Robot Omron-TM
I robot Omron-TM possono essere programmati offline da RoboDK utilizzando i file TMFlow ZIP. Può anche utilizzare il driver del robot quando il robot si trova in un Nodo di Ascolto per spostare il robot direttamente da RoboDK in tempo reale.
Trasferisca un file via USB
Utilizzando il post processor predefinito, otterrà il suo programma come file ZIP. Deve preparare un'unità USB con le seguenti caratteristiche per caricare correttamente il file sul robot:
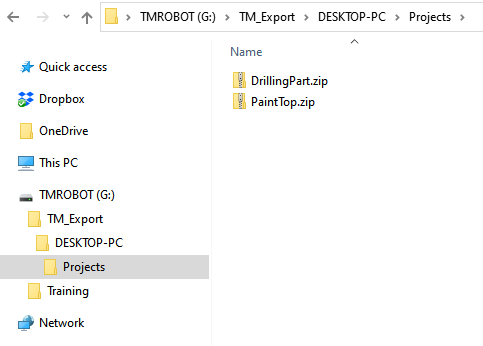
1.Assegna un nome all'unità USB TMROBOT (questo passaggio è importante).
2.Crei una nuova cartella denominata TM_Export nella radice della sua unità.
3.Crei una nuova cartella all'interno di TM_Export con il suo progetto (qualsiasi nome dovrebbe funzionare).
4.Crei una nuova cartella all'interno della cartella precedente, chiamata Progetti.
5.Posizioni i programmi ZIP all'interno della cartella Progetti.
Segua questi passaggi per caricare il programma in TMFlow:
1.Salvi il file ZIP creato da RoboDK nell'unità USB nella cartella seguendo i passi precedenti.
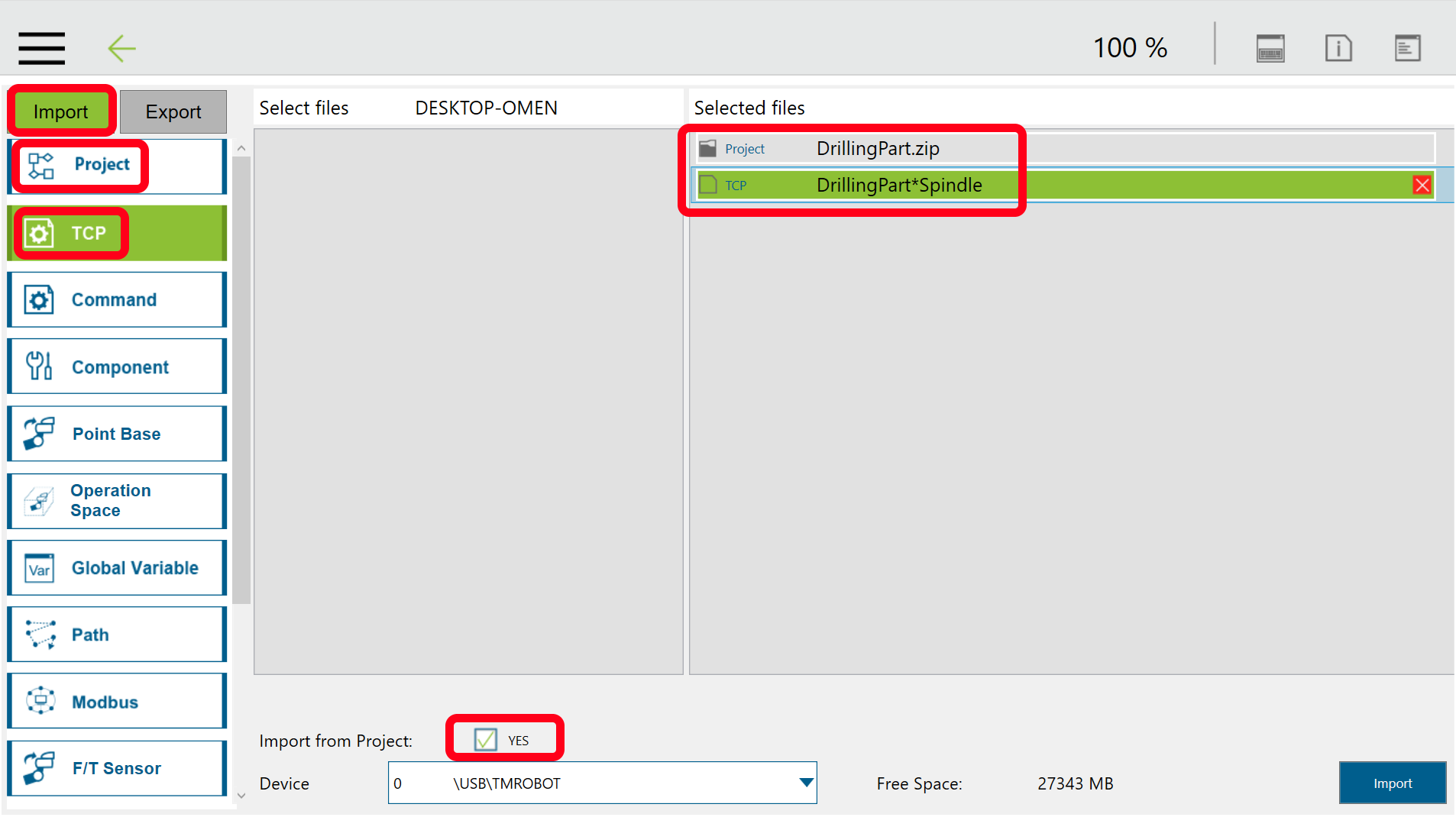
2.Selezioni il menu principale➔ Sistema➔ Importazione/Esportazione
3.Selezioni Importazione e selezioni la sua cartella in TM_Export.
4.Selezioni Progetto e selezioni il suo programma ZIP.
5.Selezionare TCP
6.Selezioni l'opzione Importazione dal progetto➔ Sì
7.Selezioni il suo programma e selezioni gli strumenti del suo programma per assicurarsi di caricarli.
8.Selezionare Importazione
Il suo programma sarà ora disponibile quando selezionerà di aprire nuovi programmi.
Impostazione del nodo di ascolto
Può eseguire programmi sul suo robot Omron-TM direttamente da RoboDK, utilizzando il driver RoboDK per Omron-TM. Può anche generare programmi come file di script che vengono trasmessi tramite il protocollo TCP/IP. In entrambi i casi, deve assicurarsi che il robot si trovi in un Nodo di ascolto. Questa sezione descrive come impostare la comunicazione in RoboDK e sul robot Omron-TM.
È possibile scegliere tra diversi post processor o personalizzare i post processor per definire il modo in cui i programmi vengono generati offline ed eseguiti (ad esempio, per supportare una pinza o dei sensori esterni).
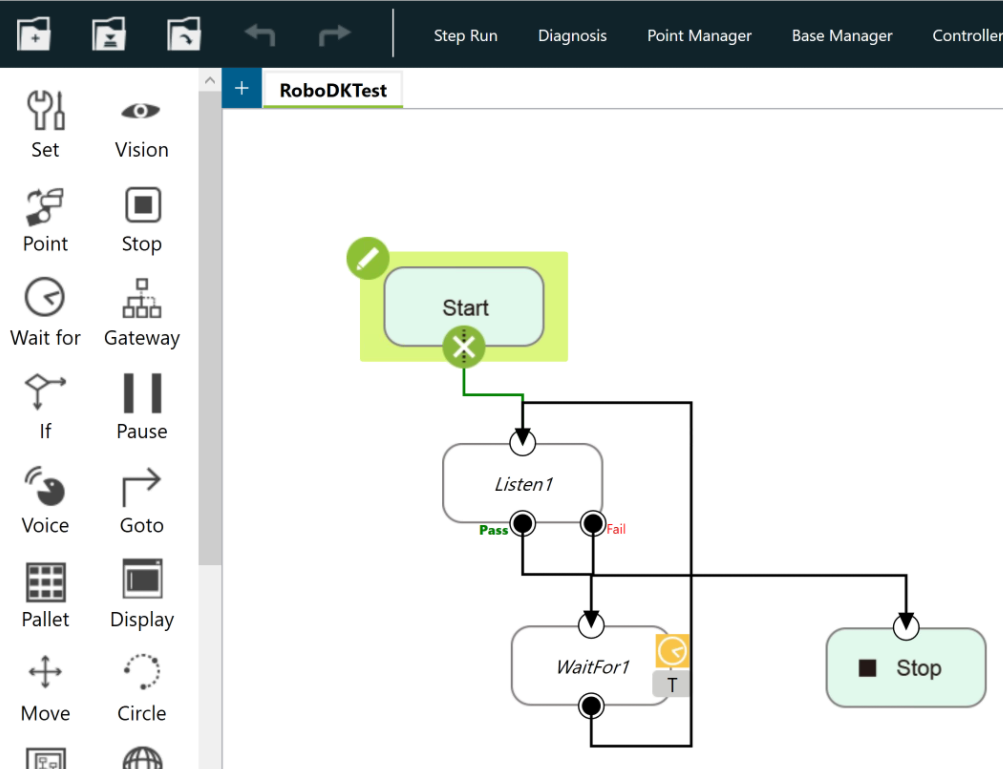
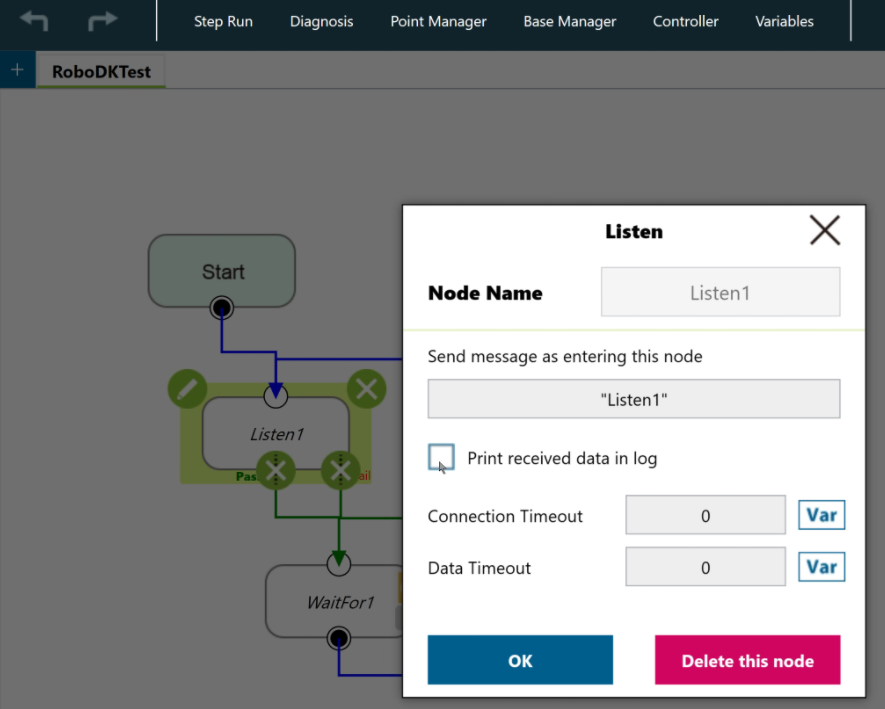
Affinché il robot possa muoversi a distanza, deve essere in modalità Ascolto. Questo si ottiene utilizzando un Nodo di ascolto. L'immagine seguente mostra un flusso di lavoro del programma suggerito per avere un programma che esegue automaticamente il programma inviato da RoboDK. Si consiglia di selezionare Stampa dati ricevuti nel registro per risolvere i problemi.
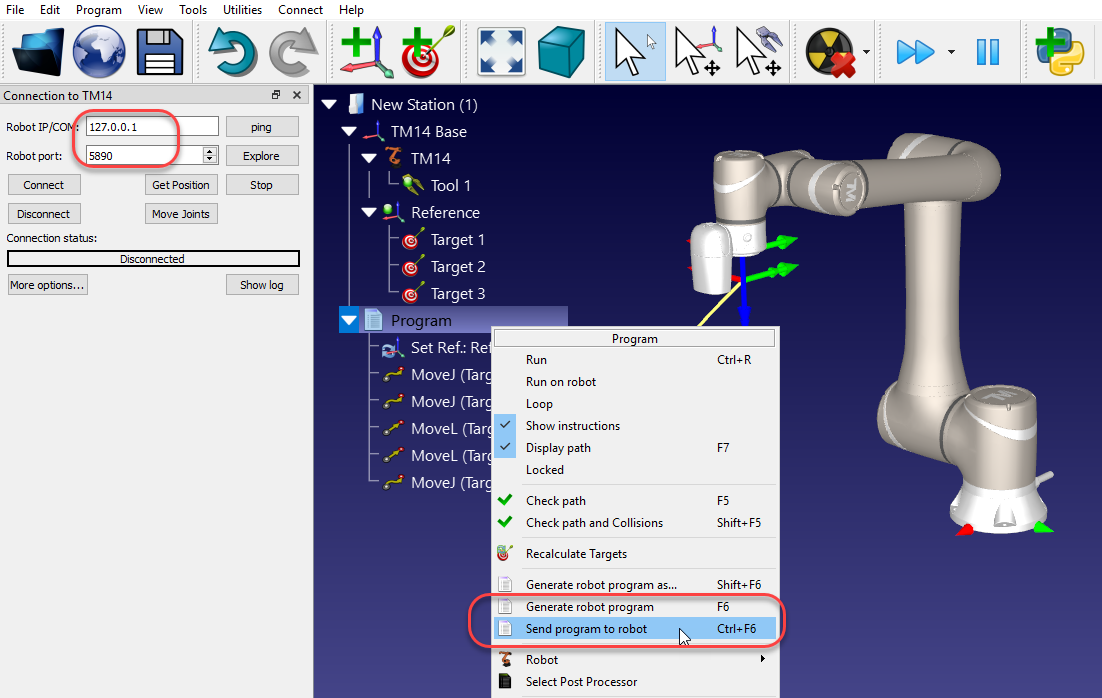
Segua questi passaggi per impostare la comunicazione in RoboDK ed eseguire un programma:
1.Selezionare Connect➔ Collegare il robot
2.Inserire l'IP del robot
3.Inserisca la porta 5890
4.Clicchi con il tasto destro del mouse sul suo programma
5.Selezionare Genera programma robot F6.