Game Controller
ゲームコントローラ・アドインの概要
RoboDK用ゲームコントローラ・アドインは、標準的なゲームパッド(Xboxコントローラなど)を使用してロボットを手動で操作できるように設計された効率的な工具です。このアドインは、ターゲットの迅速なティーチング、ロボットの到達範囲のテスト、あるいはシミュレーション環境や実環境でロボットの動きを実演するのに最適です。
インストール
Game Controller Add-inは、RoboDKオンラインライブラリからインストールできます。また、RoboDKソフトウェア自体からインストールする場合は、「ツール」→「アドインマネージャ」を選択し、Game Controller Add-inを有効にしてください。
注:2番目の方法は、一部の古いバージョンのソフトウェアでは機能しない場合があります。最新バージョンがインストールされていることをご確認ください
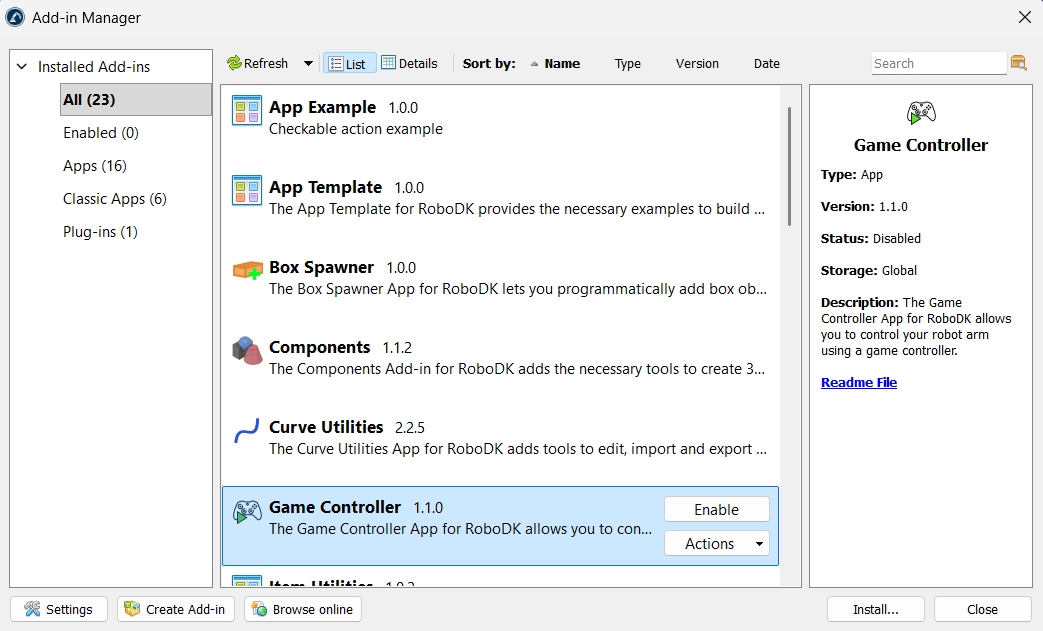
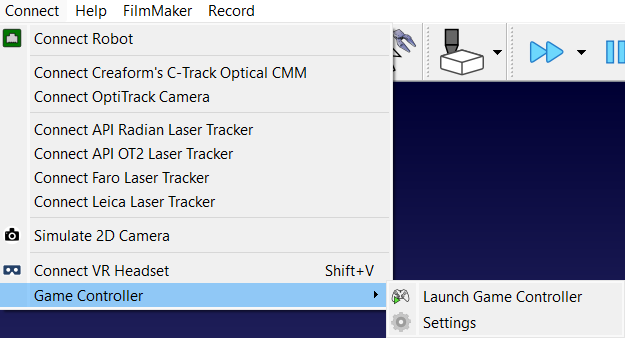
インストール後、「Game Controller」のオプションは「Connect」メニューからアクセスできます。また、ツールバーには「Game Controllerを起動」アイコンが表示されます。
コントローラー
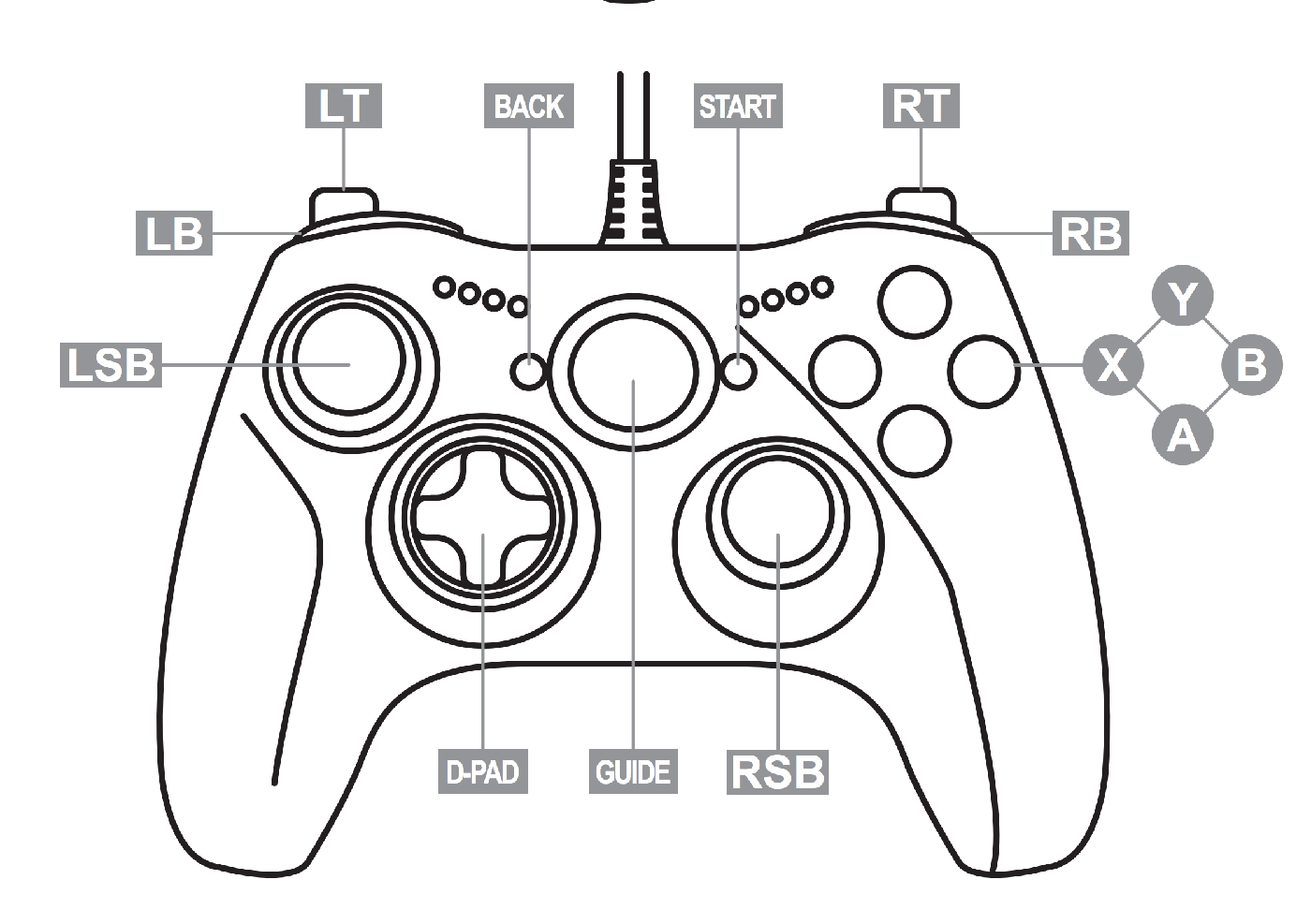
まず、RoboDKを使用しているデバイスにコントローラーを接続してください。このアドインは、特定のロボットの動作や設定を標準的なゲームパッドの入力にマッピングします。デフォルトのマッピングは、Xbox Oneコントローラー用に作成されています。
注:ゲームコントローラーアドインは、複数のコントローラーに対応しています。また、RoboDKドライバーを使用して、実際のロボットをジョグ操作することも可能です。
動作制御
ツールバーの「ゲームコントローラーを起動」アイコンをクリックするか、「接続」→「ゲームコントローラー」→「ゲームコントローラーを起動」を選択してください。これによりアドインが起動し、接続されたコントローラーを自動的に検出しようとします。「ゲームコントローラーを起動」アイコンをもう一度クリックすると、アドインを停止できます。
注:ステータスの更新情報は、画面下部に表示されるRoboDKのステータスバーで確認できます。
ロボットを動かすには、軸を選択し、Dパッドを使用して移動操作を行う必要があります。
1.X軸を選択:コントローラーのXボタンを長押ししてください。
2.Y軸の選択:コントローラーのYボタンを長押ししてください。
3.Z軸の選択:コントローラーのBボタンを長押ししてください。
4.移動:軸ボタンを押したまま、Dパッドの上または下を押して、選択した軸に沿ってロボットを移動させます。
トグル
Game Controller アドインには、動作をカスタマイズするためのトグルボタンがいくつか用意されています。
ロボットの動きを操作するためのその他のオプションには、次のようなものがあります:
1.並進と回転:左スティックボタン(LSB)を押すと、ロボットの平行移動(mm)と回転(deg)を切り替えることができます。デフォルトでは平行移動(mm)が使用されます。
2.MoveJ 対 MoveL:右スティックボタン(RSB)を押すと、関節移動(MoveJ)と直線移動(MoveL)を切り替えることができます。デフォルトの移動命令は MoveJ です。
3.ステップサイズ:Dパッドの左右を使用して、移動ステップの増分(単位)を小さくしたり大きくしたりできます。
4.ホームポジション:セーフガードを有効にした状態で、両バンパー(LB + RB)を同時に押すと、ロボットがホームポジションに戻ります。
安全機能
このアドインには、不意の動作を防ぐための必須の安全機構が組み込まれています。
意図しない動作には、以下のものが含まれます:
1.セーフガードトリガー:ロボットを動かすには、右トリガー(RT)を押し続ける必要があります。トリガーを離すと、ロボットは動かなくなり、アプリに次のメッセージが表示されます:
安全トリガーを押してください!
2.構成に関する警告:スクリプトは、新しい動作によってロボットの構成(例:手首の反転)に変更が生じるかどうかを確認します。変更が検出された場合、その動作はブロックされ、予期しない動作を防ぐために以下の警告が表示されます:
ロボットの構成が変更されました。これにより予期せぬ動作が発生する可能性があります!RoboDKを使用してロボットを操作するか、別のコマンドをお試しください。
3.到達可能性チェック:システムは逆運動学(IK)を使用して動作を検証します。ターゲットが到達範囲外にあるか、特異点に近い場合、以下のメッセージが表示されます:
ターゲットに到達できません。MoveJ または別のコマンドをお試しください。
ロボット解が見つかりません!新しい位置が遠すぎ、到達範囲外、または特異点に近い状態です。
デバイスおよびロボットの操作
このアドインには、ステーション内の複数のデバイスやロボットを管理するためのロジックが含まれています:
1.複数のコントローラ:PCに複数のコントローラが接続されている場合、アドインは複数のコントローラが検出されたことを示すメッセージを表示し、最初に検出されたコントローラをデフォルトで使用します。
2.複数のロボット:ステーション内に複数のロボットが存在する場合、アドインはリストから「ロボットを選択」するようユーザーに促します。ロボットが1台のみの場合、ユーザーに確認することなく自動的に選択されます。
注:コントローラーが見つからない場合、または動作中にコントローラーとの接続が切断された場合、アドインはメッセージを表示して終了します。同様に、ステーション内にロボットが存在しない場合は、プログラムを実行する前にロボットをロードする必要があります。
シミュレーション対実ロボット
このアドインは、オフラインシミュレーションと実機ロボット制御の両方に使用できます:
1.シミュレーションモード:RoboDKステーション内で安全に動作をテストするためのデフォルトモードです。
2.実ロボットモード:物理的なロボットを駆動するには、「Connect-Connect Robot」経由で接続してください。アドインは、シミュレーションモードのままにするか、実ロボットで実行するかを確認します。「はい」をクリックすると、ロボットのIPアドレスの入力が求められますので、入力後に「接続」をクリックしてください。
注:操作を進める前に、ロボットパラメータでロボットの速度が安全なレベルに設定されていることを確認してください。
注:コントローラが見つからない場合、または動作中にコントローラとの接続が切断された場合、アドインはメッセージを表示して終了します。同様に、ステーション内にロボットが存在しない場合は、プログラムを実行する前にロボットをロードする必要があります。
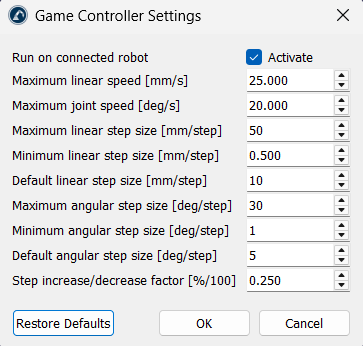
設定
カスタマイズ用の追加設定は、「Connect-Game Controller-Settings」で確認できます。