Configurazione
Per utilizzare il sistema TwinTrack, deve caricare il suo robot in RoboDK e collegarsi al robot e al sistema di misurazione. Possiamo opzionalmente modellare la cella aggiungendo i modelli 3D degli oggetti e degli strumenti. Questo aiuterà a prevenire le collisioni.
8.Caricare il robot:
a.Selezioni File➔ Aprire la libreria online. La libreria online verrà visualizzata in RoboDK.
b.Utilizzi i filtri per trovare il suo robot.
c.Selezioni Download per caricare automaticamente il robot nella sua stazione RoboDK.
d.In alternativa, scarichi il file del robot direttamente dalla libreria online (https://robodk.com/library) e apra il file con RoboDK (file .robot).
9.Colleghi il sistema di misurazione:
a.Colleghi il sistema di misurazione al suo computer.
b.Selezioni Connetti e si colleghi al suo sistema di misurazione. Si assicuri che sia installato anche il software necessario. Potrebbe essere necessario l'IP del tracker, a seconda del sistema di misurazione utilizzato.
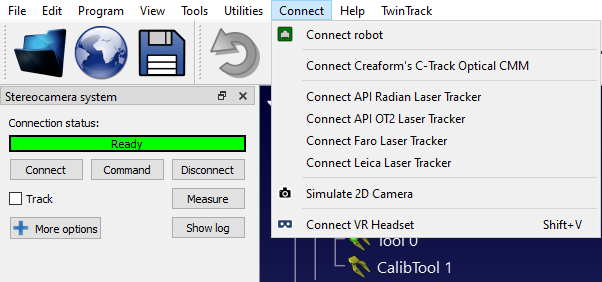
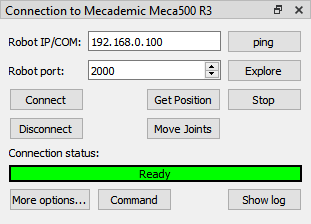
10.Colleghi il robot:
a.Selezioni Collegare➔ Collegare il robot.
b.Inserisca l'IP e la porta del robot.
c.Selezionare Connetti.