Insegnare le curve in movimento
Può creare curve, bersagli e sistemi di coordinate su un oggetto in movimento, se il suo sistema di misurazione supporta il tracciamento di più oggetti contemporaneamente. Questo può essere fatto seguendo la stessa procedura come se fossero statici.
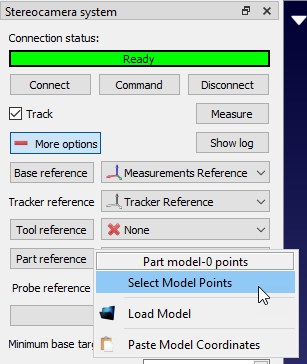
La differenza principale è che l'oggetto in movimento deve essere tracciato in tempo reale (utilizzando un tracker o bersagli riflettenti). Ad esempio, se utilizza il sistema di misurazione Creaform C-Track, deve specificare il modello nella sezione di riferimento del pezzo e collegarlo al sistema di coordinate che rappresenta.
La dipendenza corretta dei sistemi di coordinate e degli oggetti deve essere definita in RoboDK, in modo da poter definire nuovi sistemi di coordinate rispetto al bersaglio in movimento.
Questo metodo di programmazione dei pezzi potrebbe non essere così preciso come quando i pezzi sono statici.