Insegnare un sistema di coordinate
Con RoboDK TwinTrack può sondare e localizzare i sistemi di coordinate (o piani di riferimento) per individuare gli oggetti nell'area di lavoro del robot.
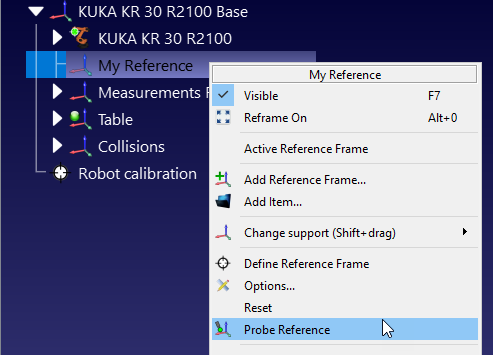
Clicchi con il tasto destro del mouse sul suo sistema di coordinate e selezioni Riferimento sonda.
Suggerimento: si assicuri di aggiungere un nuovo quadro di riferimento collegato alla base del suo robot se non ha un quadro di riferimento personalizzato (selezioni Programma➔ Aggiungi piani di riferimento).
Dovrà quindi sondare 3 punti nel seguente ordine:
1.Primo punto nell'origine.
2.Secondo punto lungo l'asse X positivo.
3.Terzo punto lungo l'asse Y positivo.
Impostando correttamente il sistema di coordinate, può programmare i robot a distanza. Ad esempio, se dispone di un sistema di coordinate correttamente definito, quando desidera programmare un nuovo pezzo può farlo semplicemente dal suo ufficio o da casa, senza doversi avvicinare al robot.
Video: Come creare un sistema di coordinate con RoboDK TwinTrack: https://youtu.be/IP2UMXQk-nY?t=32.