Trasferisca un file via USB
Utilizzando il post processor predefinito, otterrà il suo programma come file ZIP. Deve preparare un'unità USB con le seguenti caratteristiche per caricare correttamente il file sul robot:
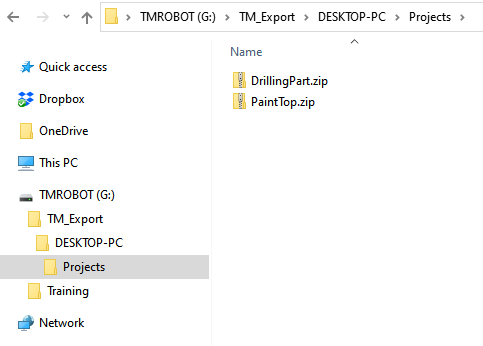
1.Assegna un nome all'unità USB TMROBOT (questo passaggio è importante).
2.Crei una nuova cartella denominata TM_Export nella radice della sua unità.
3.Crei una nuova cartella all'interno di TM_Export con il suo progetto (qualsiasi nome dovrebbe funzionare).
4.Crei una nuova cartella all'interno della cartella precedente, chiamata Progetti.
5.Posizioni i programmi ZIP all'interno della cartella Progetti.
Segua questi passaggi per caricare il programma in TMFlow:
1.Salvi il file ZIP creato da RoboDK nell'unità USB nella cartella seguendo i passi precedenti.
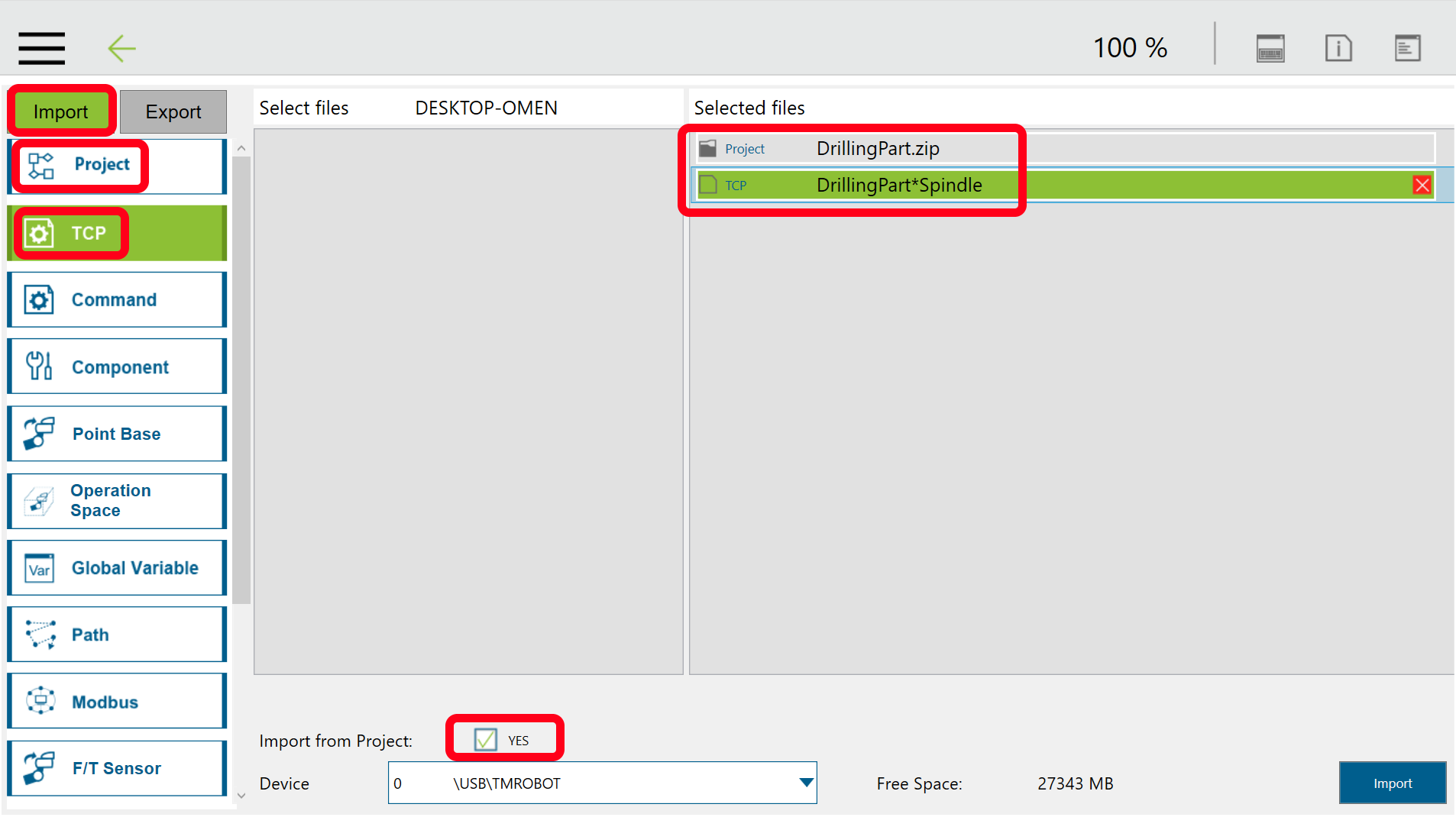
2.Selezioni il menu principale➔ Sistema➔ Importazione/Esportazione
3.Selezioni Importazione e selezioni la sua cartella in TM_Export.
4.Selezioni Progetto e selezioni il suo programma ZIP.
5.Selezionare TCP
6.Selezioni l'opzione Importazione dal progetto➔ Sì
7.Selezioni il suo programma e selezioni gli strumenti del suo programma per assicurarsi di caricarli.
8.Selezionare Importazione
Il suo programma sarà ora disponibile quando selezionerà di aprire nuovi programmi.