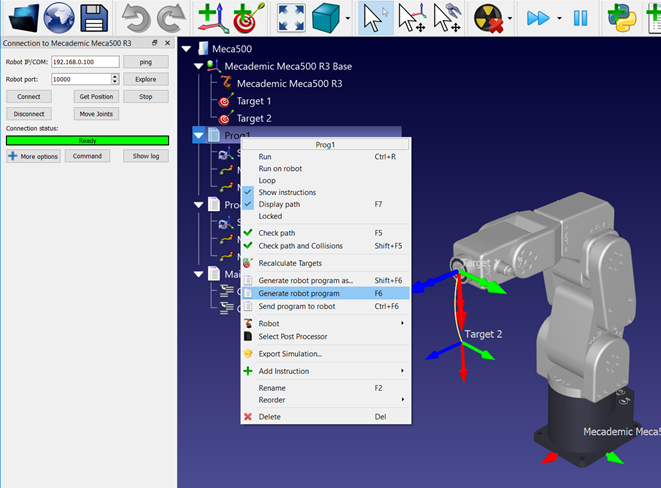
Il programma verrà visualizzato in un editor di testo (questo comportamento può essere modificato nel menu: Strumenti➔ Opzioni➔ Programma).
Come caricare un file di script
Una volta ottenuto un file di programma/script, può eseguire il programma o caricarlo sul controller utilizzando l'interfaccia web. Segua questi passaggi per eseguire il programma utilizzando l'interfaccia web di Mecademic:
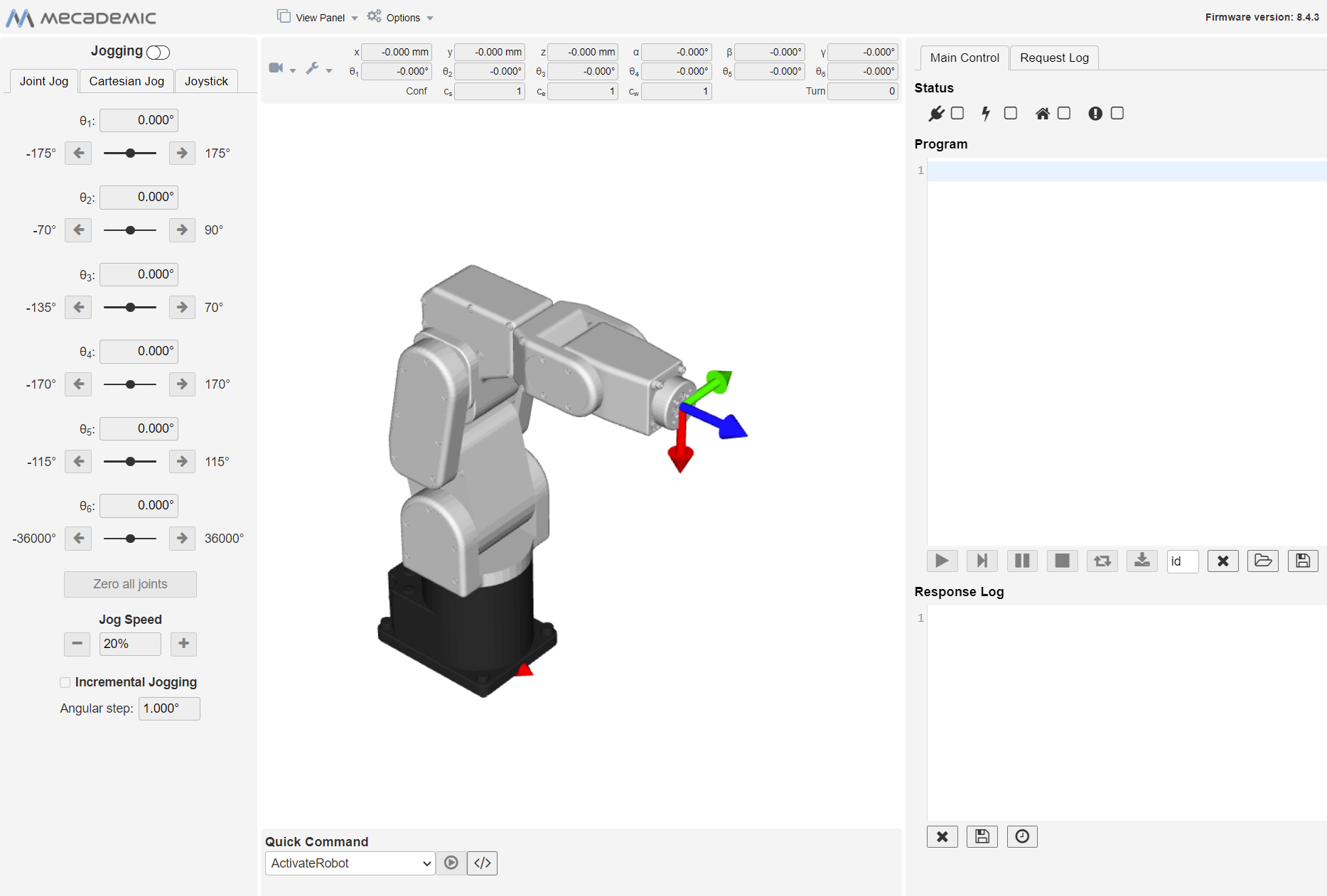
1.Apra l'interfaccia web di Mecademic sul suo browser (digiti l'indirizzo IP del robot).
2.Copia e incolla il contenuto dello script nell'editor del programma.
3.Nella barra di stato, Colleghi, attivi e metta a casa il suo robot.
4.Clicchi sul pulsante play per eseguire il programma.
5.Clicchi sul pulsante Salva per caricare il programma sul robot.
Come eseguire un file PY
Può generare un file Python che si connette automaticamente al robot Mecademic utilizzando l'interfaccia TCP/IP di Mecademic ed esegue il programma in remoto.
Deve selezionare il post processor chiamato Mecademic Python. I passi seguenti riassumono la procedura per eseguire un file PY su Mecademic.
1.Clicchi con il tasto destro del mouse sul programma e selezioni Post Processor.
2.Seleziona Mecademic Python
3.Clicchi con il tasto destro del mouse sul programma e selezioni Genera programma robot (F6).
4.Salvi il file PY generato su disco.
5.Apra ed esegua il file PY nel suo IDE o lo esegua direttamente dal suo ambiente Python.