Calibrazione del sistema
Questa sezione la guiderà a calibrare il robot e la sonda. Questa fase deve essere eseguita solo una volta, ma è importante per ottenere risultati di buona precisione.
Prima di iniziare la calibrazione, si consiglia di caricare i modelli 3D della sua cella. Questo la aiuterà ad evitare automaticamente le collisioni durante il processo di calibrazione. Se non dispone dei modelli 3D di ogni componente, può semplicemente caricare scatole di piani e sfere per rappresentare le aree a cui non vuole accedere.
Calibrazione robot
Questa sezione descrive come calibrare automaticamente il suo robot utilizzando RoboDK TwinTrack e il suo sistema di misurazione. La calibrazione del robot le consente di migliorare la precisione del robot fino a 0,150 mm quando genera programmi offline o utilizzando gli strumenti TwinTrack teach by demonstration in RoboDK (il livello di precisione dipende molto dalla qualità e dalle dimensioni del robot).
Si consiglia di eseguire la calibrazione del robot dopo aver costruito la cella robotica o dopo aver apportato modifiche importanti (come la modifica del carico utile dell'utensile). Questo aiuta a ottenere la migliore precisione.
Prima di iniziare la calibrazione, può modellare la cella in RoboDK per evitare automaticamente le collisioni. Può utilizzare geometrie di base come piani o cubi per evitare aree indesiderate. Può anche limitare lo spazio dei giunti del robot.
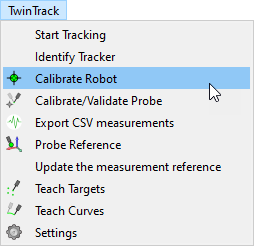
Può selezionare TwinTrack➔ Calibra robot per avviare la procedura di calibrazione del robot.
Questa operazione la guiderà nella calibrazione del robot, compresa la generazione automatica di punti per la calibrazione e la convalida. RoboDK può generare automaticamente i punti che sono visibili dal tracker.
La procedura di calibrazione del robot richiede l'esecuzione di circa 200 misurazioni. La procedura inizia prendendo alcune misure intorno alla posizione iniziale del robot
Una volta che la configurazione è pronta e la comunicazione con il robot è stata stabilita correttamente, la procedura di calibrazione dovrebbe richiedere 15-30 minuti.
Il sistema non richiede attrezzature o accessori speciali, ma si limita a tracciare la posizione dell'utensile rispetto al riferimento del tracker.
Non c'è problema se si perdono alcune misurazioni perché i bersagli non sono visibili.
Calibrazione della sonda
È importante calibrare correttamente la punta della sonda e assicurarsi che sia precisa entro le tolleranze desiderate.
La calibrazione della punta della sonda si ottiene muovendo la punta intorno a un punto statico.
Selezioni TwinTrack➔ Calibrate/Validate Probe Tip per avviare la calibrazione dello strumento.
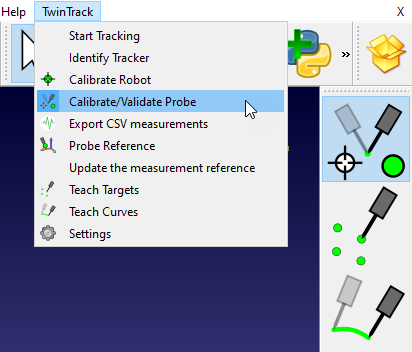
In questo caso, poiché stiamo utilizzando Creaform HandyProbe, è possibile calibrare la sonda con il software Creaform VXElements e convalidarla con RoboDK.
Per convalidare la punta della sua sonda, deve semplicemente spostarsi intorno a un punto statico e RoboDK visualizzerà la precisione.
Programmazione offline
Può utilizzare le funzioni di insegnamento tramite dimostrazione senza un robot reale. Ciò significa che può simulare e programmare il robot offline solo con il suo sistema di misurazione, prima di avere accesso al robot reale.
È sufficiente avere una parte con un sistema di coordinate ben definito da utilizzare come riferimento.
Una volta preparato il sistema di misurazione e il suo pezzo, può seguire questi passaggi per definire il sistema di coordinate del suo dispositivo di misurazione:
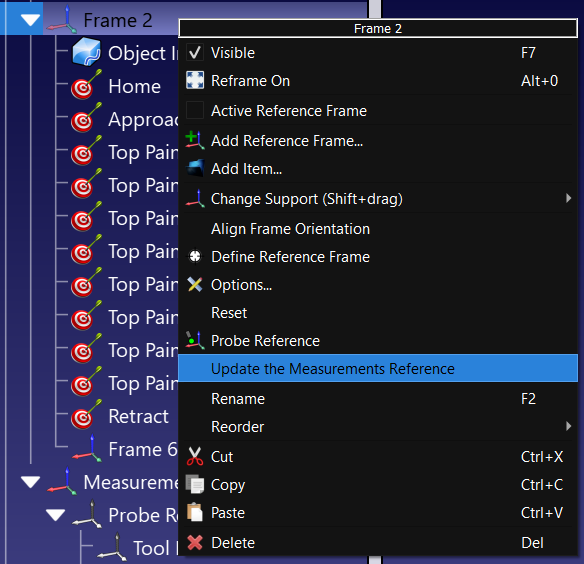
1.Clicchi con il tasto destro del mouse sul sistema di coordinate della sua parte (o sul sistema di coordinate della dima a cui è collegata).
2.Selezioni Aggiorna il riferimento alle misurazioni.
3.Segua le istruzioni sullo schermo per insegnare 3 punti che definiscono il sistema di coordinate: l'origine, un punto su X+ e un punto su Y+.
Il sistema di misurazione verrà aggiornato di conseguenza e lei potrà procedere all'insegnamento di punti, curve o altri sistemi di coordinate.