Quadro di riferimento e quadro utensile
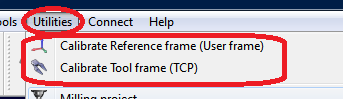
RoboDK fornisce alcune utilità per calibrare i piani di riferimento e i telai degli strumenti. Questi strumenti sono accessibili rispettivamente da Utilità➔ Calibrare il quadro di riferimento e da Utilità➔ Calibrare il quadro strumenti.
Per calibrare un piano di riferimento o un utensile che non è stato calibrato automaticamente (noti anche come piano utente e TCP rispettivamente), abbiamo bisogno di alcune configurazioni del robot che toccano 3 o più punti; queste configurazioni del robot possono essere valori dei giunti o coordinate cartesiane (con dati di orientamento in alcuni casi). Si consiglia di utilizzare i valori dei giunti invece delle coordinate cartesiane, in quanto è più facile controllare la configurazione reale del robot in RoboDK (copiando e incollando i giunti del robot nella schermata principale di RoboDK).
Calibrazione dell'utensile
Selezioni lo strumento Utilità➔ Calibra per calibrare il TCP utilizzando RoboDK. Possiamo usare il numero di punti desiderato, utilizzando orientamenti diversi. Un numero maggiore di punti e variazioni di orientamento più ampie è meglio, in quanto otterremo una stima migliore del TCP e una buona stima dell'errore del TCP.
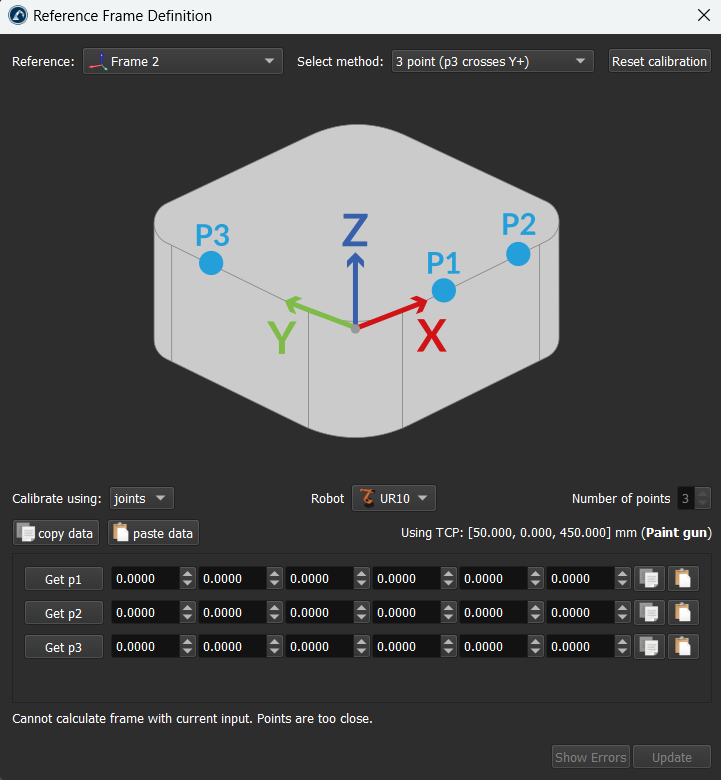
Calibrazione dei piani di riferimento
Selezioni Utilità➔ Calibra riferimento per calibrare un quadro di riferimento. È possibile impostare un quadro di riferimento utilizzando diversi metodi. Nell'esempio della figura, un quadro di riferimento è definito da tre punti: i punti 1 e 2 definiscono la direzione dell'asse X e il punto 3 definisce l'asse Y positivo.