Ottieni l'IP del robot UR
L'IP del robot è richiesto per eseguire programmi direttamente dal simulatore RoboDK. È anche possibile trasferire programmi tramite FTP.
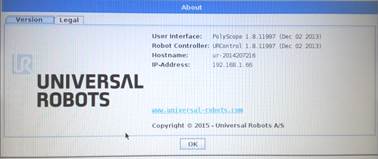
L'IP del robot può essere ottenuto tramite il menu About della schermata principale del teach pendant UR.
Il robot deve essere connesso al computer tramite una connessione Ethernet (direttamente o tramite una rete). Un Ping test permette di testare se la connessione alla rete è stata propriamente stabilita.