IsaacSim Bridge
このセクションでは、IsaacSimにおけるIsaacSim Bridgeアドインの基本機能についてご説明いたします。
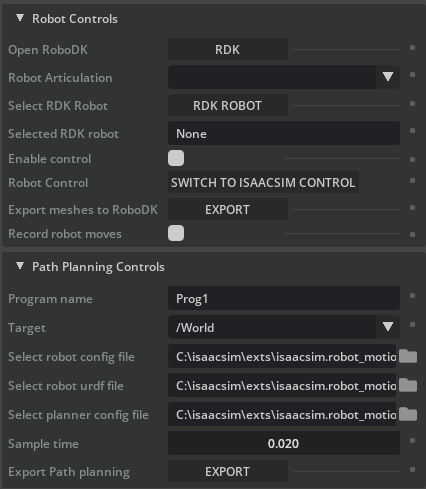
IsaacSim Bridge Extensionウィンドウには、以下の機能要素が含まれています:
1.ロボット制御
a.RoboDKを開く:RoboDKが起動していない場合は起動し、起動済みの場合は現在実行中のRoboDKインスタンスに接続します。この機能は拡張機能が動作するために必要です。
b.ロボット関節:IsaacSim内で使用する関節を選択します。
c.RDKロボットの選択:RoboDKステーション内で使用するロボットを選択します。
d.選択済みRDKロボット:選択されたロボットの名前を表示します。
e.制御を有効化:IsaacSimシーンとRoboDKステーション間のロボット通信を有効にします。
f.ロボット制御:照合対象として使用する基準ロボットを選択します。オプションに「IsaacSim制御に切り替える」と表示されている場合、RoboDKがマスターとして動作し、IsaacSim内のロボット関節は選択したRoboDKロボットのポーズに従います。
g.メッシュをRoboDKへエクスポート:IsaacSimシーン内のメッシュオブジェクトを3Dメッシュファイルに変換し、RoboDKステーションへ読み込みます。変換後のオブジェクトの原点はステーションのベース位置に設定されますが、IsaacSimシーン内の位置と一致するようオフセットされます。IsaacSimの各メッシュオブジェクトはRoboDKステーション内で独立したオブジェクトとなり、自由に移動させることが可能です。
h.ロボット動作の記録:IsaacSimロボットが行ったすべての動作を記録し、RoboDK内のプログラムに追加します。IsaacSim内のプログラムをRoboDKにエクスポートしたい場合に便利です。
2.パス計画の制御
a.プログラム名:RDKへエクスポートする際に使用するプログラム名です。
b.ターゲット:RRTパス計画のターゲットとして使用するXFormsのドロップダウンメニューです。
c.ロボット設定ファイルの選択:パス計画に使用するロボット設定ファイルを選択します。ファイル形式はyamlである必要があります。
d.ロボットURDFファイルの選択:パス計画に使用するロボット定義ファイルを選択します。ファイル形式はURDFである必要があります。
e.プランナー設定ファイルの選択:パス計画に使用するプランナー設定ファイルを選択します。ファイル形式はyamlである必要があります。
f.サンプリング時間:パス生成時に使用するサンプリング時間を選択します。サンプリング時間が短いほど、プログラム内のMoveJ命令数が増加し、各命令間のステップ幅が小さくなります。
g.経路計画のエクスポート: RRTを用いて現在のロボットポーズと選択したターゲット間のパスを計算し、パスを完了する命令リストを含むロボットプログラムを作成します。