コンポーネントアドイン
RoboDK 用コンポーネントアドインは、RoboDK ソフトウェアでビジュアルコンポーネント(3D オブジェクトや機構)を作成するために必要なツールを追加します。
RoboDK コンポーネントアドインでは、作成したコンポーネントの寸法や設定パラメータを定義することもできます。プレビュー機能により、作成結果が正しいかどうかを確認することができます
作成するコンポーネントには、任意の色と透明度を設定できます。
ビデオRoboDK コンポーネントAdd-in のデモ: https://youtu.be/-e0881ENk9g.
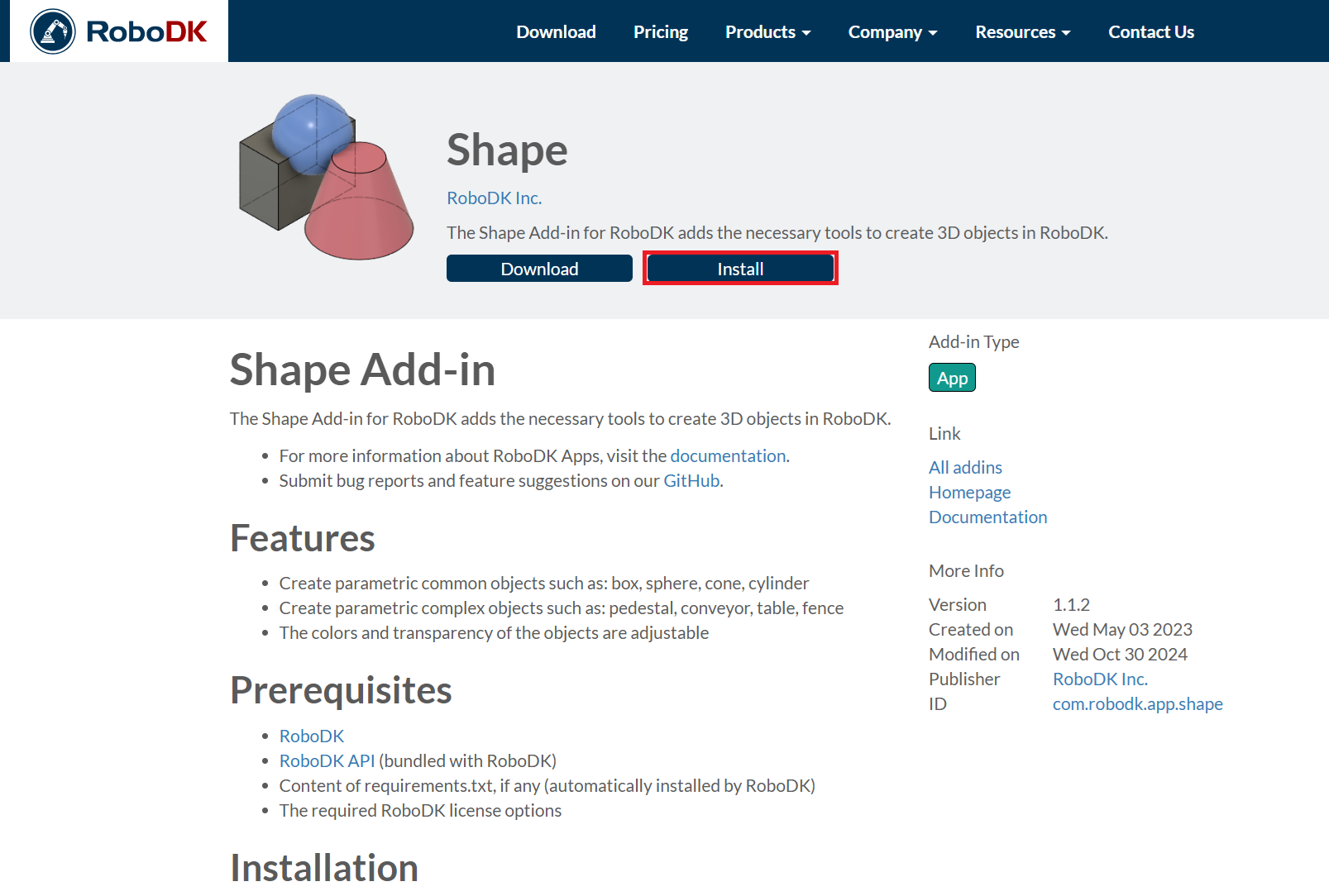
RoboDK Components アドインはライブラリの Add-in セクションhttps://robodk.com/addin/com.robodk.app.shape にあります。
注意: 初めてRoboDKをお使いになる方は、この入門ガイドをお読みください。
注:このアドインは、Shape Add-inからComponents Add-inに名称変更されました。
インストール
RoboDKオンラインライブラリからコンポーネントアドインをインストールしてください。RoboDKソフトウェアのデフォルトでは、コンポーネントアドインは有効になっていません。
コンポーネント
このセクションでは、Components Add-In の基本的な機能について説明します。
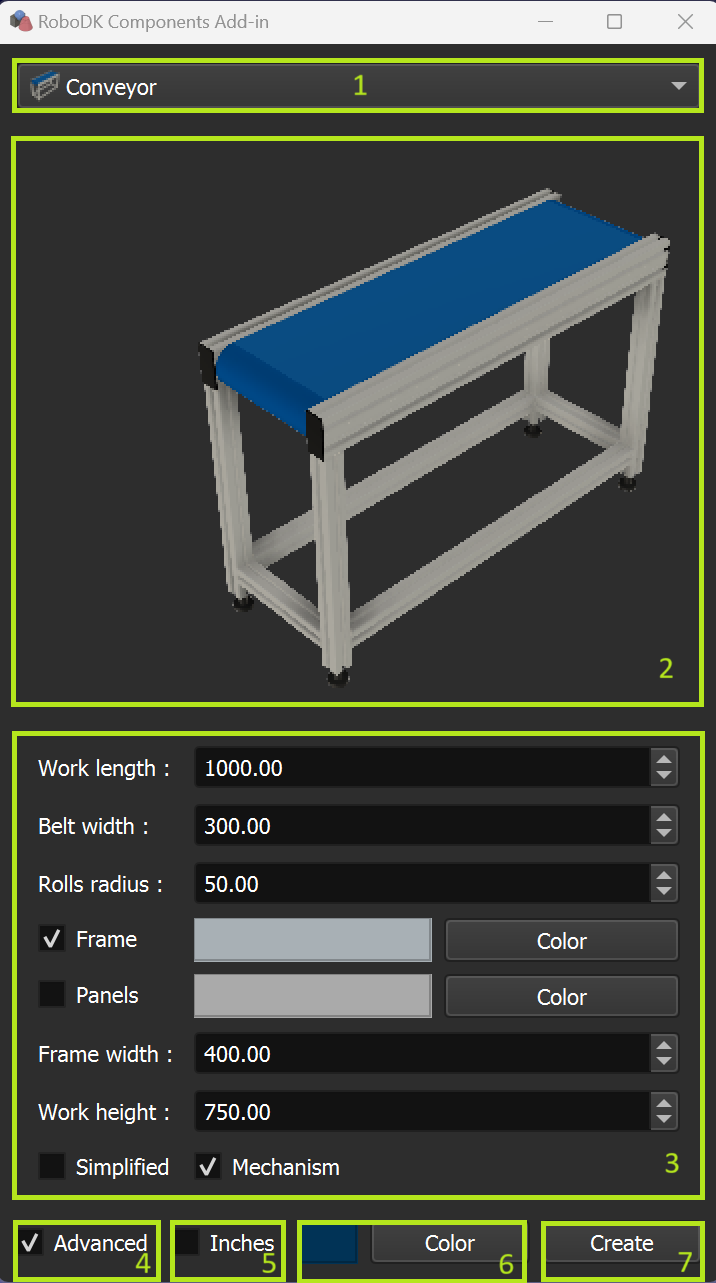
コンポーネントアドインウィンドウには、以下の機能要素があります:
1.コンポーネント選択用リストエリア
2.部品スケッチ
3.選択されたコンポーネントのパラメータ領域
4.詳細オプションの表示チェックボックス
5.インチを使用するチェックボックス(デフォルトはミリメートル)
6.色と透明度の選択
7.コンポーネントの作成
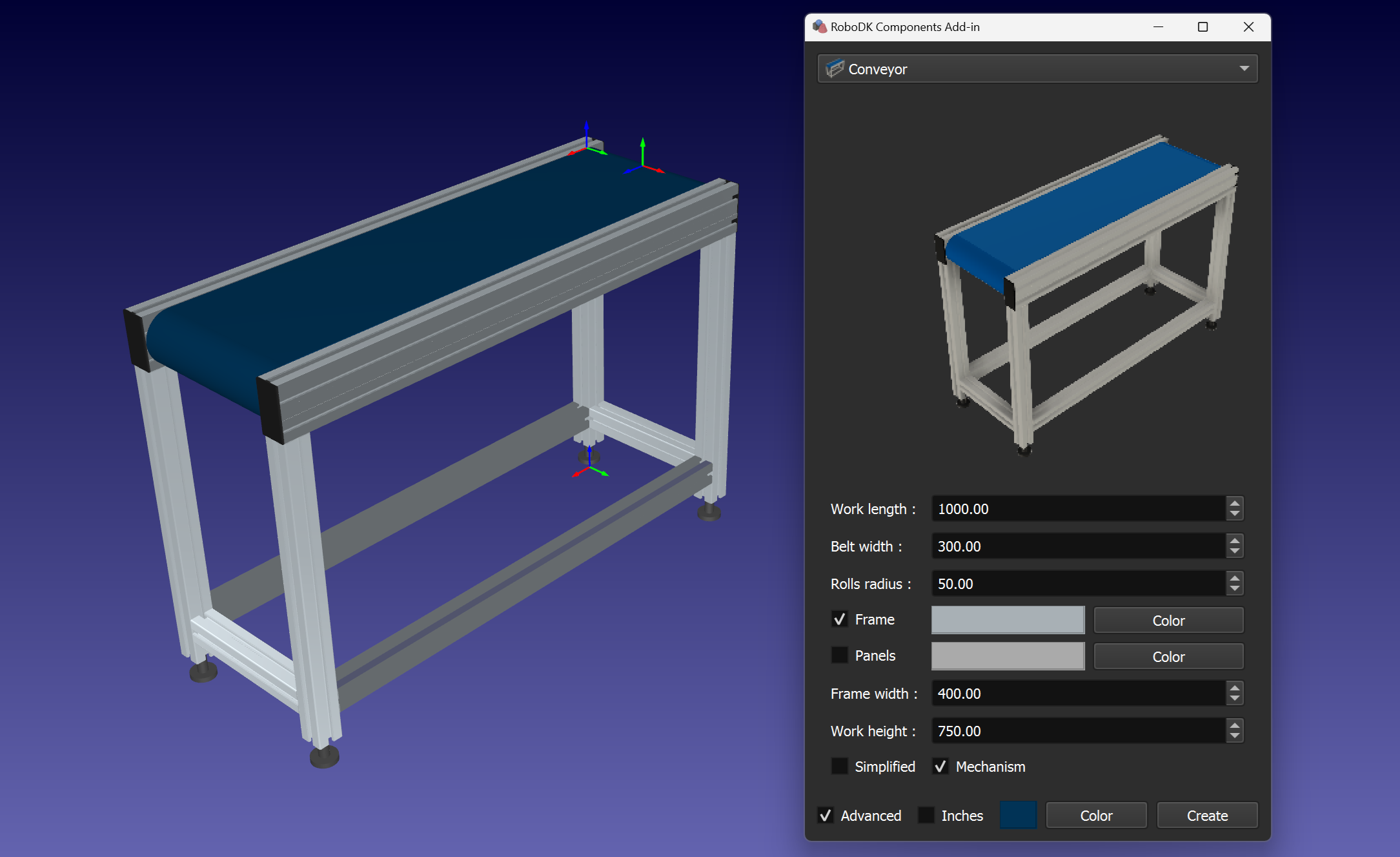
コンベア
コンベアの寸法を指定して、コンベアを作成することができます。
台座
寸法(R1、R2、R3、H1、H2、H3)を指定して台座を作成できます。
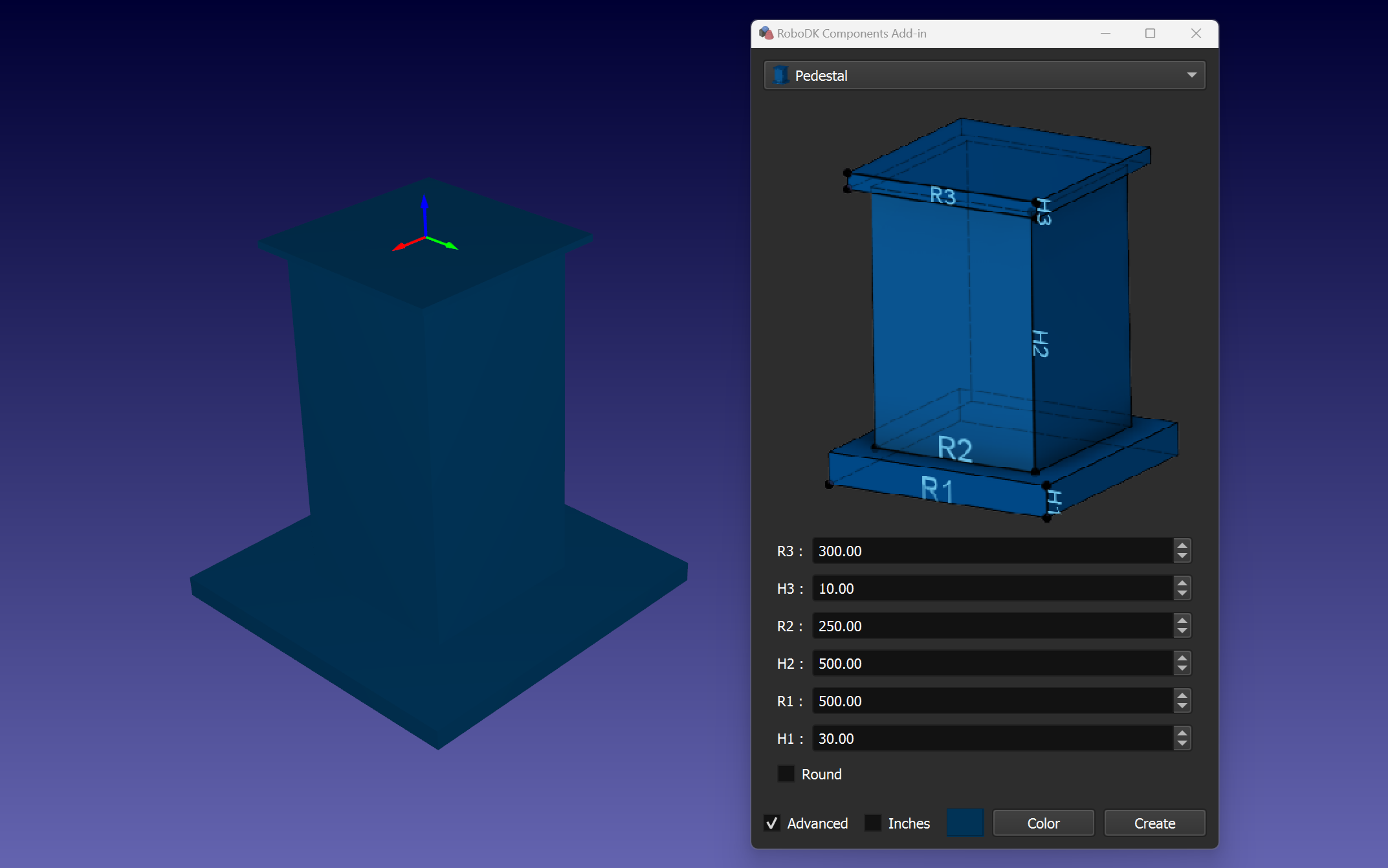
ヒント台座N平面フレームという追加で作成したフレームは、必要なオブジェクトを地下室の上部平面の中央に配置するのに便利です。
テーブル
寸法(X、Y、R、H1、H2)を指定して表を作成できます。
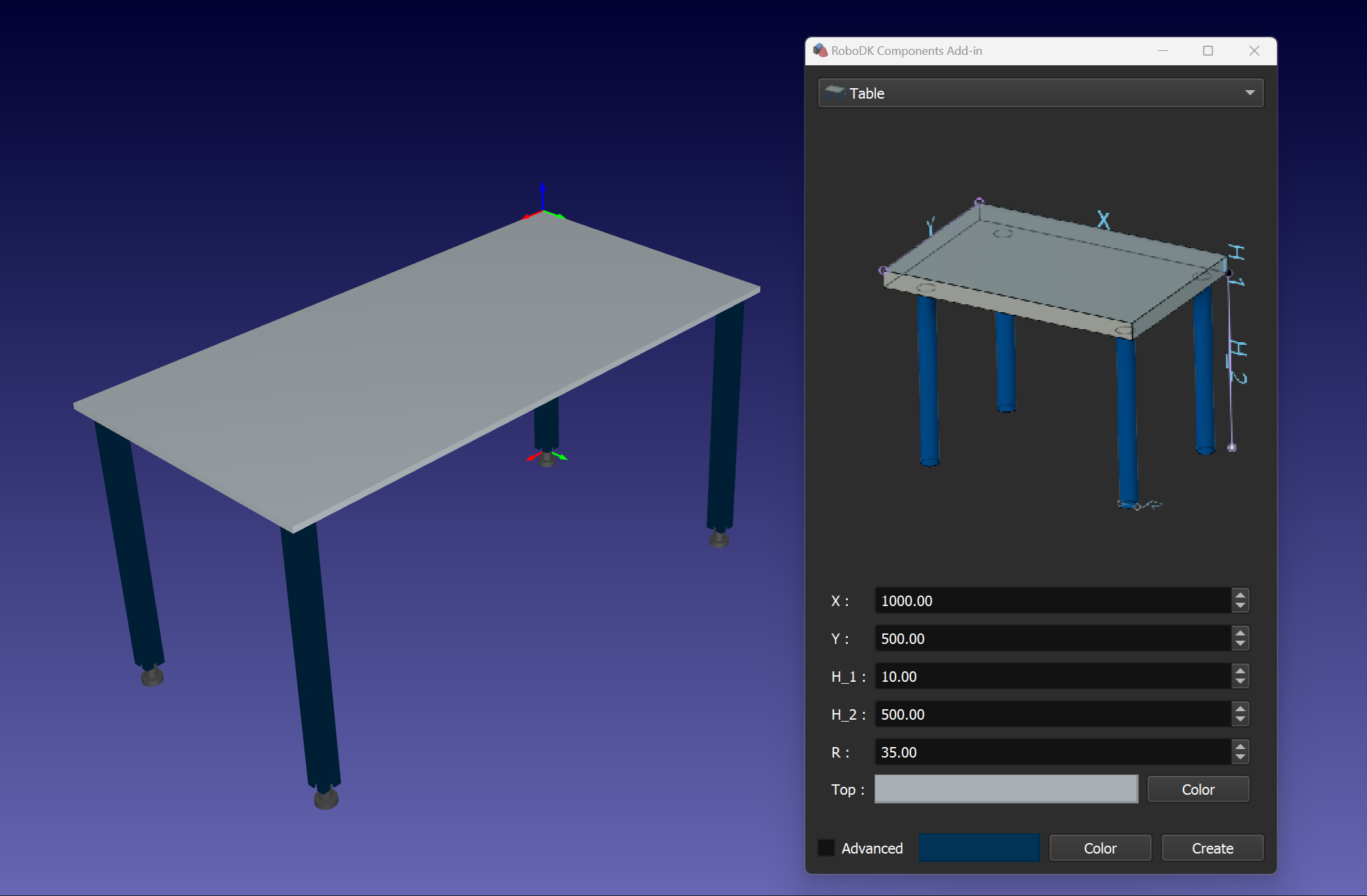
ヒント: テーブルの上面の色と透明度を設定するには、[色] ダイアログを使用します。
ヒントテーブルの上面に必要なオブジェクトを配置するには、追加で作成したTable N Plane Frameというフレームが便利です。
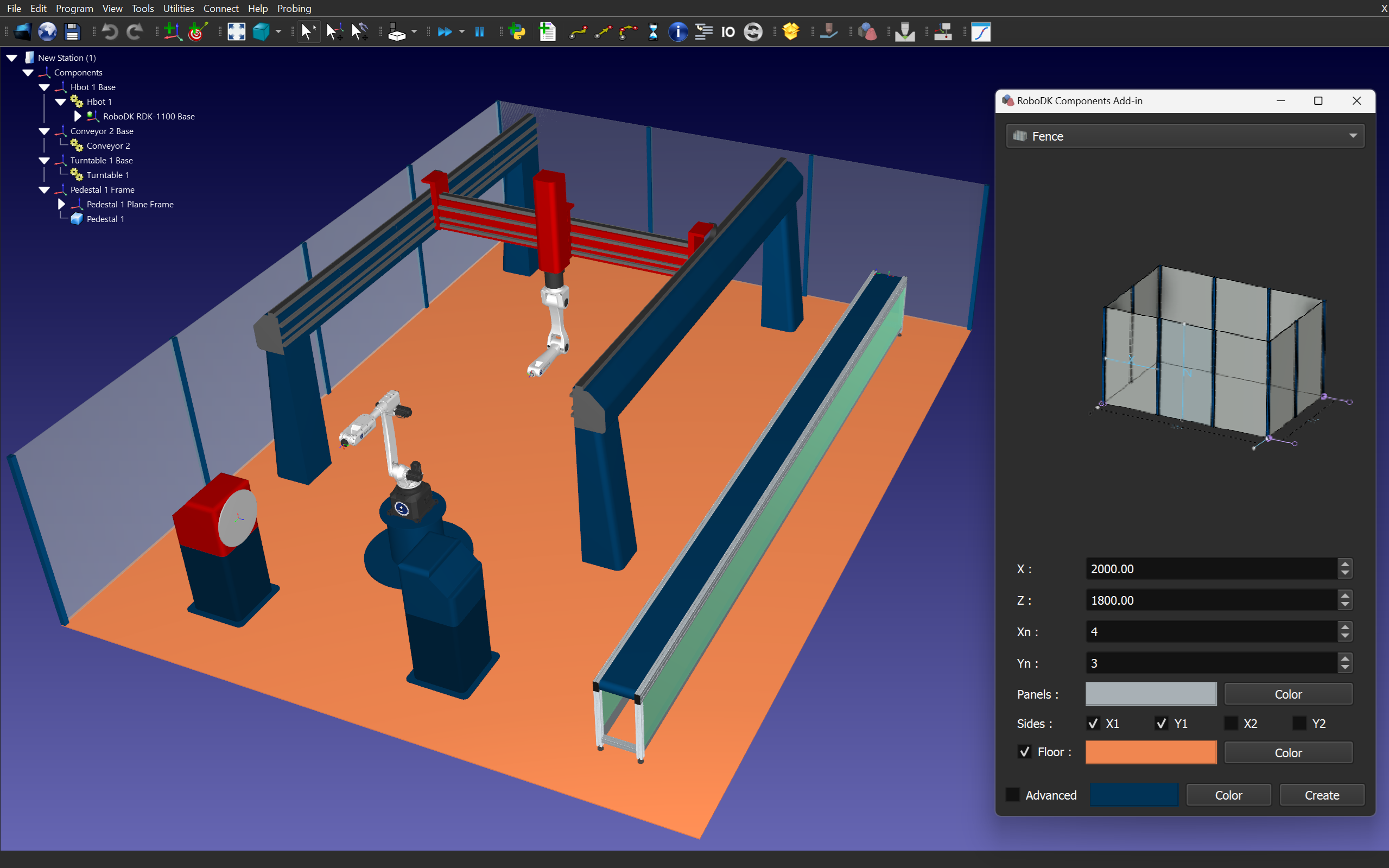
フェンス
パネルの寸法(X、Z)とセクション番号(Xn、Yn)を指定してフェンスを作成できます。
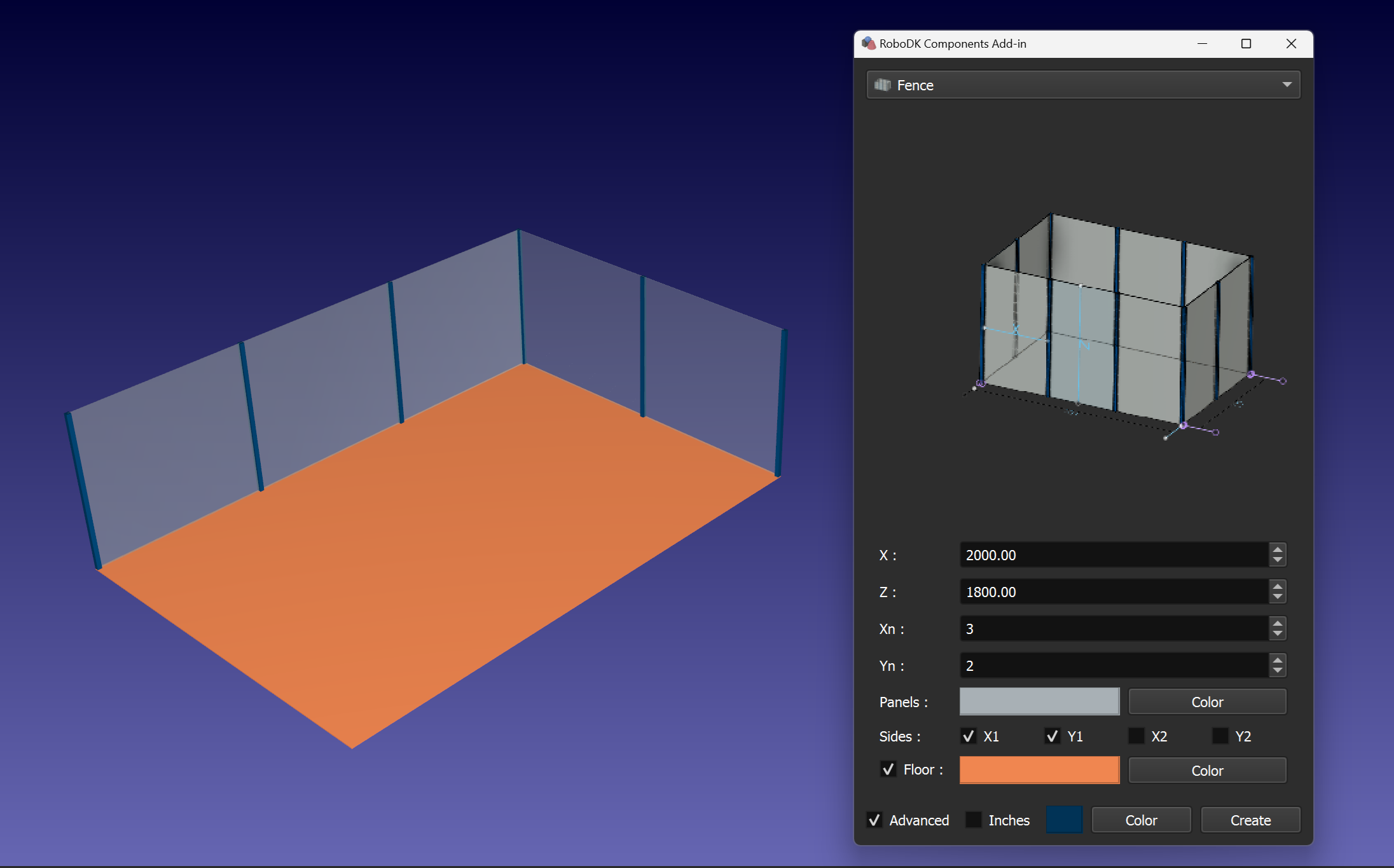
ヒント: 指定した色と透明度でフロアを追加するには、[フロア]チェックボックスと対応する[色]ダイアログを使用します。
レール
レールベースとキャリッジの長さ、幅、高さ、色などのパラメータを指定してレールを作成できます。
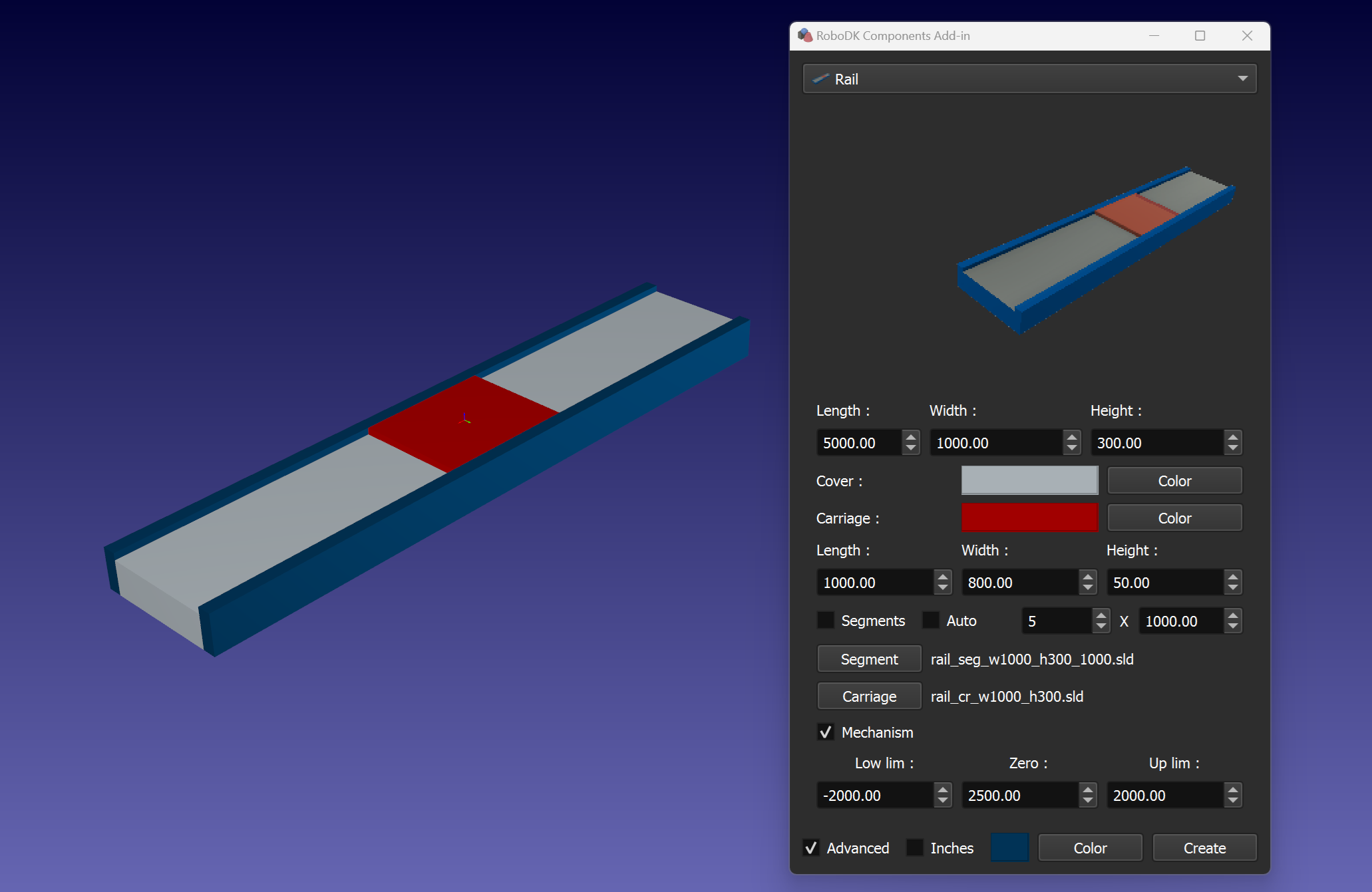
ヒント: レール機構を作成するには、[機構]チェックボックスを使用します。さらに、対応するパラメータを使用して、モーションリミットとキャリッジのゼロ位置を設定できます。
注: Segments オプションを使用する場合は、セグメントとキャリッジモデルの変位を確認してください。Modelsフォルダにはいくつかのサンプルがあります。デフォルトでは、モデル例のあるフォルダはC:㊦RoboDKAddins ㊦com.robodk.app.shape.Components ㊦Models ㊦になります。
Tボット
Xビーム、キャリッジ、Zビームのパラメータを設定することで、パラメトリックTボットを作成することができます。
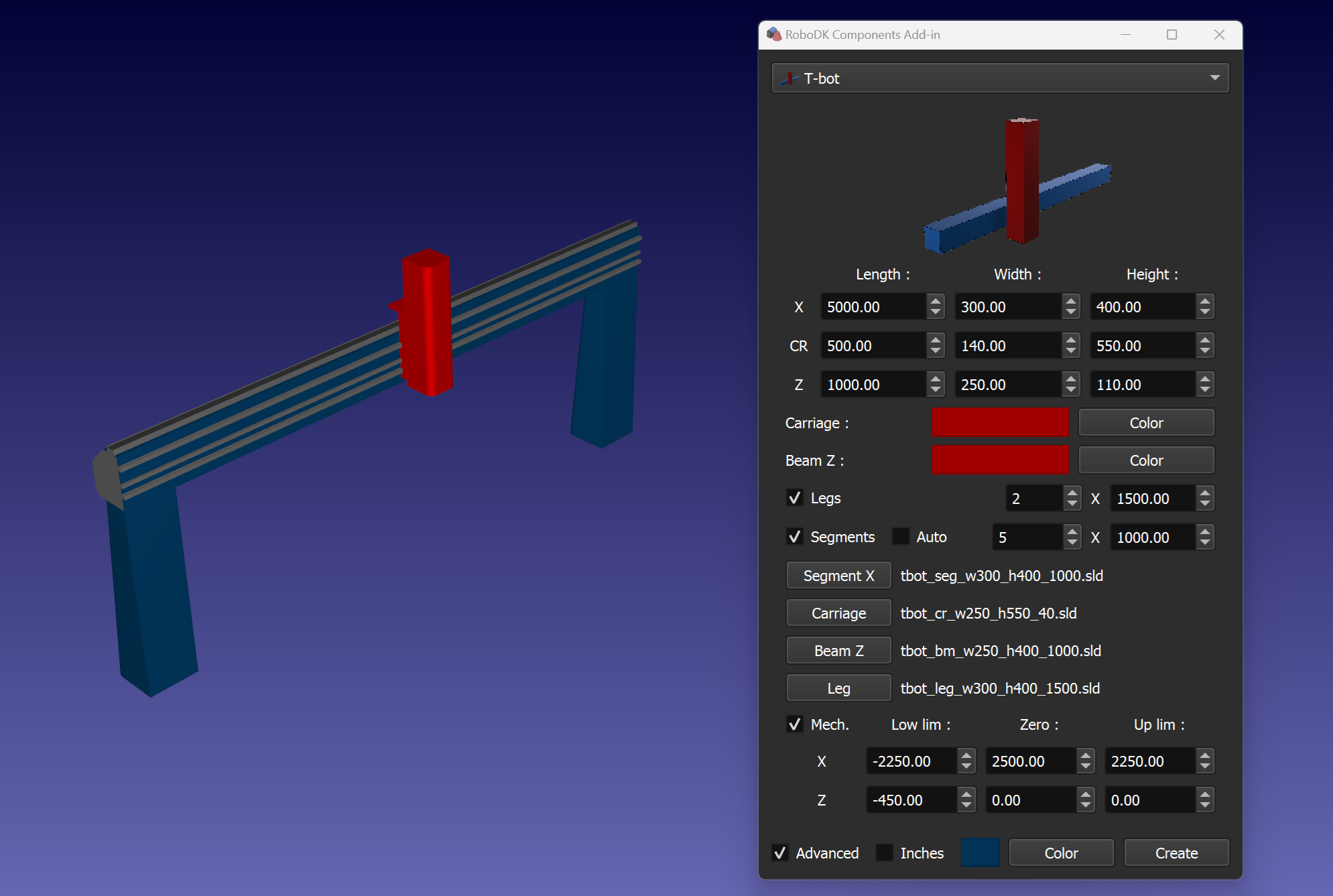
ヒント: Segment、Beam Z、Carriageの各モデルを使用すると、Xビームをセグメント化したTボットを作成できます。Segment X、Carriage、Beam Zボタンを使用して、適切なモデルファイルを設定する必要があります。正しい寸法値と正しいセグメント数を使用してください。Segmentsチェックボックスを使用して、適切なT-botモデルを構築します。
注:Segments オプションを使用した場合、セグメント、ビーム、キャリッジモデルの変位を確認してください。Modelsフォルダにはいくつかのサンプルがあります。デフォルトでは、モデル例があるフォルダはC:㊟RoboDKAddins ㊟com.robodk.app.shape.Components ㊟Models ㊟です。
Hボット
Xビーム、Yビーム、キャリッジ、Zビームのパラメータを設定することで、パラメトリックHロボットを作成することができます。
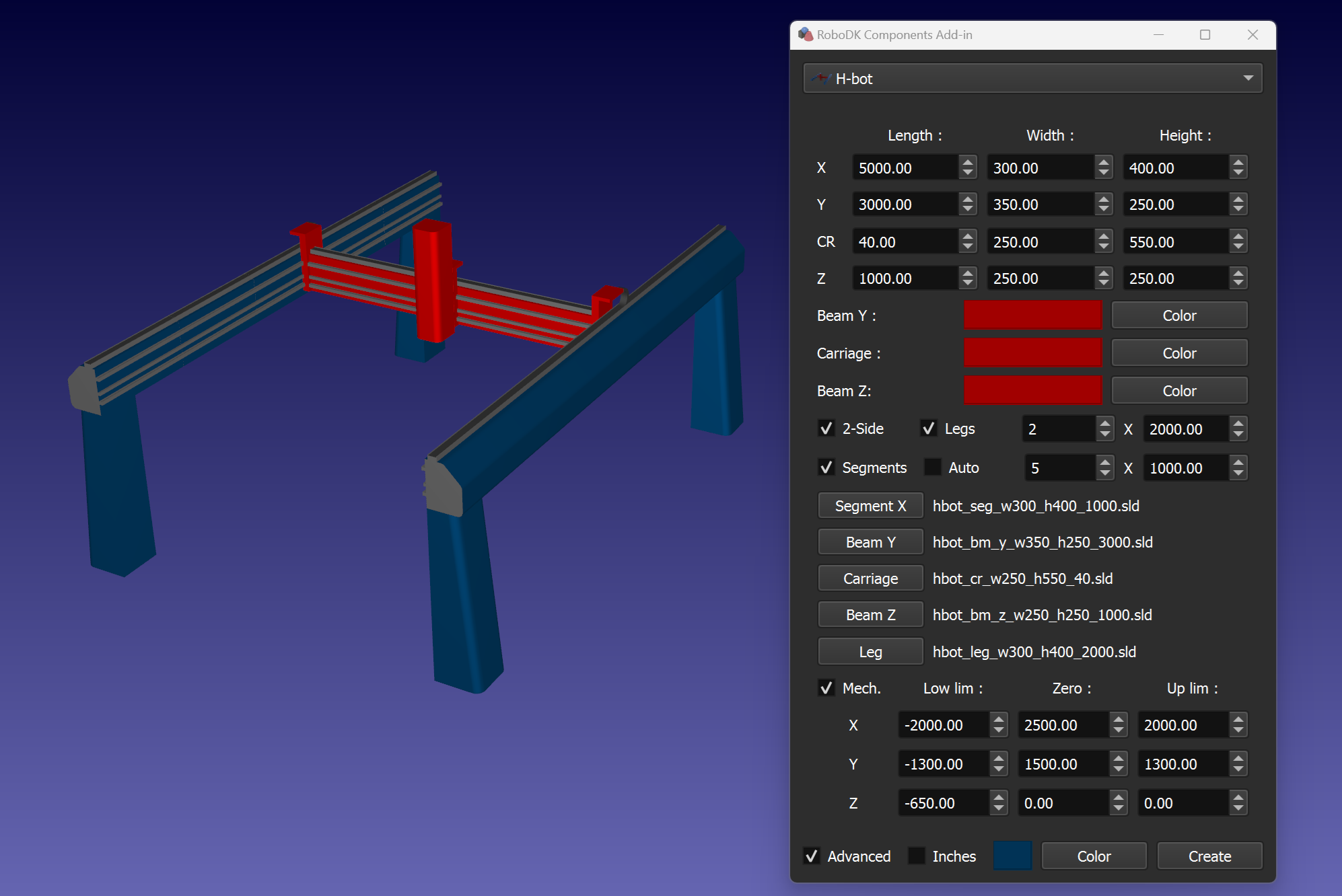
ヒント: Segment、Beam Y、Beam Z、Carriageの各モデルを使用すると、分割されたXビームを持つHボットを作成できます。Segment X、Beam Y、Carriage、Beam Zボタンを使用して、適切なモデルファイルを設定する必要があります。正しい寸法値と正しいセグメント数を使用していることを確認してください。Segmentsチェックボックスを使用して、適切なH-botモデルを構築します。
注:Segments オプションを使用した場合、セグメント、ビーム、キャリッジモデルの変位を確認してください。Modelsフォルダにはいくつかのサンプルがあります。デフォルトでは、モデル例があるフォルダはC:㊟RoboDKAddins ㊟com.robodk.app.shape.Components ㊟Models ㊟です。
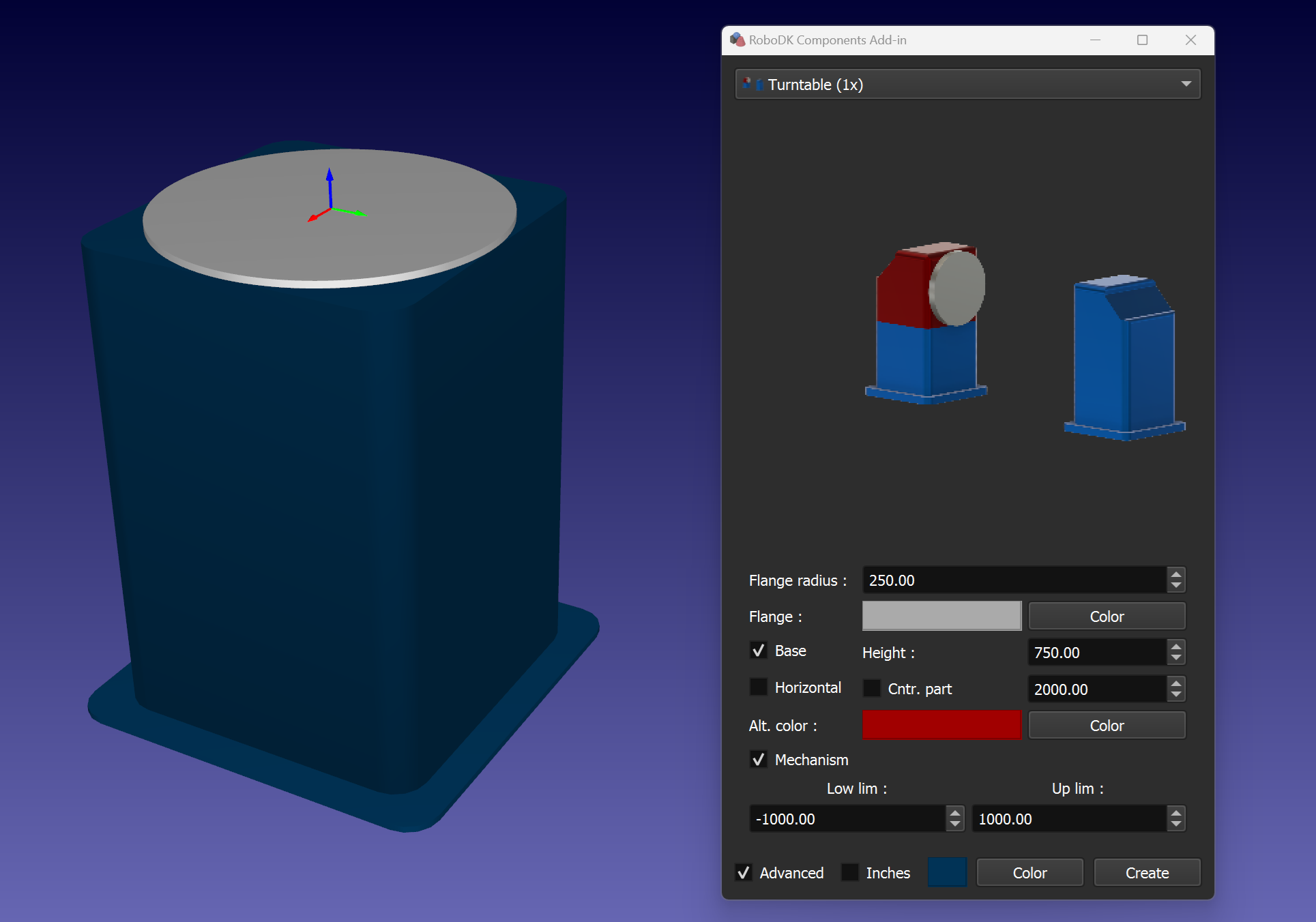
ターンテーブル (1x)
フランジ半径、ベースの高さ、ベースとフランジの色などを指定してターンテーブルを作成できます。
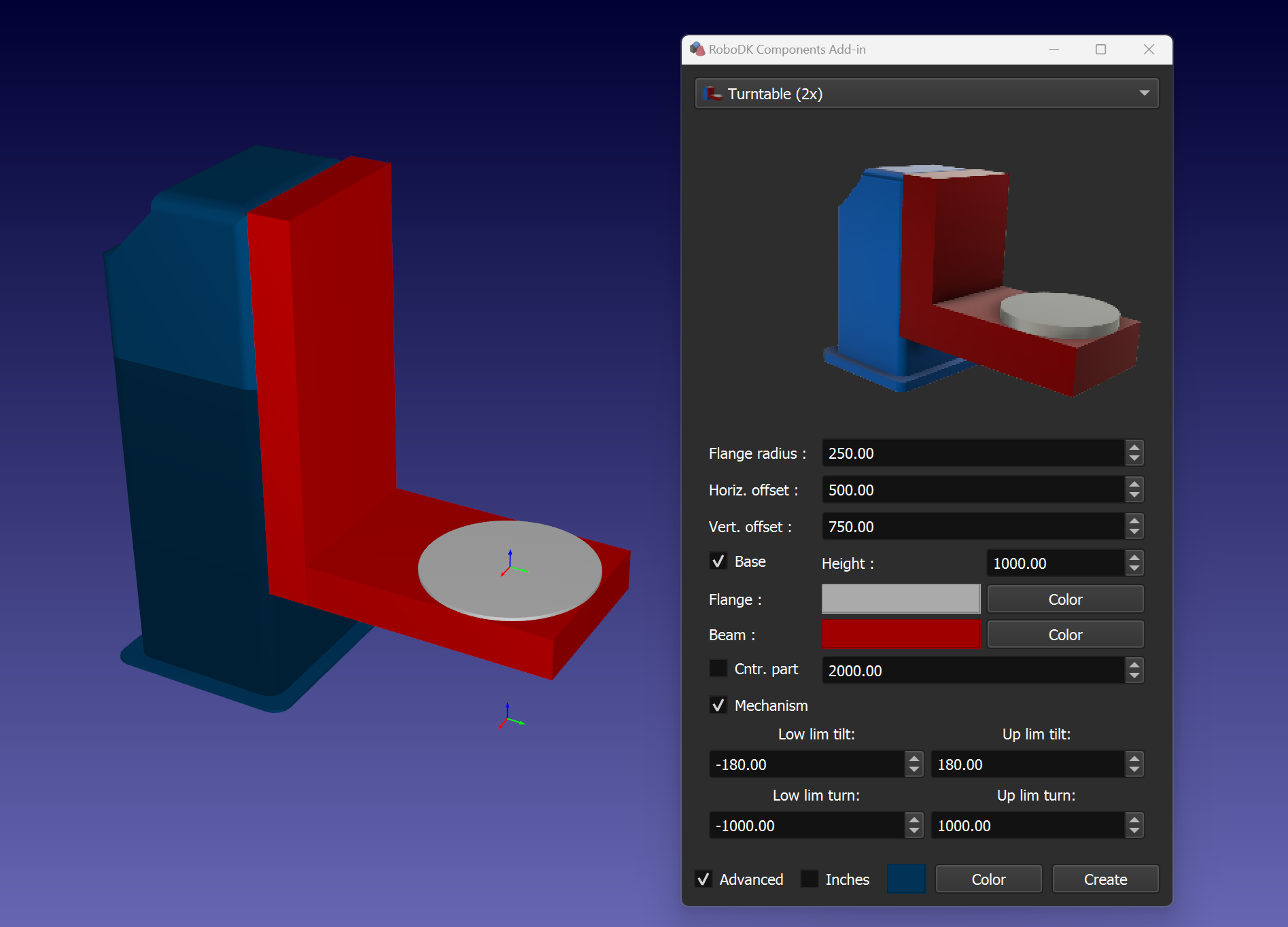
ターンテーブル(2倍)
フランジ半径、垂直および水平オフセット、ベース高さ、ベース、ビーム、フランジの色などのパラメータを指定して、傾斜ターンテーブルを作成できます。
ターンテーブル(3倍)
フランジ半径、サイドおよび水平オフセット、高さ、ベース、ビーム、フランジの色などのパラメータを指定して、3軸ポジショナを作成できます。
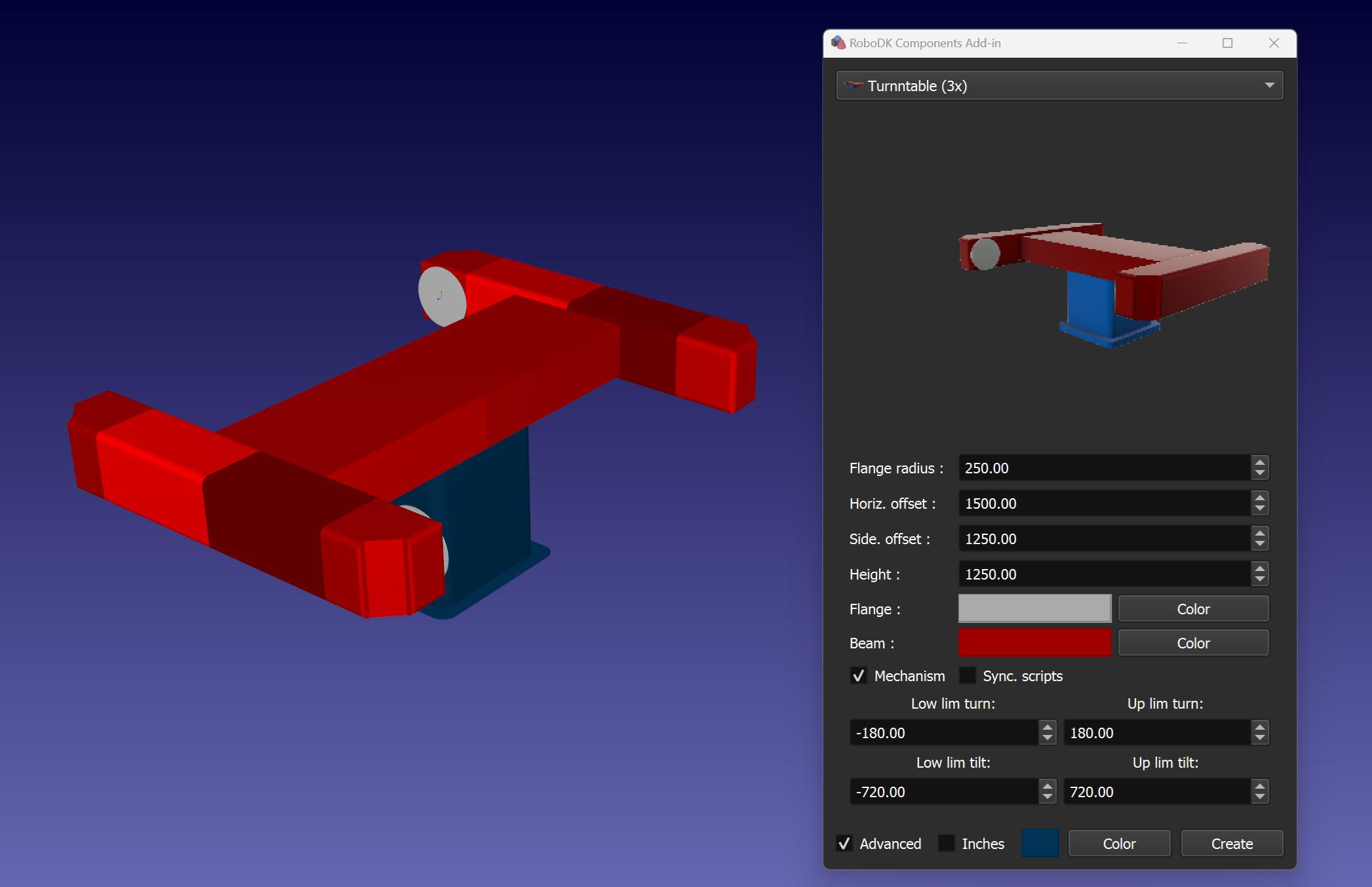
注意:デフォルトでは、同期スクリプトのサンプルが格納されているフォルダはC:㊦RoboDKAdd-in です。
ボックス
寸法(X、Y、Z)を指定してボックスを作成できます。
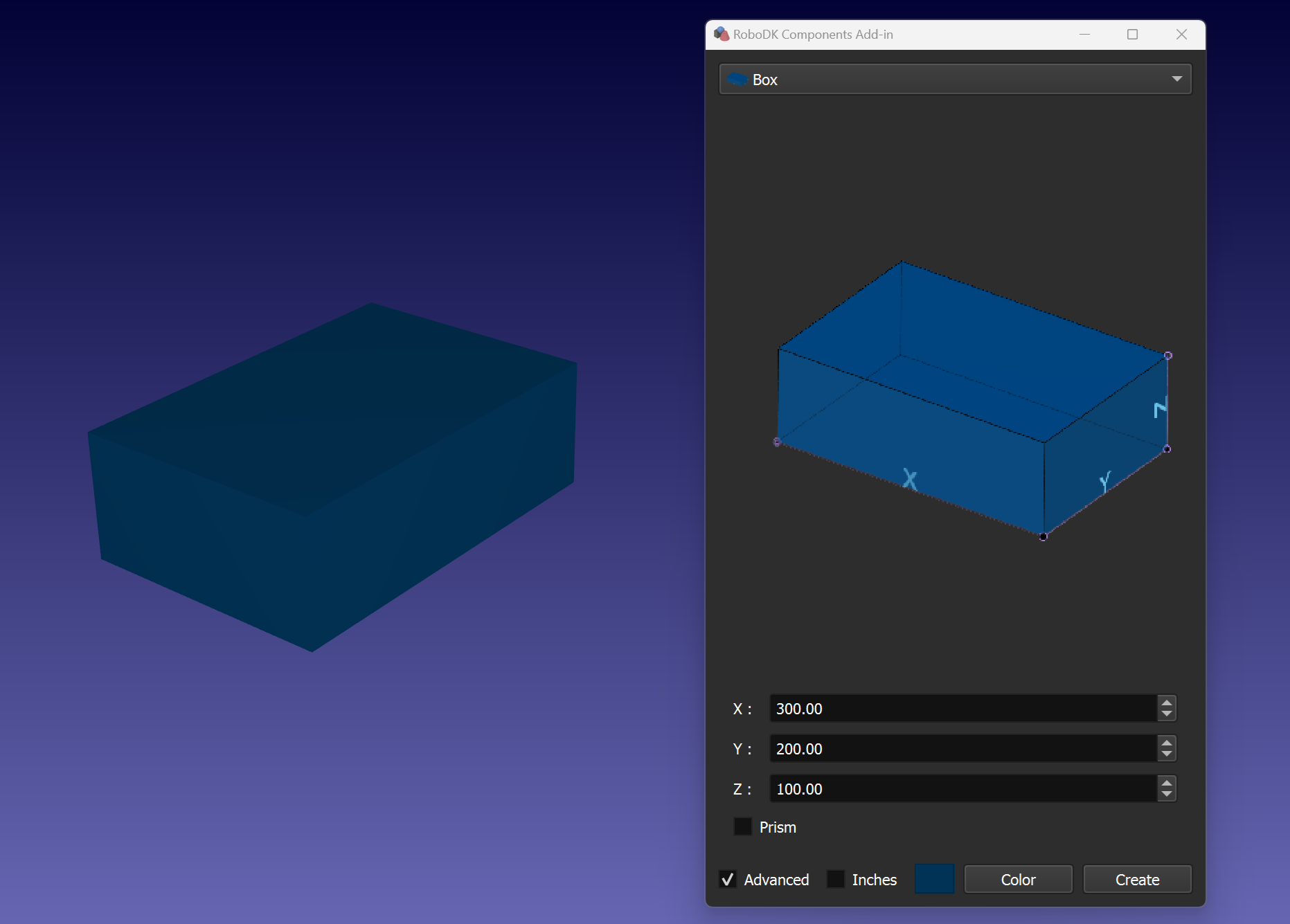
ヒント: プリズムを作成するには、プリズムチェックボックスを使用します。
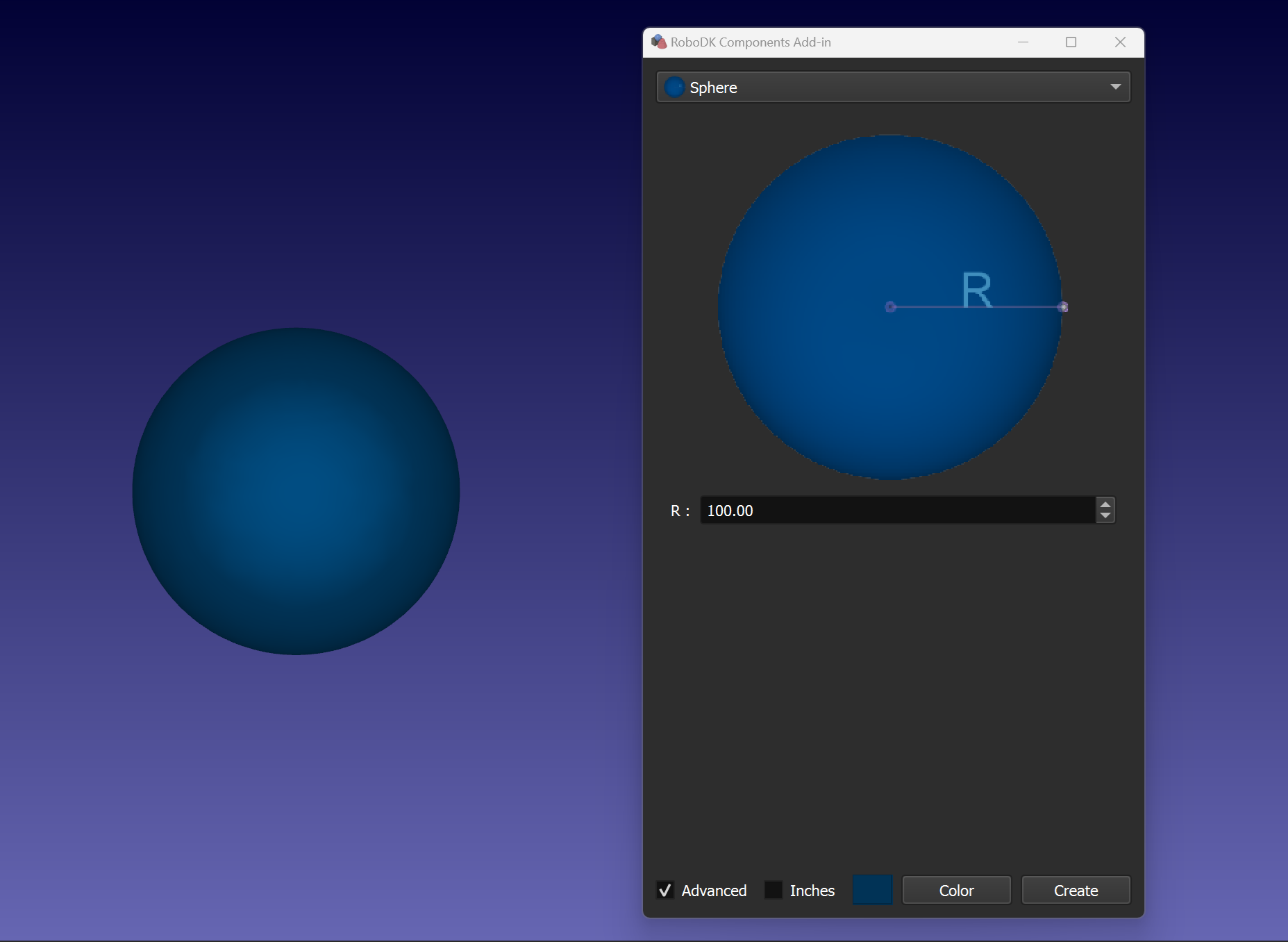
球体
半径(R)を指定して球体を作成できます。
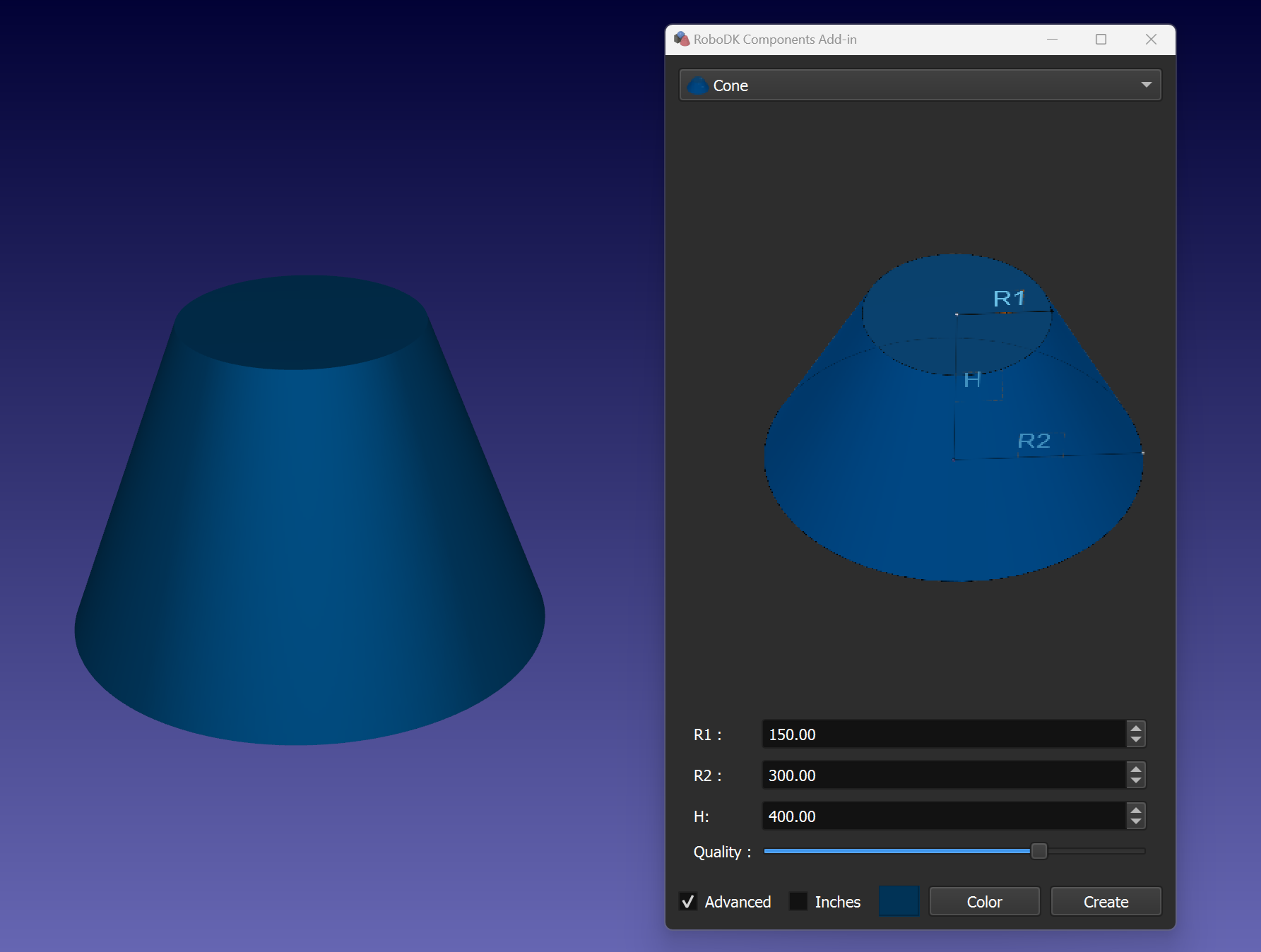
コーン
寸法(R1, R2, H)と品質パラメータを指定してコーンを作成できます。