Programmazione offline
Può utilizzare le funzioni di insegnamento tramite dimostrazione senza un robot reale. Ciò significa che può simulare e programmare il robot offline solo con il suo sistema di misurazione, prima di avere accesso al robot reale.
È sufficiente avere una parte con un sistema di coordinate ben definito da utilizzare come riferimento.
Una volta preparato il sistema di misurazione e il suo pezzo, può seguire questi passaggi per definire il sistema di coordinate del suo dispositivo di misurazione:
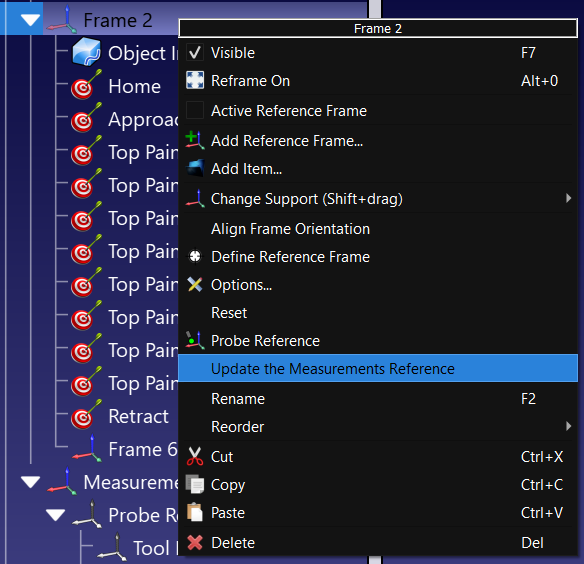
1.Clicchi con il tasto destro del mouse sul sistema di coordinate della sua parte (o sul sistema di coordinate della dima a cui è collegata).
2.Selezioni Aggiorna il riferimento alle misurazioni.
3.Segua le istruzioni sullo schermo per insegnare 3 punti che definiscono il sistema di coordinate: l'origine, un punto su X+ e un punto su Y+.
Il sistema di misurazione verrà aggiornato di conseguenza e lei potrà procedere all'insegnamento di punti, curve o altri sistemi di coordinate.