コントローラー
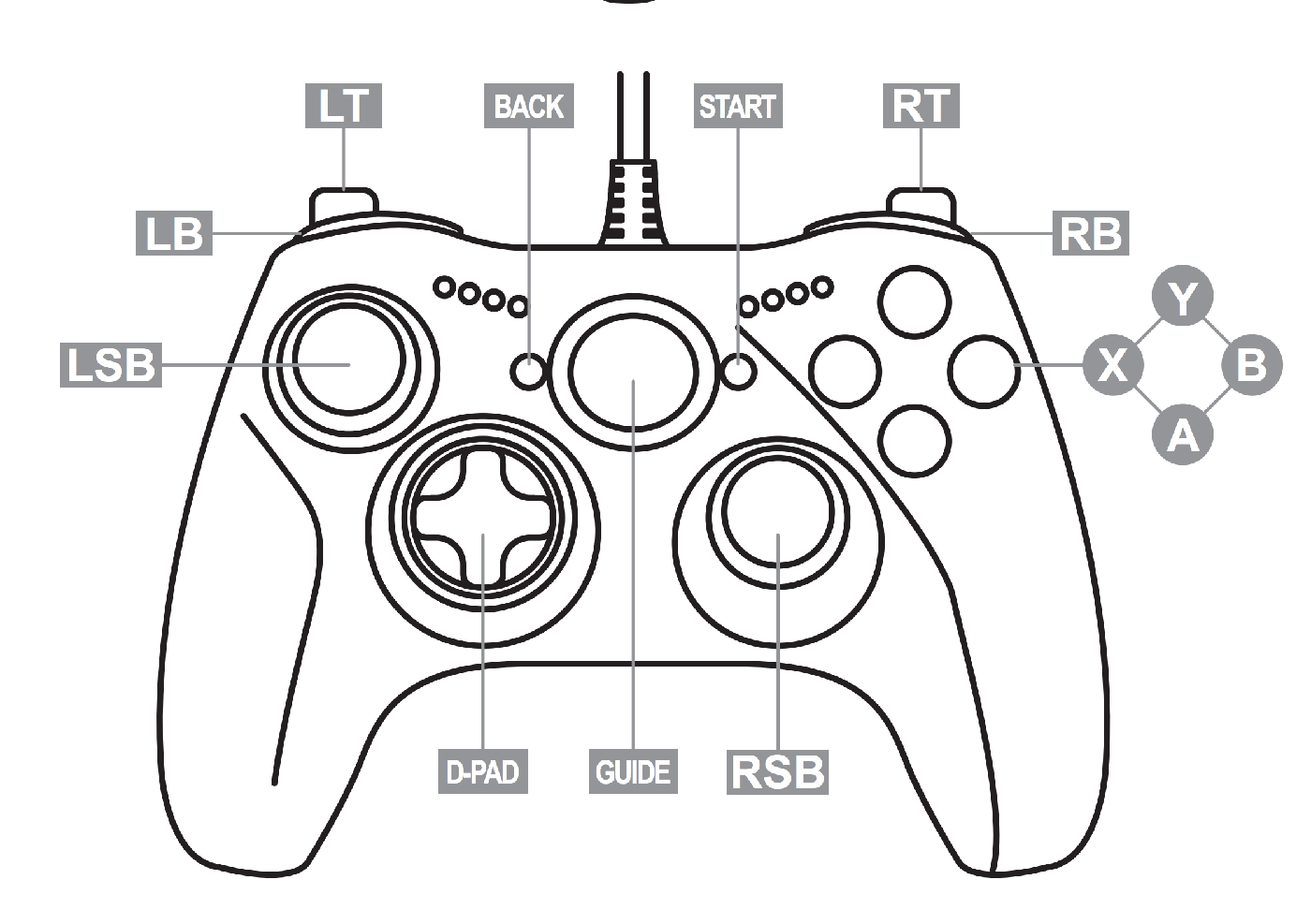
まず、RoboDKを使用しているデバイスにコントローラーを接続してください。このアドインは、特定のロボットの動作や設定を標準的なゲームパッドの入力にマッピングします。デフォルトのマッピングは、Xbox Oneコントローラー用に作成されています。
注:ゲームコントローラーアドインは、複数のコントローラーに対応しています。また、RoboDKドライバーを使用して、実際のロボットをジョグ操作することも可能です。
動作制御
ツールバーの「ゲームコントローラーを起動」アイコンをクリックするか、「接続」→「ゲームコントローラー」→「ゲームコントローラーを起動」を選択してください。これによりアドインが起動し、接続されたコントローラーを自動的に検出しようとします。「ゲームコントローラーを起動」アイコンをもう一度クリックすると、アドインを停止できます。
注:ステータスの更新情報は、画面下部に表示されるRoboDKのステータスバーで確認できます。
ロボットを動かすには、軸を選択し、Dパッドを使用して移動操作を行う必要があります。
1.X軸を選択:コントローラーのXボタンを長押ししてください。
2.Y軸の選択:コントローラーのYボタンを長押ししてください。
3.Z軸の選択:コントローラーのBボタンを長押ししてください。
4.移動:軸ボタンを押したまま、Dパッドの上または下を押して、選択した軸に沿ってロボットを移動させます。
トグル
Game Controller アドインには、動作をカスタマイズするためのトグルボタンがいくつか用意されています。
ロボットの動きを操作するためのその他のオプションには、次のようなものがあります:
1.並進と回転:左スティックボタン(LSB)を押すと、ロボットの平行移動(mm)と回転(deg)を切り替えることができます。デフォルトでは平行移動(mm)が使用されます。
2.MoveJ 対 MoveL:右スティックボタン(RSB)を押すと、関節移動(MoveJ)と直線移動(MoveL)を切り替えることができます。デフォルトの移動命令は MoveJ です。
3.ステップサイズ:Dパッドの左右を使用して、移動ステップの増分(単位)を小さくしたり大きくしたりできます。
4.ホームポジション:セーフガードを有効にした状態で、両バンパー(LB + RB)を同時に押すと、ロボットがホームポジションに戻ります。