Aggiorna Cinematiche Robot
Seguire questi passaggi in questa sezione è opzionale e solamente richiesto in certe circostanze quando l'accuratezza è richiesta nella programmazione offline. Questa sezione spiega come inserire valori unici delle cinematiche del robot UR in RoboDK per simulare accuratamente e generare programmi robot.
Le cinematiche robot UR differiscono in sei valori di distanza da un robot all'altro e dai valori del simulatore. Dipendentemente da come il robot è programmato potrebbe essere importante prendere in considerazione questi valori.
Le cinematiche accurate di uno specifico robot UR possono esser usate in RoboDK seguendo questi passaggi:
1.Ottieni il file urcontrol.conf.[UR3/UR5/UR10] da una finestra chiamata URControl dentro il controller del robot. Il file può esser trasferito utilizzando una chiavetta USB, oppure tramite connessione FTP come mostrato nella sezione precedente.
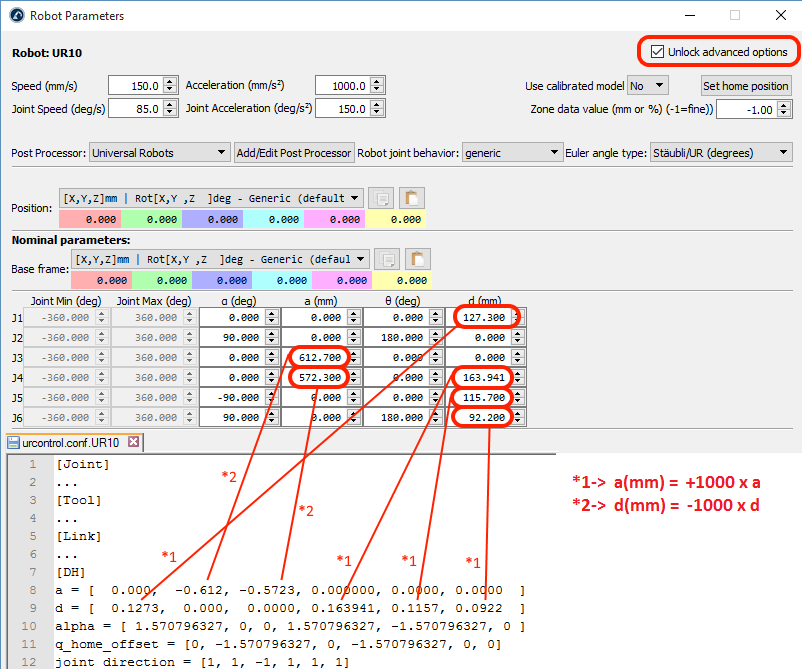
2.Apri il file in un editor testo e leggi i valori [DH] come mostrato nell'immagine.
3.Apri la finestra dei parametri del robot da RoboDK facendo doppio click sul robot e selezionando "Parametri".
4.Seleziona "Sblocca opzioni avanzate" per esser in grado di modificare i valori delle sei distanze.
5.Immetti i sei valori evidenziati in rosso nella tabella DH del file urcontrol.conf.ur10 in RoboDK, come mostrato nell'immagine.
Una volta completato, possiamo cliccare con il tasto destro il robot e selezionare Salva come .robot. Questi parametri sono salvati come file robot.
I parametri d devono essere moltiplicati per 1000 (da metri a millimetri)
Le cinematiche UR cambiano da robot a robot perchè ogni robot è calibrato in fabbrica. Altre marche come KUKA, ABB, Motoman o Fanuc non calibrano i loro robot a meno che l'opzione Accuratezza Assoluta è stata acquistata. L'opzione Accuratezza Assoluta può prendere in considerazione fino a 40 parametri di calibrazione o anche più.