Aggiornare pulsazioni per grado
I robot Motoman richiedono le pulsazioni per grado per ogni giunto in modo da convertire i gradi da pulsazioni ad angoli e vice-versa. RoboDK automaticamente effettua questa conversione se questa informazione è fornita nei parametri del robot. Per verificare se questa informazione è fornita o per aggiornarla:
1.Fai doppio click sul robot in RoboDK
2.Seleziona Parametri
3.Seleziona Sblocca opzioni avanzate
4.Revisiona o aggiorna i valori di pulsazioni/grado per ogni giunto
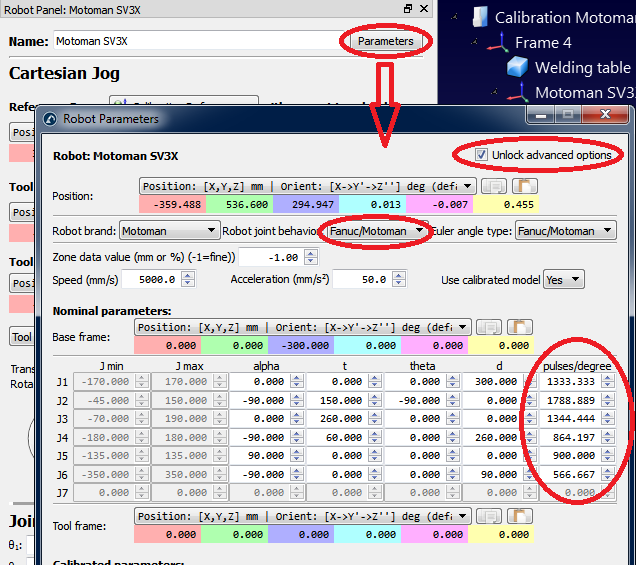
Inoltre, è anche importante notare che alcuni robot Motoman hanno un accoppiamento tra i giunti 2 e 3. Ciò significa che quando il giunto 3 si muove, si muove anche il giunto 2. In questo caso, il campo Comportamento Giunti Robot deve essere impostato su Fanuc/Motoman.