Inizia un Programma dal PC
I driver robot forniscono un'alternativa alla programmazione Offline (dove un programma è generato e poi trasferito al robot per la sua esecuzione). Con i driver robot, è possibile iniziare una simulazione direttamente sul robot (Programmazione Online). Più informazioni disponibili nella sezione Driver Robot.
Programmi robot posson essere eseguiti direttamente da RoboDK al robot reale se una connessione alla rete è stata stabilita.
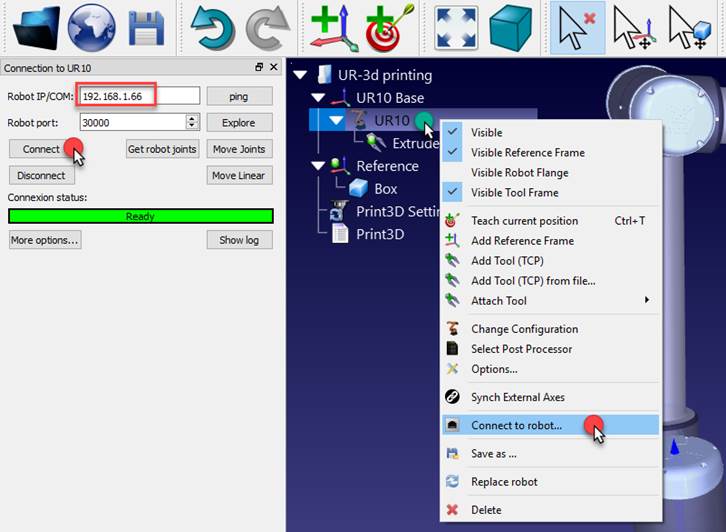
1.Clicca con il tasto destro sul robot in RoboDK
2.Seleziona: 
3.Immetti l'IP del robot
4.Seleziona Connetti
Dovrebbe comparire un messaggio verde con visualizzato Pronto se la connessione è stata stabilita.
Il robot può essere mosso selezionando Ottieni giunti robot, Muovi Giunti e Muovi Lineare, dal menù connessione.
Ci sono due diversi metodi per iniziare un programma dal PC sul robot:
1.Inizia su robot passo passo con feedback in RoboDK (Programmazione Online):
Questo metodo utilizza il robot come un server e ogni istruzione è inviata al robot passo passo come eseguito dal simulatore. Questo metodo è utile per scopi di debug.
a.Clicca con il tasto destro sul programma (Print3D in questo esempio)
b.Seleziona Inizia su robot (F6)
c.Fai doppio click sul programma per iniziarlo (o tasto destro e seleziona Inizia)
Una volta che questa opzione è selezionata ci si connetterà al robot reale ogni volta che facciamo doppio click sul programma (o tasto destro e seleziona Inizia)
Queste operazioni sono anche disponibili dall'API e permettono di integrare RoboDK in altre applicazioni. L'API è disponibile per Python e C#.
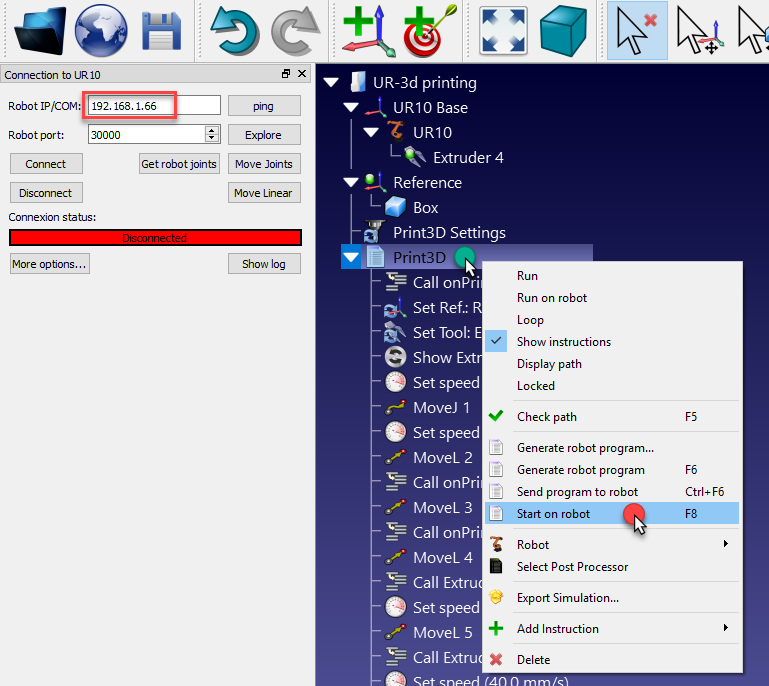
2.Inizia su robot genera il programma completo, lo trasferisce al robot ed inizia il programma sul robot reale (Programmazione Offline):
a.Tasto destro sul programma (Print3D ad esempio)
b.Seleziona Inizia su robot (F8)