Mecademico
Può programmare i robot Mecademic con tre metodi diversi: utilizzando i file di script Mecademic che vengono eseguiti sul controller Mecademic, utilizzando i file PY che vengono eseguiti esternamente o utilizzando il driver RoboDK.
1.File di script: può generare script che possono essere caricati sul controller Mecademic utilizzando RoboDK. Questo avviene utilizzando il post processor predefinito utilizzato per i robot Mecademic. Può copiare direttamente i programmi di script utilizzando l'interfaccia web di Mecademic.
2.File PY: Può generare un file Python che si connette automaticamente al robot Mecademic utilizzando l'interfaccia TCP di Mecademic ed esegue il programma in remoto. Deve selezionare il post processor chiamato Mecademic Python.
3.Programmazione online: RoboDK può caricare il suo programma come programma offline (fino a 500) nella memoria del robot. Questi programmi offline possono essere richiamati da qualsiasi altro metodo.
Con RoboDK può generare programmi offline, file di script e file PY che possono essere eseguiti da un robot Mecademic. Inoltre, è possibile eseguire i programmi sul robot da RoboDK, se il robot è collegato al computer.
Recupera l'IP del robot Mecademic
Ha bisogno dell'IP del suo robot Mecademic per eseguire o trasferire programmi da RoboDK. I robot Mecademic utilizzano l'IP 192.168.0.100 per impostazione predefinita. Può verificare se l'IP del suo robot è corretto inserendo l'IP in un browser per accedere all'interfaccia web
Si assicuri di impostare correttamente una connessione di rete se non riesce a vedere l'interfaccia web del robot, come mostrato nell'immagine seguente.
Esegua un programma sul controller Mecademic
Una volta che la sua simulazione RoboDK è pronta, può generare un programma offline che può essere eseguito dal controller robot Mecademic (file di script). Può anche generare un file PY che eseguirà il programma sul controller del robot da un computer remoto.
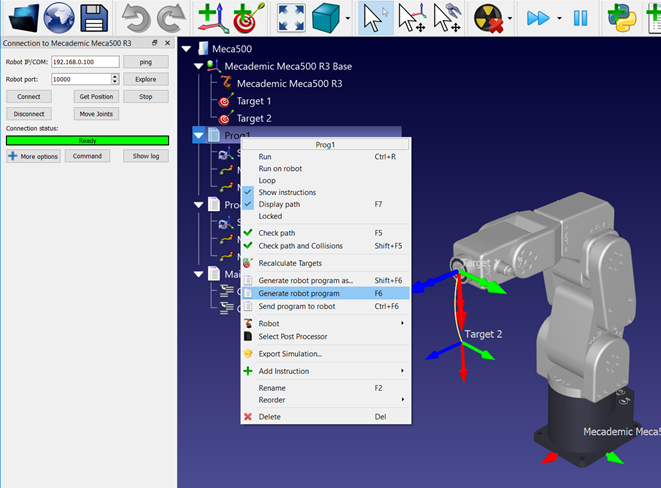
Segua questi passaggi per generare un programma offline (uno script o un file PY) dalla simulazione del robot:
1.Clicchi con il tasto destro del mouse su un programma (Prog1 in questo esempio).
2.Selezionare Genera programma robot F6
Il programma verrà visualizzato in un editor di testo (questo comportamento può essere modificato nel menu: Strumenti➔ Opzioni➔ Programma).
Come caricare un file di script
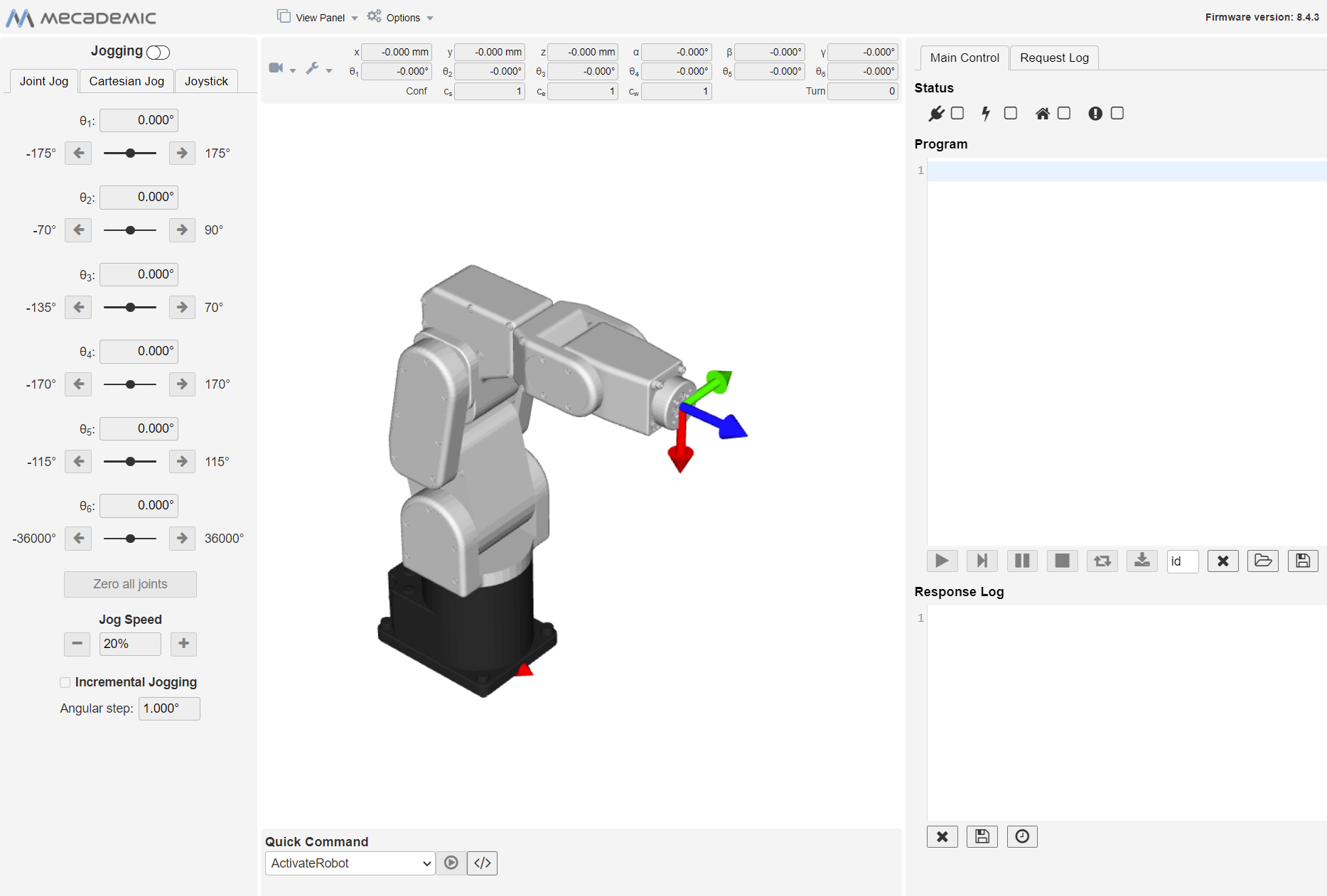
Una volta ottenuto un file di programma/script, può eseguire il programma o caricarlo sul controller utilizzando l'interfaccia web. Segua questi passaggi per eseguire il programma utilizzando l'interfaccia web di Mecademic:
1.Apra l'interfaccia web di Mecademic sul suo browser (digiti l'indirizzo IP del robot).
2.Copia e incolla il contenuto dello script nell'editor del programma.
3.Nella barra di stato, Colleghi, attivi e metta a casa il suo robot.
4.Clicchi sul pulsante play per eseguire il programma.
5.Clicchi sul pulsante Salva per caricare il programma sul robot.
Come eseguire un file PY
Può generare un file Python che si connette automaticamente al robot Mecademic utilizzando l'interfaccia TCP/IP di Mecademic ed esegue il programma in remoto.
Deve selezionare il post processor chiamato Mecademic Python. I passi seguenti riassumono la procedura per eseguire un file PY su Mecademic.
1.Clicchi con il tasto destro del mouse sul programma e selezioni Post Processor.
2.Seleziona Mecademic Python
3.Clicchi con il tasto destro del mouse sul programma e selezioni Genera programma robot (F6).
4.Salvi il file PY generato su disco.
5.Apra ed esegua il file PY nel suo IDE o lo esegua direttamente dal suo ambiente Python.
Eseguire il programma da RoboDK
I driver per robot offrono un'alternativa alla Programmazione offline (in cui un programma viene generato, poi trasferito al robot ed eseguito). Può eseguire una simulazione da RoboDK direttamente sul robot (Programmazione online). Maggiori informazioni sono disponibili nella sezione Driver robot.
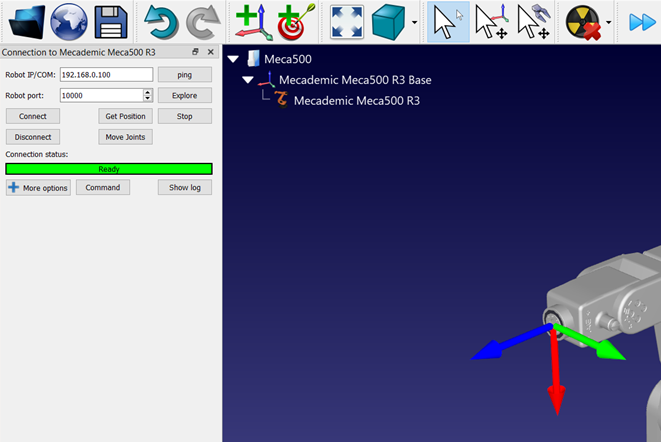
Segua questi passaggi per collegarsi al robot da RoboDK:
1.Clicchi con il tasto destro del mouse sul robot in RoboDK.
2.Selezionare: 
3.Inserisca l'IP del robot
4.Selezionare Connetti.
Dovrebbe apparire un messaggio verde che indica Pronto se la connessione è riuscita.
Il robot può essere spostato selezionando Ottieni giunti del robot, Sposta giunti, dal menu dei collegamenti.
Esistono due metodi diversi per eseguire il programma dal PC al robot:
1.Esecuzione sul robot passo dopo passo con feedback in RoboDK (programmazione online):
Questo metodo utilizza il robot come server e ogni istruzione viene inviata al robot passo dopo passo, mentre viene eseguita nel simulatore. Questo metodo è utile per il debug.
a.Clicchi con il tasto destro del mouse sul programma (Print3D in questo esempio).
b.Selezionare Esegui sul robot
c.Clicchi due volte sul programma per avviarlo (oppure clicchi con il tasto destro del mouse e selezioni Esegui).
Una volta selezionata questa opzione, si collegherà al robot reale ogni volta che facciamo doppio clic su un programma (o clicchiamo con il tasto destro del mouse, quindi selezioniamo Esegui).
Queste operazioni sono disponibili anche nell'API RoboDK, che consente di integrare la programmazione dei robot con altre applicazioni. L'API è disponibile in Python e C# e in altri linguaggi di programmazione.
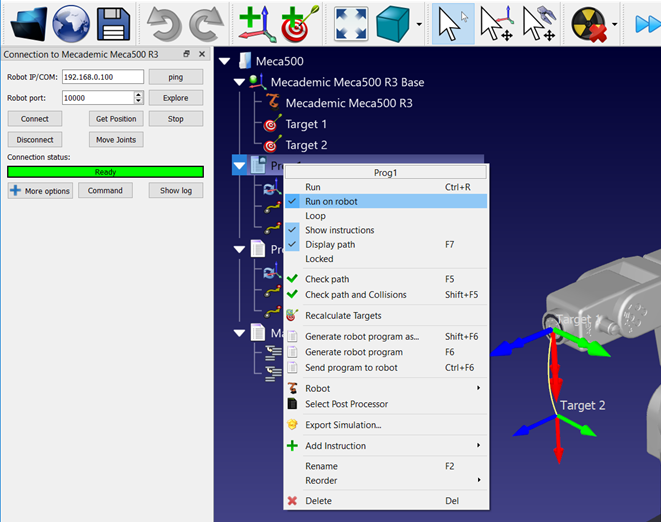
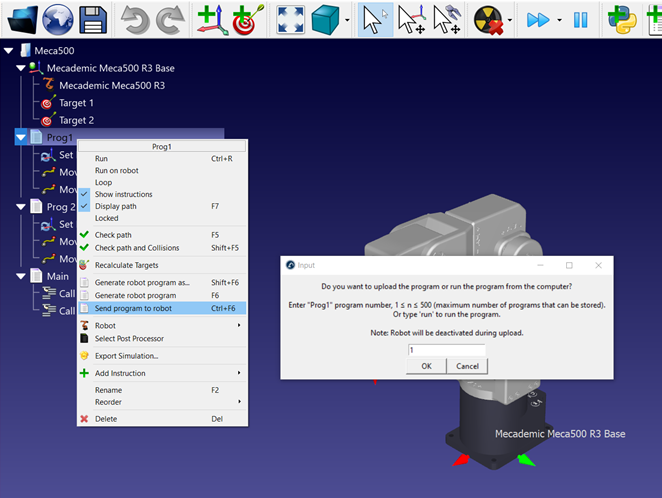
2.Invia il programma al robot utilizzando i post-processori Mecademic. Può essere utilizzato per eseguire il programma sul robot, specificando "run" come numero di programma. Il programma completo può anche essere salvato sul controller del robot come programma offline (vedere Programmazione offline del robot):
a.Clicchi con il tasto destro del mouse sul programma (Prog1 in questo esempio).
b.Selezioni Invia programma al robot (Ctrl+F6).
Altri suggerimenti
Questa sezione fornisce altre informazioni utili per la programmazione dei robot Mecademic Meca500.
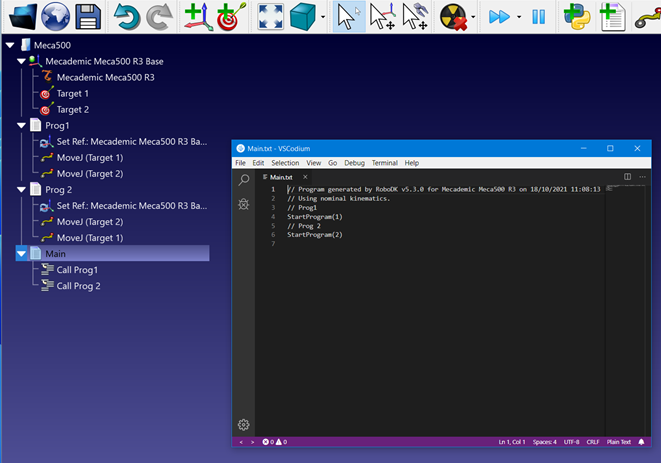
Programmi offline
I programmi offline sono persistenti sul robot e possono essere richiamati utilizzando il rispettivo numero di programma. Può automatizzare la selezione del numero di programma aggiungendolo al nome del programma.
RoboDK recupererà automaticamente l'ID e lo utilizzerà per chiamare il programma. Questo vale anche per le subroutine, veda l'esempio seguente.
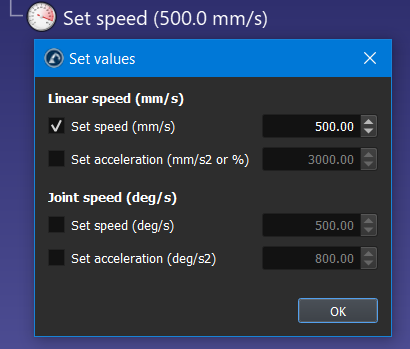
Unità di velocità
Le unità di velocità del giunto e le accelerazioni lineari e del giunto per i robot Mecademic devono essere fornite come valore percentuale (%), contrariamente alle altre unità visualizzate nel menu delle istruzioni di impostazione della velocità.
La velocità lineare è corretta e deve essere fornita in mm/s.