ターンテーブル(
フランジ半径、サイドおよび水平オフセット、高さ、ベース、ビーム、フランジの色などのパラメータを指定して、3軸ポジショナを作成できます。
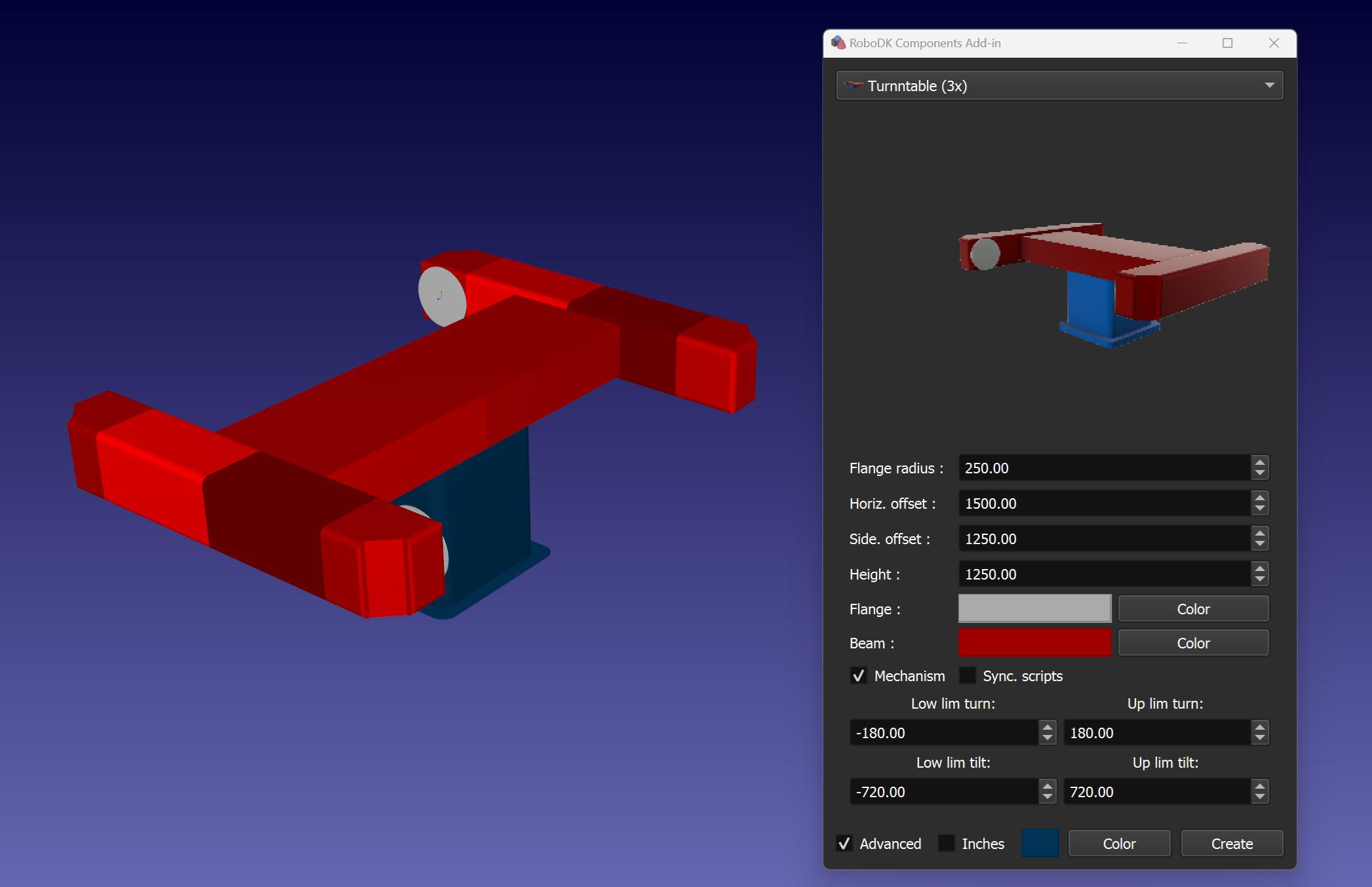
ヒント:3 軸ポジショナ機構を作成するには、Mechanism チェックボックスを使用します。さらに、対応するパラメータでモーションリミットを設定できます。
ヒント:Sync.scripts チェックボックスを使用して、対応するスクリプトを実行することで、ロボットを必要な水平軸と同期させる追加の Python スクリプトを作成します。
注意:デフォルトでは、同期スクリプトのサンプルが格納されているフォルダはC:㊦RoboDKAdd-in です。