Filtraggio dei programmi
Una volta che il robot è stato calibrato, dobbiamo assicurarci di generare programmi filtrati o di tenere conto dei parametri calibrati del robot per assicurarci di trarre vantaggio dalla calibrazione del robot.
Dobbiamo seguire uno e uno solo dei seguenti metodi per programmare i robot in modo accurato dopo la calibrazione:
1.Utilizzi RoboDK per la programmazione offline per generare programmi accurati (i programmi generati sono già filtrati). Questa è l'opzione di programmazione offline consigliata per ottenere risultati di precisione ottimali.
2.Calibrare i parametri del controllore del robot (come le lunghezze dei collegamenti, i parametri DH-DHM e/o i parametri di masterizzazione).
Programmazione offline accurata
Quando un robot è stato calibrato con RoboDK, abbiamo l'opzione di attivare la cinematica accurata facendo clic con il pulsante destro del mouse sul robot e selezionando Usa cinematica accurata.
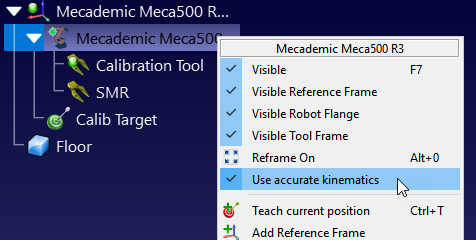
Se la precisione è attiva, vedremo un punto verde, se non è attiva, vedremo un punto rosso.
Questa è l'opzione consigliata per ottenere risultati di precisione ottimali. Con l'opzione di precisione del robot attivata in RoboDK, tutti i programmi generati da RoboDK saranno automaticamente filtrati. Ciò significa che tutte le coordinate cartesiane saranno leggermente modificate per compensare gli errori del robot.
Questa è l'opzione più adatta se intende utilizzare i suoi robot per la fresatura robotizzata, programmare i robot da file NC o utilizzare uno dei plugin CAD/CAM supportati da RoboDK.
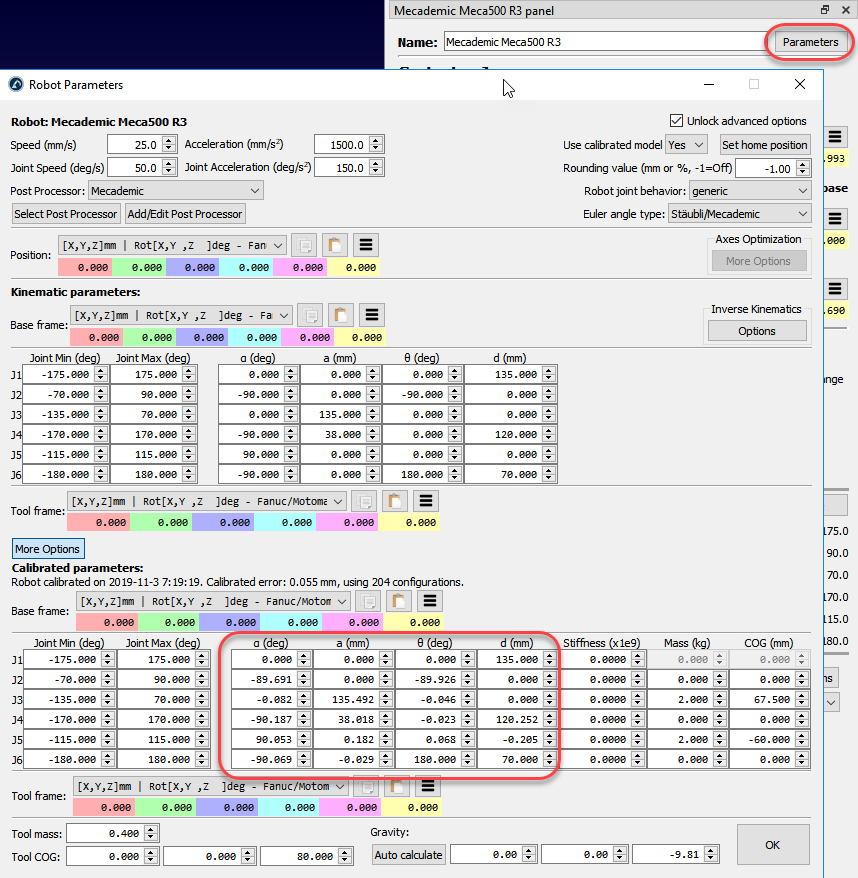
Calibrare i parametri del robot
Può accedere ai parametri calibrati nel menu Parametri, una volta che il robot è stato calibrato. Alcuni controllori di robot consentono di modificare alcuni parametri del robot.