RoboDK TwinTrack
RoboDK TwinTrack le consente di imitare e riprodurre facilmente i movimenti umani con un robot, per un'automazione rapida e affidabile. Può insegnare manualmente al suo robot il percorso da seguire, nello stesso modo in cui eseguirebbe manualmente un'operazione di produzione con le mani; può tracciarlo e riprodurlo con un robot.
Introduzione
RoboDK TwinTrack offre un nuovo modo di insegnare ai robot tramite dimostrazione e può essere utilizzato per molte applicazioni di produzione come la verniciatura, la lucidatura, la sbavatura, l'erogazione, la saldatura ecc...
Un vantaggio dell'utilizzo di un metodo di insegnamento per dimostrazione come TwinTrack è che può imitare l'operazione di produzione con il suo robot e il robot riprodurrà lo stesso movimento. Questo metodo di programmazione dei robot non richiede l'uso di modelli 3D. Non richiede nemmeno che un operatore utilizzi un computer. Questo le permetterà di risparmiare una quantità significativa di tempo e di iniziare a programmare i robot più rapidamente.

RoboDK TwinTrack richiede un sistema di misurazione 6D e una sonda portatile o uno strumento di produzione portatile che le permetta di imitare l'operazione di produzione con le mani.
RoboDK supporta oltre 1000 robot di 90 diversi produttori di robot. Ciò significa che può programmare qualsiasi braccio robotico supportato da RoboDK. Può anche creare robot e meccanismi personalizzati.
Con gli strumenti di calibrazione TwinTrack e RoboDK può creare programmi robotici altamente precisi. Con un buon sistema di misurazione, è possibile raggiungere una precisione di posizione fino a 0,150 mm. Il livello di precisione dipende molto dalla qualità e dalle dimensioni del robot. Utilizzando gli strumenti di calibrazione RoboDK, può creare con precisione il suo gemello digitale.
Requisiti
Per utilizzare gli strumenti TwinTrack, è necessario installare il RoboDK TwinTrack Add-in e disporre di un sistema di misurazione supportato.
Si assicuri di avere i seguenti elementi:
1.Uno o più bracci di robot industriali.
2.Un sistema di misurazione supportato (6 DOF). I sistemi di misurazione supportati includono:
a.Inseguitori HTC Vive (SteamVR)
b.Kit completo per la realtà virtuale (SteamVR)
c.Tracker laser con capacità di 6 DOF e driver RoboDK supportato.
d.Creaform C-Track
e.Sistema di telecamere OptiTrack (si consiglia di utilizzare 4 PrimeX13 per una migliore precisione)
1.Il software RoboDK deve essere installato e deve essere installata una licenza appropriata per TwinTrack.
2.Se vuole eseguire automaticamente i programmi del robot, ha bisogno di driver robotici compatibili per il suo controller robot.
3.Installi l'Add-in TwinTrack RoboDK:
a.Scarichi l'Add-in TwinTrack (file .rdkp).
b.Clicchi due volte sul file per installare l'Add-in e aprirlo in RoboDK.
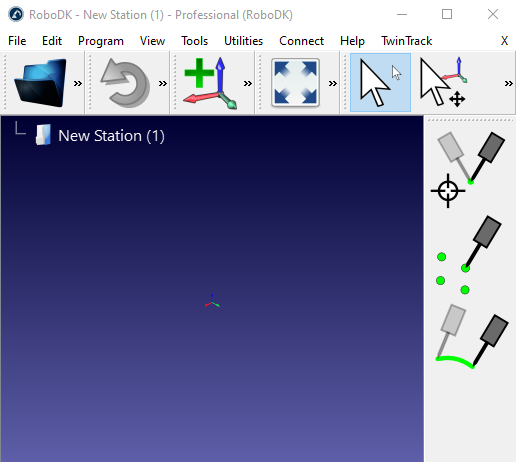
c.Se non vede il menu TwinTrack: selezioni Strumenti➔ Add-in Manager e faccia doppio clic su TwinTrack per visualizzare il menu TwinTrack in alto a destra.
Configurazione con i tracker SteamVR e HTC Vive
Questa sezione la guida attraverso i passaggi per configurare SteamVR. Può utilizzare uno strumento personalizzato con un tracker per imitare le operazioni di produzione con la mano, in modo che il robot possa riprodurre lo stesso movimento.
RoboDK TwinTrack supporta i sistemi di Realtà Virtuale e tutti i tracker supportati da SteamVR, compresi i tracker HTC Vive da v1 a v3.
Segua questi passaggi per configurare il suo sistema SteamVR per TwinTrack:
1.Installi Steam se non l'ha ancora fatto; potrebbe essere necessario creare un account con Steam.
2.Installi SteamVR, un'estensione di Steam che aggiunge il supporto alla Realtà Virtuale e al Tracciamento 6D.
3.Elimini la necessità di avere delle cuffie per la Realtà Virtuale se non le ha o se non ne ha bisogno, seguendo questi passaggi:
a.Modifichi il seguente file con un editor di testo:
C:\Programmi (x86)\Steam\steamapps\comune\SteamVR\drivers\null\risorse\impostazioni\
default.vrsettings
E imposta:
"enable": true, (l'impostazione predefinita è false)
b.Modifichi il seguente file con un editor di testo:
C:\Programmi (x86)\Steam\steamapps\comune\SteamVR\risorse\impostazioni\
default.vrsettings
E imposta:
"requireHmd": false, (l'impostazione predefinita è true)
"forcedDriver": "null", (il valore predefinito è vuoto "")
"activateMultipleDrivers": true, (l'impostazione predefinita è false)
Chiuda SteamVR e lo riapra.
4.Apra SteamVR e segua le istruzioni per configurare il sistema. Può accettare tutte le impostazioni predefinite se non utilizza una cuffia VR.
5.Abbina un tracker come sonda:
a.Tenga premuto il pulsante di accensione sul Tracker per 2 secondi per accenderlo (la luce del tracker dovrebbe diventare blu per un tracker non accoppiato).
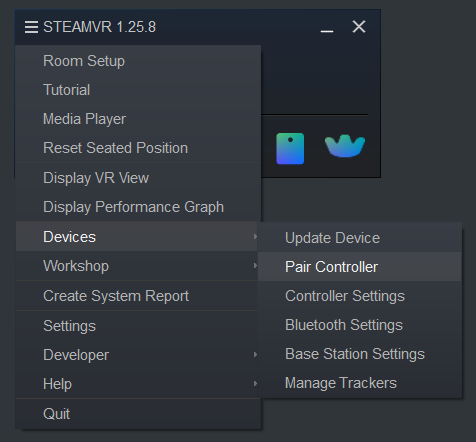
b.Apra il menu➔ Dispositivi➔ Controller di coppia
c.Selezioni l'opzione: HTC ViveTracker. Il tracker dovrebbe essere associato automaticamente e la luce del tracker dovrebbe diventare verde.
Per rimuovere il collegamento, può tenere premuto il pulsante di accensione per 2 secondi e la luce dovrebbe diventare blu (potrebbe lampeggiare).
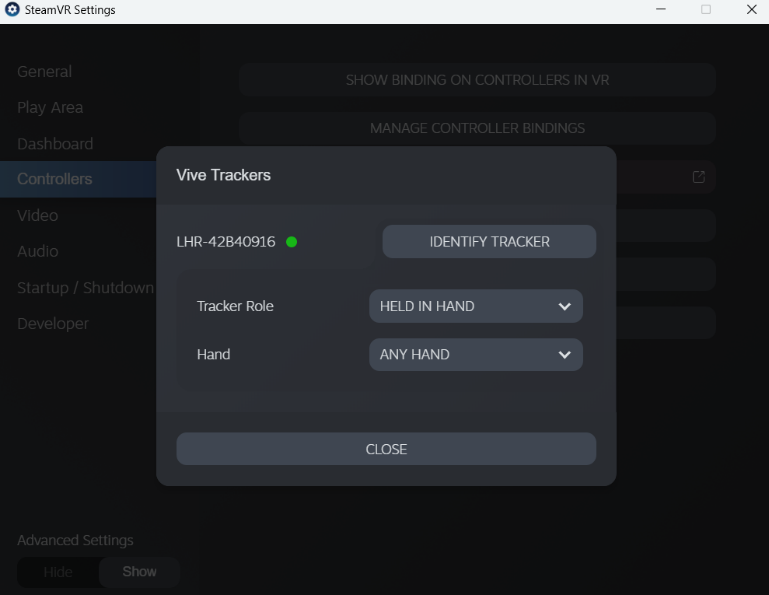
6.Imposta il ruolo del tracker come Tenuto in mano.
a.Selezioni il menu SteamVR➔ Impostazioni
b.Selezionare i controllori
c.Selezioni Gestione inseguitori
d.Set Tracker Ruolo➔ Tenuto in mano
e.Imposta su Qualsiasi mano (impostazione predefinita)
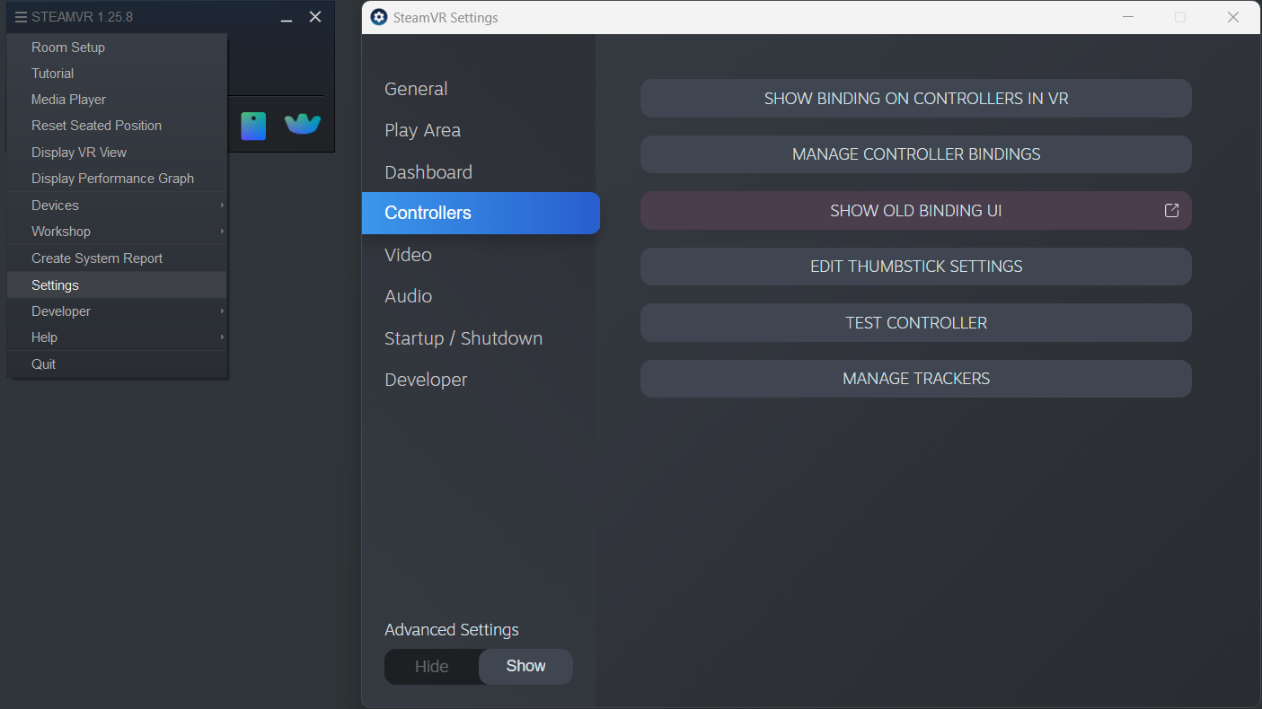
7.Personalizzi i binding del controller:
a.Selezionare le Impostazioni di SteamVR ➔
b.Imposta le impostazioni avanzate➔ Mostra
c.Selezionare i controllori
d.Selezioni Mostra vecchi binding UI
e.Selezionare RoboDK
f.Selezioni il controller corrente e imposti Vive Tracker in Hand (a meno che non sia già impostato).
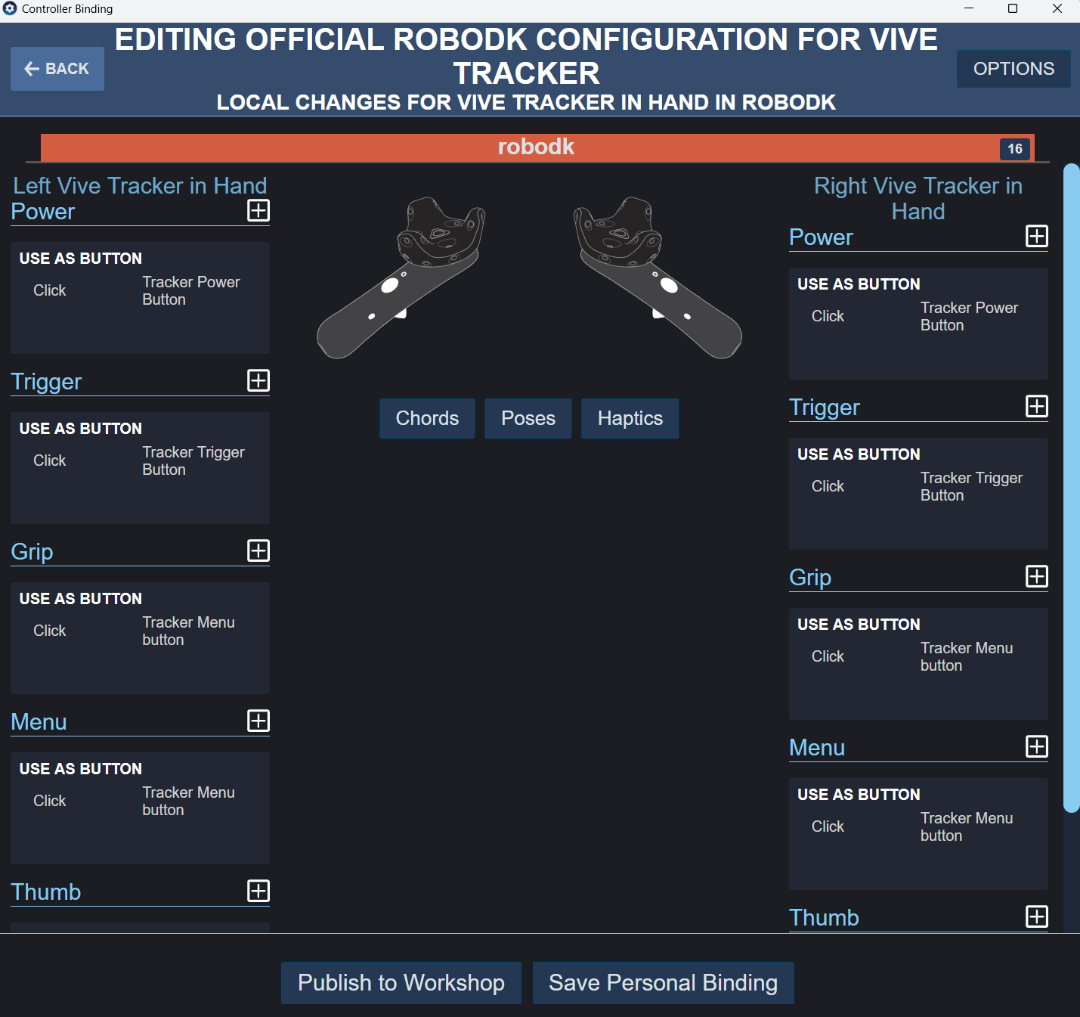
g.Selezioni Modifica nell'abbinamento corrente
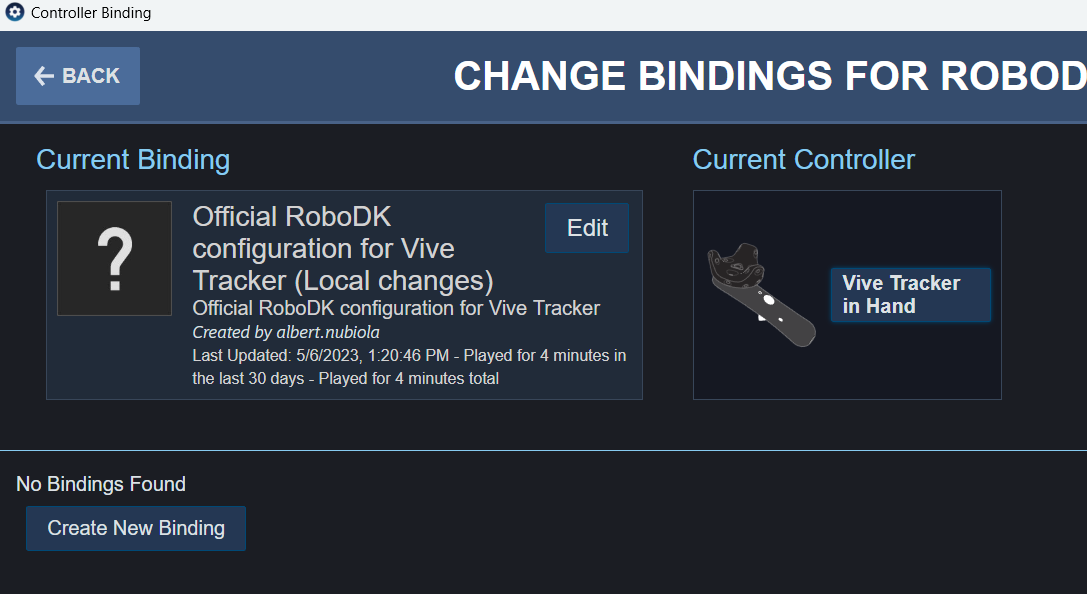
h.Dovrebbe vedere i binding predefiniti per il tracker.
Configurazione
Per utilizzare il sistema TwinTrack, deve caricare il suo robot in RoboDK e collegarsi al robot e al sistema di misurazione. Possiamo opzionalmente modellare la cella aggiungendo i modelli 3D degli oggetti e degli strumenti. Questo aiuterà a prevenire le collisioni.
8.Caricare il robot:
a.Selezioni File➔ Aprire la libreria online. La libreria online verrà visualizzata in RoboDK.
b.Utilizzi i filtri per trovare il suo robot.
c.Selezioni Download per caricare automaticamente il robot nella sua stazione RoboDK.
d.In alternativa, scarichi il file del robot direttamente dalla libreria online (https://robodk.com/library) e apra il file con RoboDK (file .robot).
9.Colleghi il sistema di misurazione:
a.Colleghi il sistema di misurazione al suo computer.
b.Selezioni Connetti e si colleghi al suo sistema di misurazione. Si assicuri che sia installato anche il software necessario. Potrebbe essere necessario l'IP del tracker, a seconda del sistema di misurazione utilizzato.
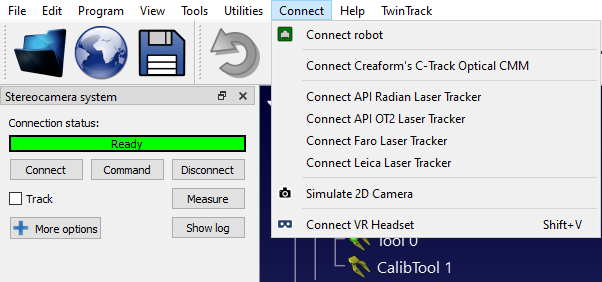
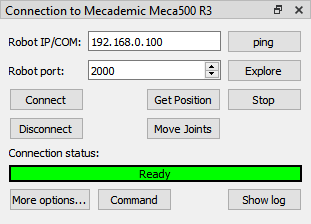
10.Colleghi il robot:
a.Selezioni Collegare➔ Collegare il robot.
b.Inserisca l'IP e la porta del robot.
c.Selezionare Connetti.
Calibrazione del sistema
Questa sezione la guiderà a calibrare il robot e la sonda. Questa fase deve essere eseguita solo una volta, ma è importante per ottenere risultati di buona precisione.
Prima di iniziare la calibrazione, si consiglia di caricare i modelli 3D della sua cella. Questo la aiuterà ad evitare automaticamente le collisioni durante il processo di calibrazione. Se non dispone dei modelli 3D di ogni componente, può semplicemente caricare scatole di piani e sfere per rappresentare le aree a cui non vuole accedere.
Calibrazione robot
Questa sezione descrive come calibrare automaticamente il suo robot utilizzando RoboDK TwinTrack e il suo sistema di misurazione. La calibrazione del robot le consente di migliorare la precisione del robot fino a 0,150 mm quando genera programmi offline o utilizzando gli strumenti TwinTrack teach by demonstration in RoboDK (il livello di precisione dipende molto dalla qualità e dalle dimensioni del robot).
Si consiglia di eseguire la calibrazione del robot dopo aver costruito la cella robotica o dopo aver apportato modifiche importanti (come la modifica del carico utile dell'utensile). Questo aiuta a ottenere la migliore precisione.
Prima di iniziare la calibrazione, può modellare la cella in RoboDK per evitare automaticamente le collisioni. Può utilizzare geometrie di base come piani o cubi per evitare aree indesiderate. Può anche limitare lo spazio dei giunti del robot.
Può selezionare TwinTrack➔ Calibra robot per avviare la procedura di calibrazione del robot.
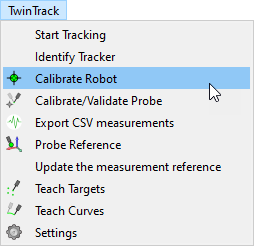
Questa operazione la guiderà nella calibrazione del robot, compresa la generazione automatica di punti per la calibrazione e la convalida. RoboDK può generare automaticamente i punti che sono visibili dal tracker.
La procedura di calibrazione del robot richiede l'esecuzione di circa 200 misurazioni. La procedura inizia prendendo alcune misure intorno alla posizione iniziale del robot
Una volta che la configurazione è pronta e la comunicazione con il robot è stata stabilita correttamente, la procedura di calibrazione dovrebbe richiedere 15-30 minuti.
Il sistema non richiede attrezzature o accessori speciali, ma si limita a tracciare la posizione dell'utensile rispetto al riferimento del tracker.
Non c'è problema se si perdono alcune misurazioni perché i bersagli non sono visibili.
Calibrazione della sonda
È importante calibrare correttamente la punta della sonda e assicurarsi che sia precisa entro le tolleranze desiderate.
La calibrazione della punta della sonda si ottiene muovendo la punta intorno a un punto statico.
Selezioni TwinTrack➔ Calibrate/Validate Probe Tip per avviare la calibrazione dello strumento.
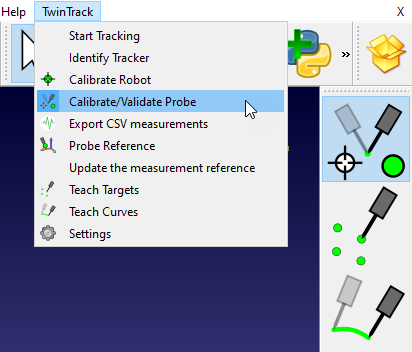
In questo caso, poiché stiamo utilizzando Creaform HandyProbe, è possibile calibrare la sonda con il software Creaform VXElements e convalidarla con RoboDK.
Per convalidare la punta della sua sonda, deve semplicemente spostarsi intorno a un punto statico e RoboDK visualizzerà la precisione.
Programmazione offline
Può utilizzare le funzioni di insegnamento tramite dimostrazione senza un robot reale. Ciò significa che può simulare e programmare il robot offline solo con il suo sistema di misurazione, prima di avere accesso al robot reale.
È sufficiente avere una parte con un sistema di coordinate ben definito da utilizzare come riferimento.
Una volta preparato il sistema di misurazione e il suo pezzo, può seguire questi passaggi per definire il sistema di coordinate del suo dispositivo di misurazione:
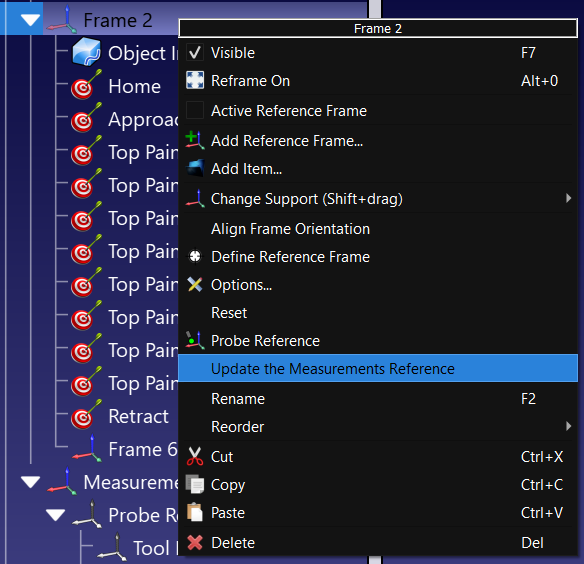
1.Clicchi con il tasto destro del mouse sul sistema di coordinate della sua parte (o sul sistema di coordinate della dima a cui è collegata).
2.Selezioni Aggiorna il riferimento alle misurazioni.
3.Segua le istruzioni sullo schermo per insegnare 3 punti che definiscono il sistema di coordinate: l'origine, un punto su X+ e un punto su Y+.
Il sistema di misurazione verrà aggiornato di conseguenza e lei potrà procedere all'insegnamento di punti, curve o altri sistemi di coordinate.
Insegnare i bersagli
Con RoboDK TwinTrack può creare manualmente i bersagli del robot insegnando i punti con la sonda.
Può avviare la modalità di apprendimento dei bersagli selezionando TwinTrack➔ Insegna i bersagli. Questo pulsante è disponibile anche nella barra degli strumenti TwinTrack per impostazione predefinita.
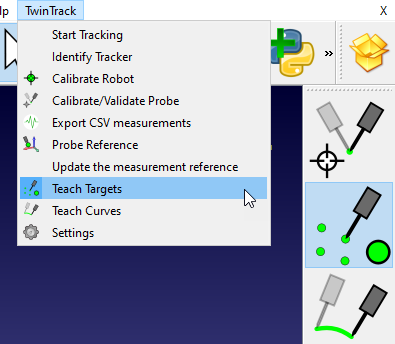
RoboDK calcola e visualizza la posizione del robot in tempo reale in base alla posizione della sua mano. Può vedere facilmente quali aree sono raggiungibili dal suo robot.
Con l'opzione Crea bersagli, insegnerà un bersaglio ad ogni pressione di un pulsante. Quando desidera creare un programma, può premere il secondo pulsante della sua sonda e RoboDK simulerà il programma:
●Primo pulsante: insegnare i bersagli.
●Secondo pulsante: creare e simulare il programma in RoboDK.
●Tenga premuto il secondo pulsante: esegue il programma sul robot.
Insegnare le curve
Con RoboDK TwinTrack può creare percorsi o curve del robot manualmente con la sua sonda.
Può avviare la modalità di apprendimento dei bersagli selezionando TwinTrack➔ Insegna curve. Questo pulsante è disponibile anche nella barra degli strumenti TwinTrack per impostazione predefinita.
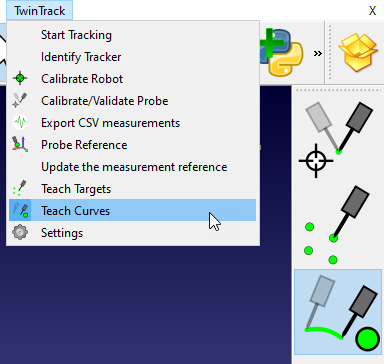
RoboDK calcola e visualizza la posizione del robot in tempo reale in base alla posizione della sua mano. Può vedere facilmente quali aree sono raggiungibili dal suo robot.
Può creare una curva tenendo premuto il primo pulsante della sonda. Quando desidera creare un programma, può premere il secondo pulsante della sonda e RoboDK creerà e simulerà il programma:
●Tenga premuto il primo pulsante: insegna curve/percorsi.
●Secondo pulsante: creare e simulare il programma in RoboDK.
●Tenga premuto il secondo pulsante: esegue il programma sul robot.
Insegnare un sistema di coordinate
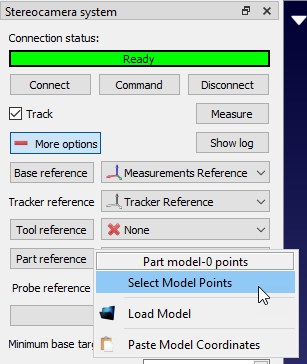
Con RoboDK TwinTrack può sondare e localizzare i sistemi di coordinate (o piani di riferimento) per individuare gli oggetti nell'area di lavoro del robot.
Clicchi con il tasto destro del mouse sul suo sistema di coordinate e selezioni Riferimento sonda.
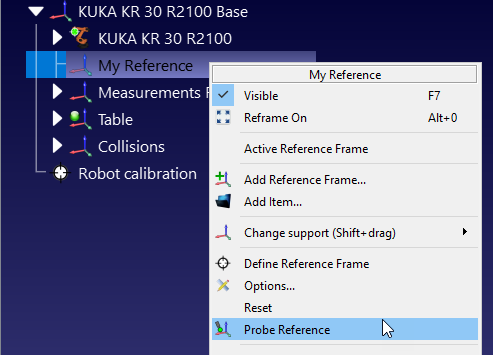
Dovrà quindi sondare 3 punti nel seguente ordine:
1.Primo punto nell'origine.
2.Secondo punto lungo l'asse X positivo.
3.Terzo punto lungo l'asse Y positivo.
Impostando correttamente il sistema di coordinate, può programmare i robot a distanza. Ad esempio, se dispone di un sistema di coordinate correttamente definito, quando desidera programmare un nuovo pezzo può farlo semplicemente dal suo ufficio o da casa, senza doversi avvicinare al robot.
Insegnare le curve in movimento
Può creare curve, bersagli e sistemi di coordinate su un oggetto in movimento, se il suo sistema di misurazione supporta il tracciamento di più oggetti contemporaneamente. Questo può essere fatto seguendo la stessa procedura come se fossero statici.
La differenza principale è che l'oggetto in movimento deve essere tracciato in tempo reale (utilizzando un tracker o bersagli riflettenti). Ad esempio, se utilizza il sistema di misurazione Creaform C-Track, deve specificare il modello nella sezione di riferimento del pezzo e collegarlo al sistema di coordinate che rappresenta.
La dipendenza corretta dei sistemi di coordinate e degli oggetti deve essere definita in RoboDK, in modo da poter definire nuovi sistemi di coordinate rispetto al bersaglio in movimento.
Questo metodo di programmazione dei pezzi potrebbe non essere così preciso come quando i pezzi sono statici.
Impostazioni
Questa sezione descrive le impostazioni di TwinTrack che le permettono di personalizzare meglio il comportamento predefinito delle azioni di TwinTrack.
Selezioni TwinTrack➔ Settings per aprire la finestra delle impostazioni mostrata nell'immagine seguente.
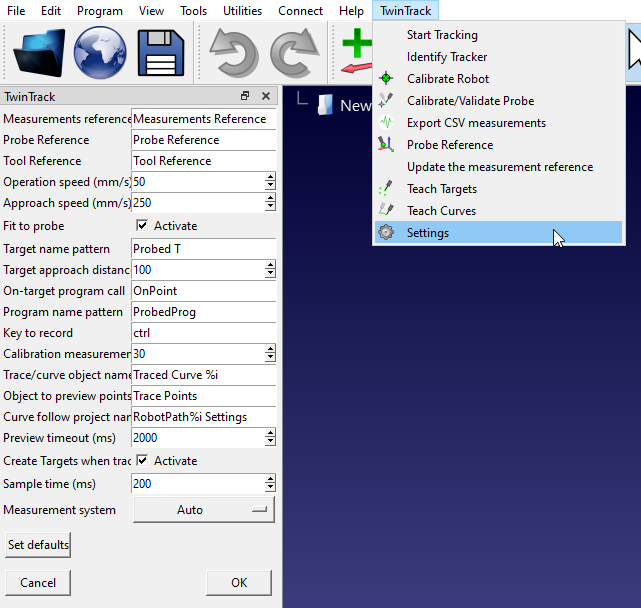
Tra le altre cose, può modificare i nomi predefiniti utilizzati per visualizzare il dispositivo portatile e i piani di riferimento. Può anche personalizzare la velocità di avvicinamento alla distanza di avvicinamento.
Filtraggio dei programmi
Una volta che il robot è stato calibrato, dobbiamo assicurarci di generare programmi filtrati o di tenere conto dei parametri calibrati del robot per assicurarci di trarre vantaggio dalla calibrazione del robot.
Dobbiamo seguire uno e uno solo dei seguenti metodi per programmare i robot in modo accurato dopo la calibrazione:
1.Utilizzi RoboDK per la programmazione offline per generare programmi accurati (i programmi generati sono già filtrati). Questa è l'opzione di programmazione offline consigliata per ottenere risultati di precisione ottimali.
2.Calibrare i parametri del controllore del robot (come le lunghezze dei collegamenti, i parametri DH-DHM e/o i parametri di masterizzazione).
Programmazione offline accurata
Quando un robot è stato calibrato con RoboDK, abbiamo l'opzione di attivare la cinematica accurata facendo clic con il pulsante destro del mouse sul robot e selezionando Usa cinematica accurata.
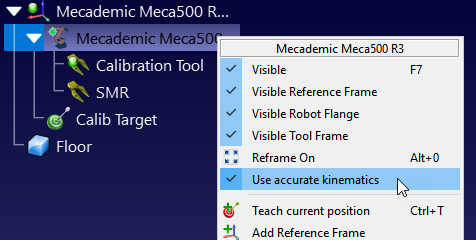
Se la precisione è attiva, vedremo un punto verde, se non è attiva, vedremo un punto rosso.
Questa è l'opzione consigliata per ottenere risultati di precisione ottimali. Con l'opzione di precisione del robot attivata in RoboDK, tutti i programmi generati da RoboDK saranno automaticamente filtrati. Ciò significa che tutte le coordinate cartesiane saranno leggermente modificate per compensare gli errori del robot.
Questa è l'opzione più adatta se intende utilizzare i suoi robot per la fresatura robotizzata, programmare i robot da file NC o utilizzare uno dei plugin CAD/CAM supportati da RoboDK.
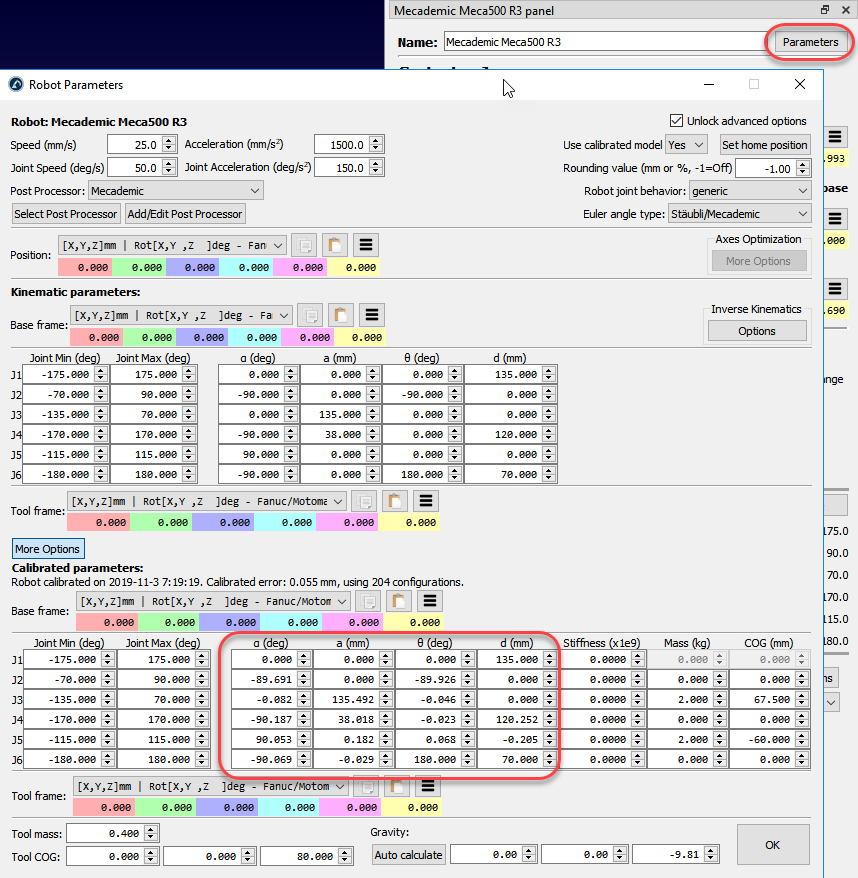
Calibrare i parametri del robot
Può accedere ai parametri calibrati nel menu Parametri, una volta che il robot è stato calibrato. Alcuni controllori di robot consentono di modificare alcuni parametri del robot.
Quadro di riferimento e quadro utensile
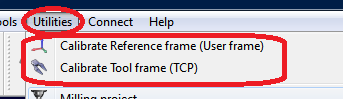
RoboDK fornisce alcune utilità per calibrare i piani di riferimento e i telai degli strumenti. Questi strumenti sono accessibili rispettivamente da Utilità➔ Calibrare il quadro di riferimento e da Utilità➔ Calibrare il quadro strumenti.
Per calibrare un piano di riferimento o un utensile che non è stato calibrato automaticamente (noti anche come piano utente e TCP rispettivamente), abbiamo bisogno di alcune configurazioni del robot che toccano 3 o più punti; queste configurazioni del robot possono essere valori dei giunti o coordinate cartesiane (con dati di orientamento in alcuni casi). Si consiglia di utilizzare i valori dei giunti invece delle coordinate cartesiane, in quanto è più facile controllare la configurazione reale del robot in RoboDK (copiando e incollando i giunti del robot nella schermata principale di RoboDK).
Calibrazione dell'utensile
Selezioni lo strumento Utilità➔ Calibra per calibrare il TCP utilizzando RoboDK. Possiamo usare il numero di punti desiderato, utilizzando orientamenti diversi. Un numero maggiore di punti e variazioni di orientamento più ampie è meglio, in quanto otterremo una stima migliore del TCP e una buona stima dell'errore del TCP.
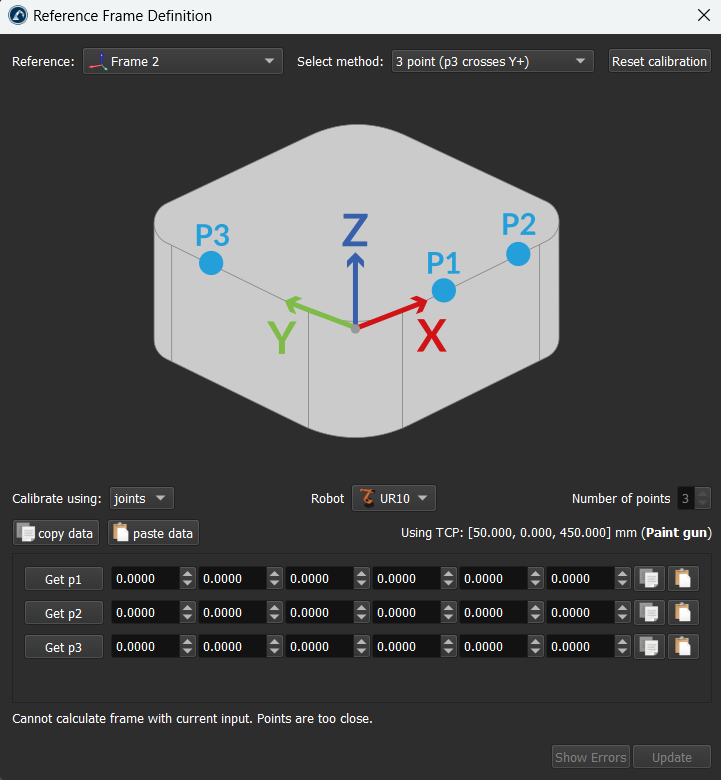
Calibrazione dei piani di riferimento
Selezioni Utilità➔ Calibra riferimento per calibrare un quadro di riferimento. È possibile impostare un quadro di riferimento utilizzando diversi metodi. Nell'esempio della figura, un quadro di riferimento è definito da tre punti: i punti 1 e 2 definiscono la direzione dell'asse X e il punto 3 definisce l'asse Y positivo.
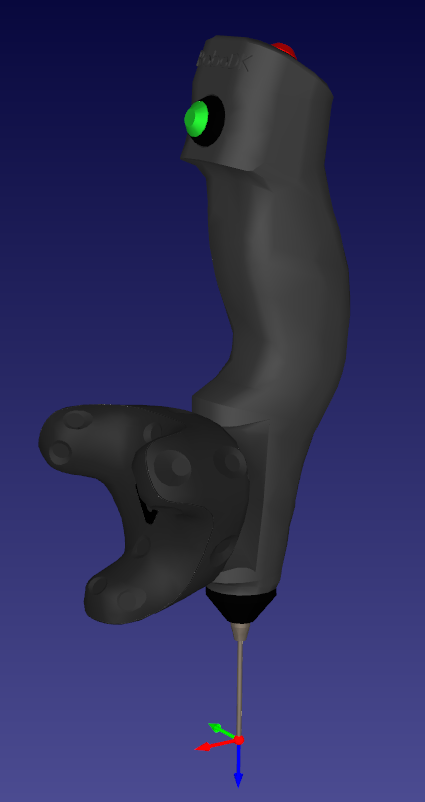
Sonda TwinTrack personalizzata
Questa sezione mostra come può costruire la sua sonda TwinTrack personalizzata per insegnare ai robot mediante dimostrazione. Una sonda personalizzata le permette di far imitare ai suoi robot le operazioni di produzione insegnate da un umano.

Componenti hardware
Il seguente elenco di componenti hardware le consente di costruire una sonda personalizzata da utilizzare con RoboDK TwinTrack.
1.Un HTC Vive Tracker (qualsiasi versione supportata, consigliata la 3.0): HTC Vive Tracker 3 Su Amazon. Prezzo stimato: 200 euro.

2.Due stazioni base Valve Index. In realtà qualsiasi versione dovrebbe funzionare, purché sia compatibile con il corrispondente HTV Vive Tracker. Stazioni base Valve su Amazon. Prezzo stimato: 500 euro per entrambe le unità.

3.Due treppiedi per le stazioni base Valve. Un campione di pezzi su Amazon. Prezzo stimato: 100 euro.

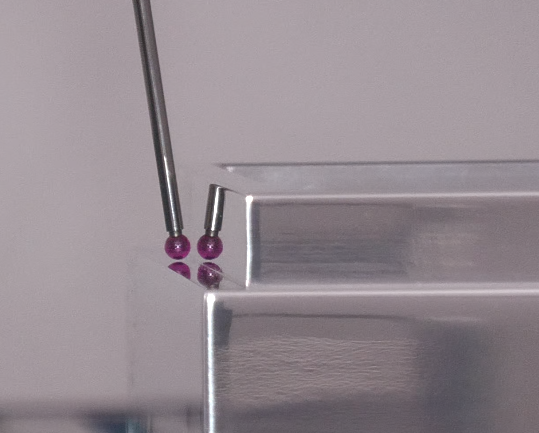
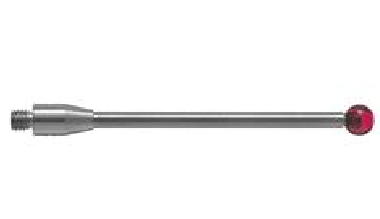
4.Una sfera di rubino Renishaw di 40 mm di lunghezza e 4 mm di diametro. Come il modello A-5003-0060. Prezzo stimato: 80 euro.
5.Due interruttori a pulsante, uno rosso e uno verde, diametro 12 mm. Premendo il pulsante si accende (chiude il circuito), rilasciando il pulsante si spegne (circuito aperto): Esempio di prodotto su Amazon. Prezzo stimato: 15 euro.

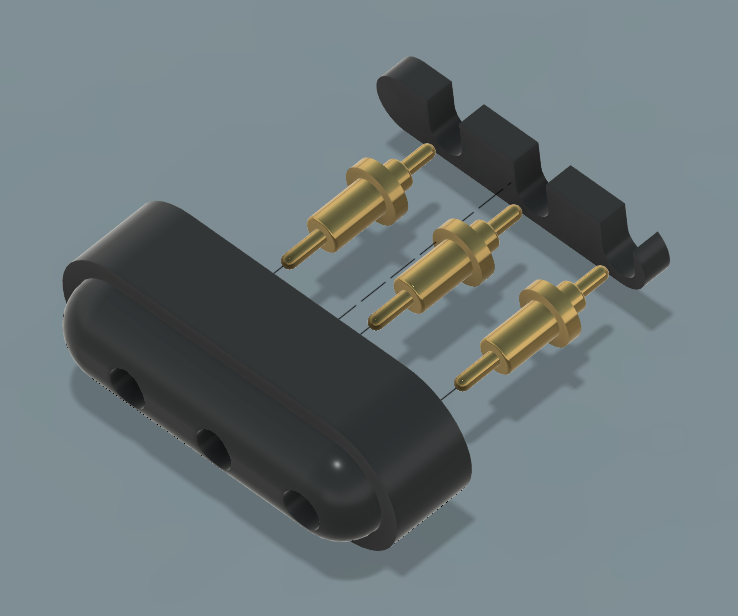
6.Tre perni pogo a molla 0856-0-15-20-82-14-11-0 (3 unità). Prodotto campione di DigiKey. Prezzo stimato: 20 EUR.

7.Filo elettrico per collegare gli interruttori (meno di 1m). Esempio di ordine su Amazon. Prezzo stimato: 25 euro.

8.Una vite a testa cilindrica ¼-20 x 1": Prodotto campione su Amazon aperto. Prezzo stimato: 10 EUR.

9.Cinque parti stampate in 3D, il corpo principale, il supporto della sonda, la sonda superiore, il connettore del tracker e il cappuccio del connettore. Può scaricare le parti stampate in 3D necessarie per costruire la sonda TwinTrack qui. Le parti stampate in 3D della sonda TwinTrack sono disponibili anche su GrabCad e Thinginverse.


Gruppo sonda
Questa sezione spiega come può assemblare la sonda per RoboDK TwinTrack. Avrà bisogno delle parti necessarie per costruire la sonda descritta nella sezione precedente. Avrà anche bisogno di un kit di saldatori.
Segua questi passaggi per assemblare la sonda:
1.Assembli il connettore come segue e incolli i pezzi stampati.
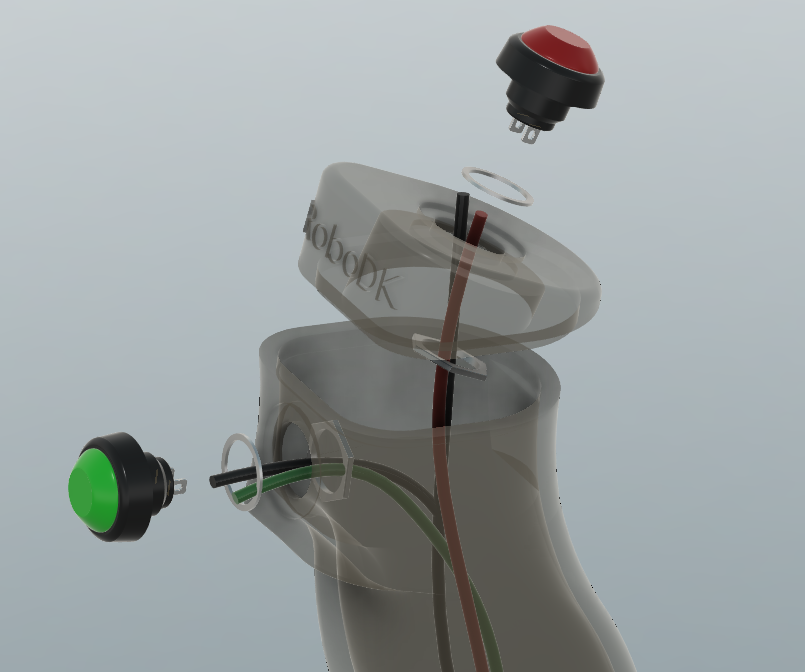
2.Installi i fili all'interno del corpo principale e attraverso il pezzo superiore, come mostrato nella seguente immagine. Notare che il filo di terra è collegato ad entrambi gli interruttori.
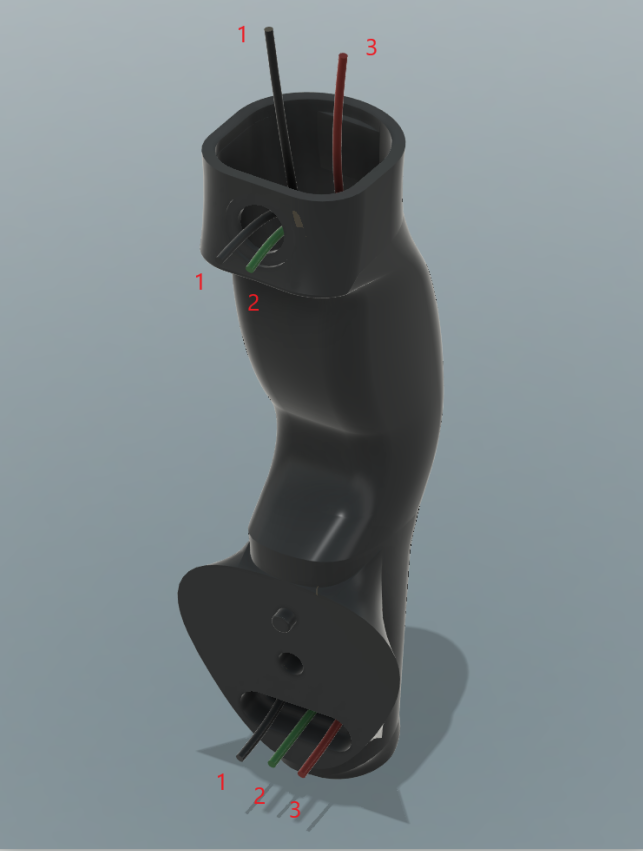
3.Colleghi i fili agli interruttori. Le 2 coppie di fili devono passare attraverso i dadi degli interruttori. Inoltre, il filo dell'interruttore rosso deve passare attraverso la parte superiore. Dovrà poi saldare gli interruttori (in quest'ordine).
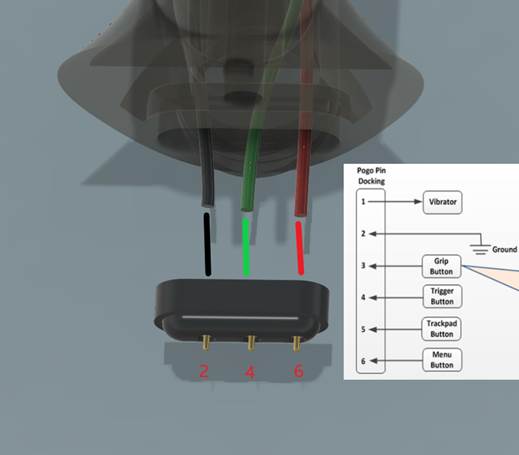
4.Saldi il connettore ai fili corretti. Si assicuri di posizionare i cavi sui connettori giusti.
5.Assembli il resto della sonda come mostrato nella seguente immagine.
