Calibrare i parametri del robot
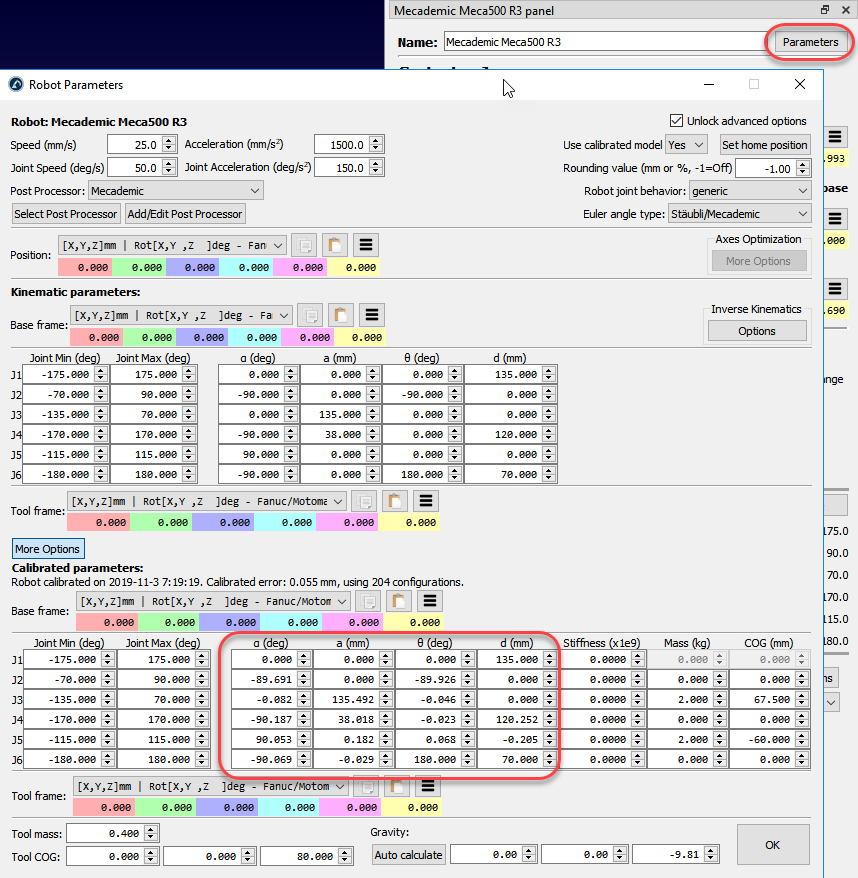
Può accedere ai parametri calibrati nel menu Parametri, una volta che il robot è stato calibrato. Alcuni controllori di robot consentono di modificare alcuni parametri del robot.
Nota: RoboDK utilizza la convenzione Denatit-Hartenberg Modified. Si assicuri di utilizzare tutti i parametri selezionati/calibrati.
Importante: dobbiamo assicurarci di non generare programmi filtrati se aggiorniamo i parametri del controller del robot.