Insegnare le curve
Con RoboDK TwinTrack può creare percorsi o curve del robot manualmente con la sua sonda.
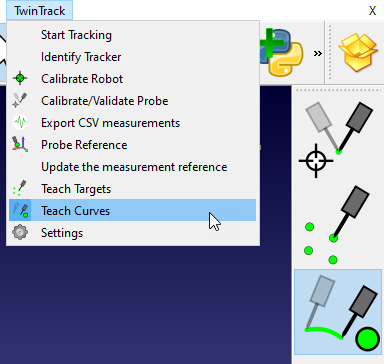
Può avviare la modalità di apprendimento dei bersagli selezionando TwinTrack➔ Insegna curve. Questo pulsante è disponibile anche nella barra degli strumenti TwinTrack per impostazione predefinita.
RoboDK calcola e visualizza la posizione del robot in tempo reale in base alla posizione della sua mano. Può vedere facilmente quali aree sono raggiungibili dal suo robot.
Può creare una curva tenendo premuto il primo pulsante della sonda. Quando desidera creare un programma, può premere il secondo pulsante della sonda e RoboDK creerà e simulerà il programma:
●Tenga premuto il primo pulsante: insegna curve/percorsi.
●Secondo pulsante: creare e simulare il programma in RoboDK.
●Tenga premuto il secondo pulsante: esegue il programma sul robot.