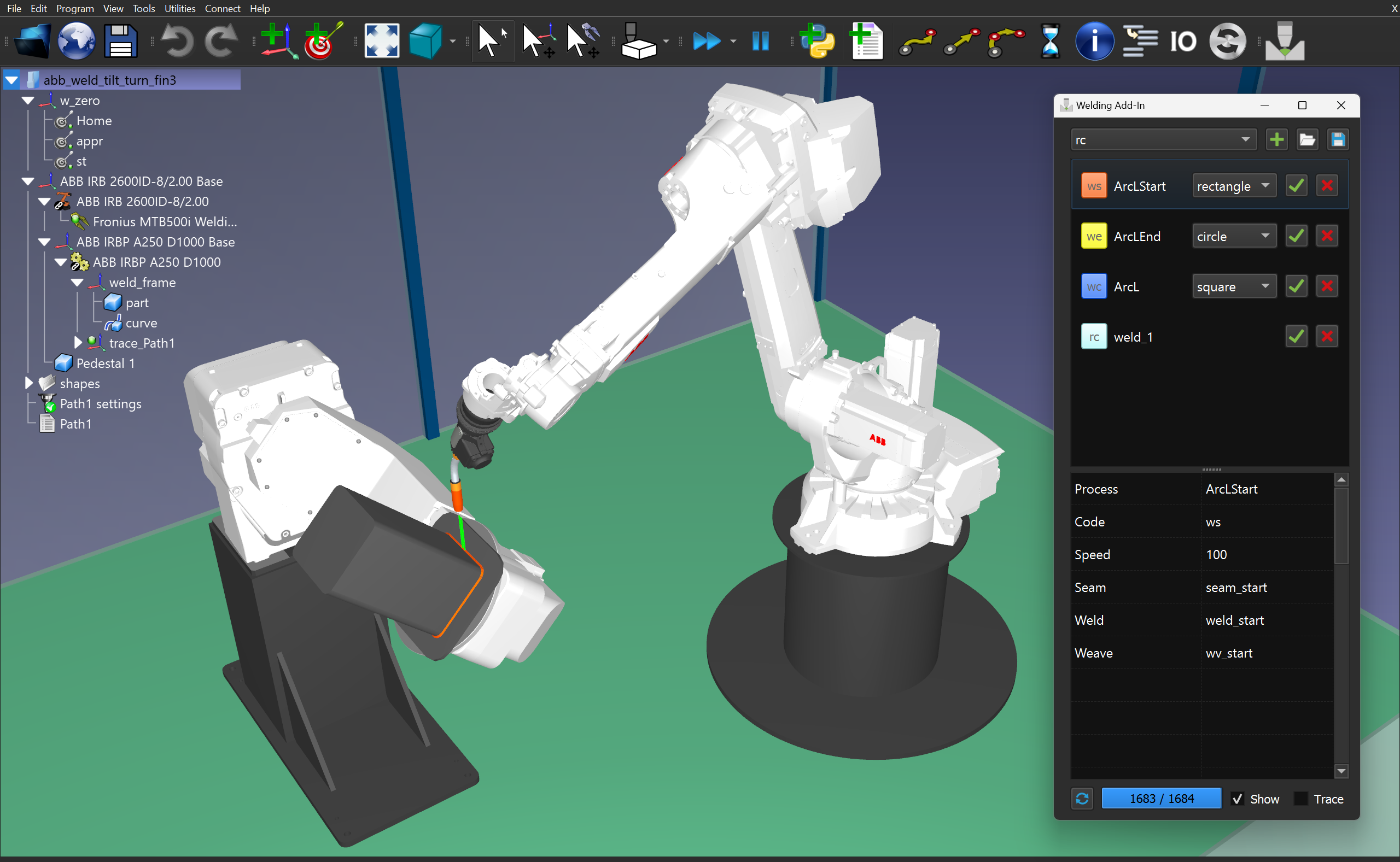
溶接アドイン
RoboDK 溶接アドインを使用すると、RoboDK プログラムでさまざまな溶接指示やレシピを適用し、適切に可視化することができます。
RoboDK 溶接アドインを使用すると、次のことができます:
1.溶接開始、継続、終了コマンドなどのコマンドを簡単に作成、追加できます。
2.作成されたコマンドのパラメータ・リストを定義します(溶接と視覚化に特化)。
3.軌跡をソリッドモデルとして視覚化
4.事前定義された溶接形状/プロファイルを使用した溶接作成(材料追加)の視覚化
5.カスタム挿入コードの作成と追加が簡単
6.ステーションプロジェクトに作成したすべてのデータを保存
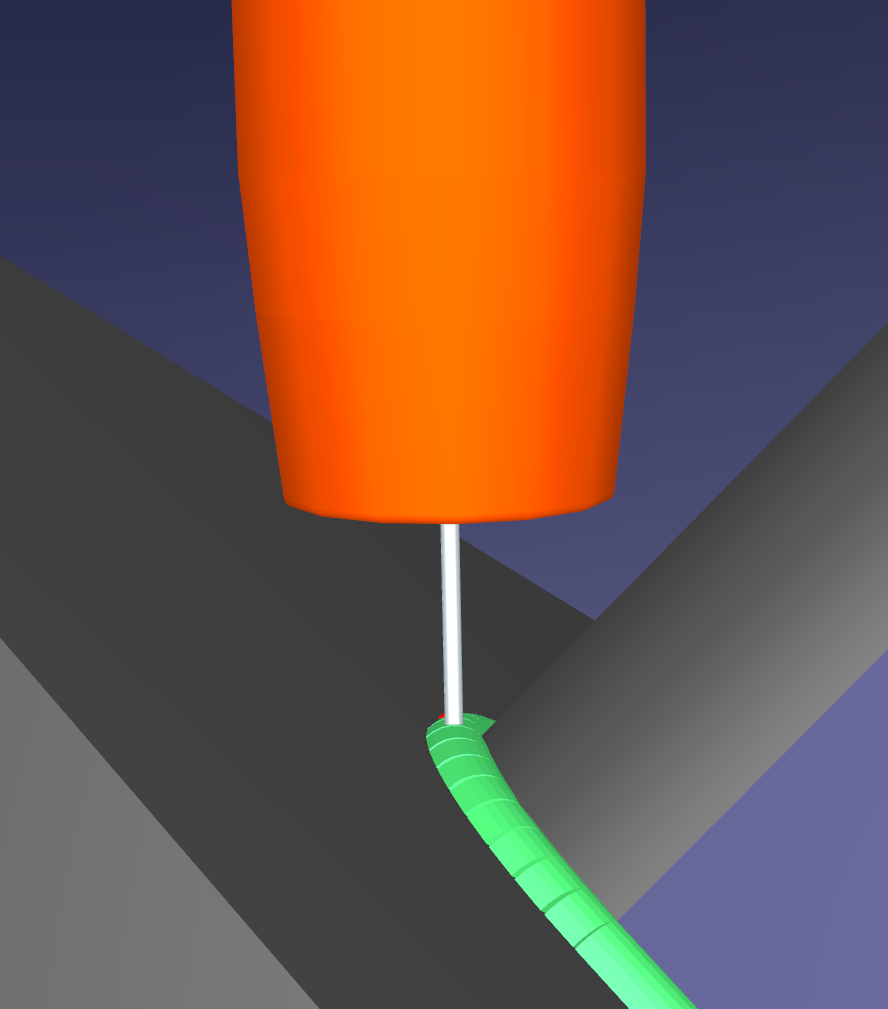
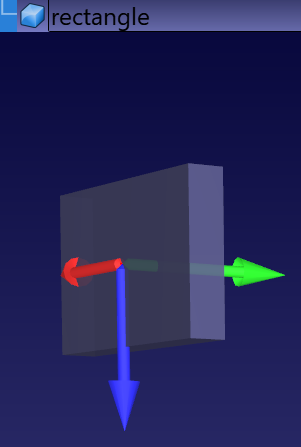
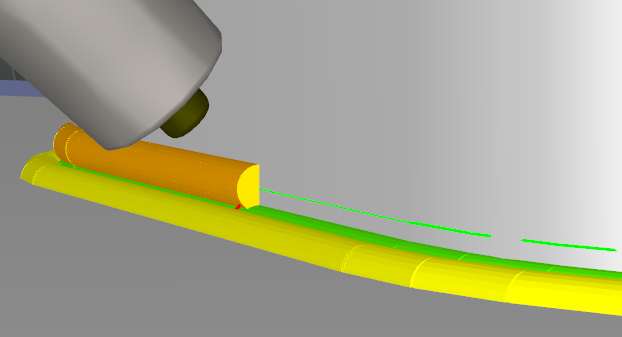
次の画像は溶接トレースのプレビューです。
ビデオ溶接アドインのデモ:https://www.youtube.com/watch?v=ahl2wAaP_cI。
注:この溶接Add-inの実用的な使用例については、ドキュメントのポジショナー付きロボット溶接の例を参照してください。
インストール方法
RoboDK Addins Library から最新版の溶接アドインをダウンロードしてインストールすることができます。インストールはアドインマネージャを使って自動的に行われます。
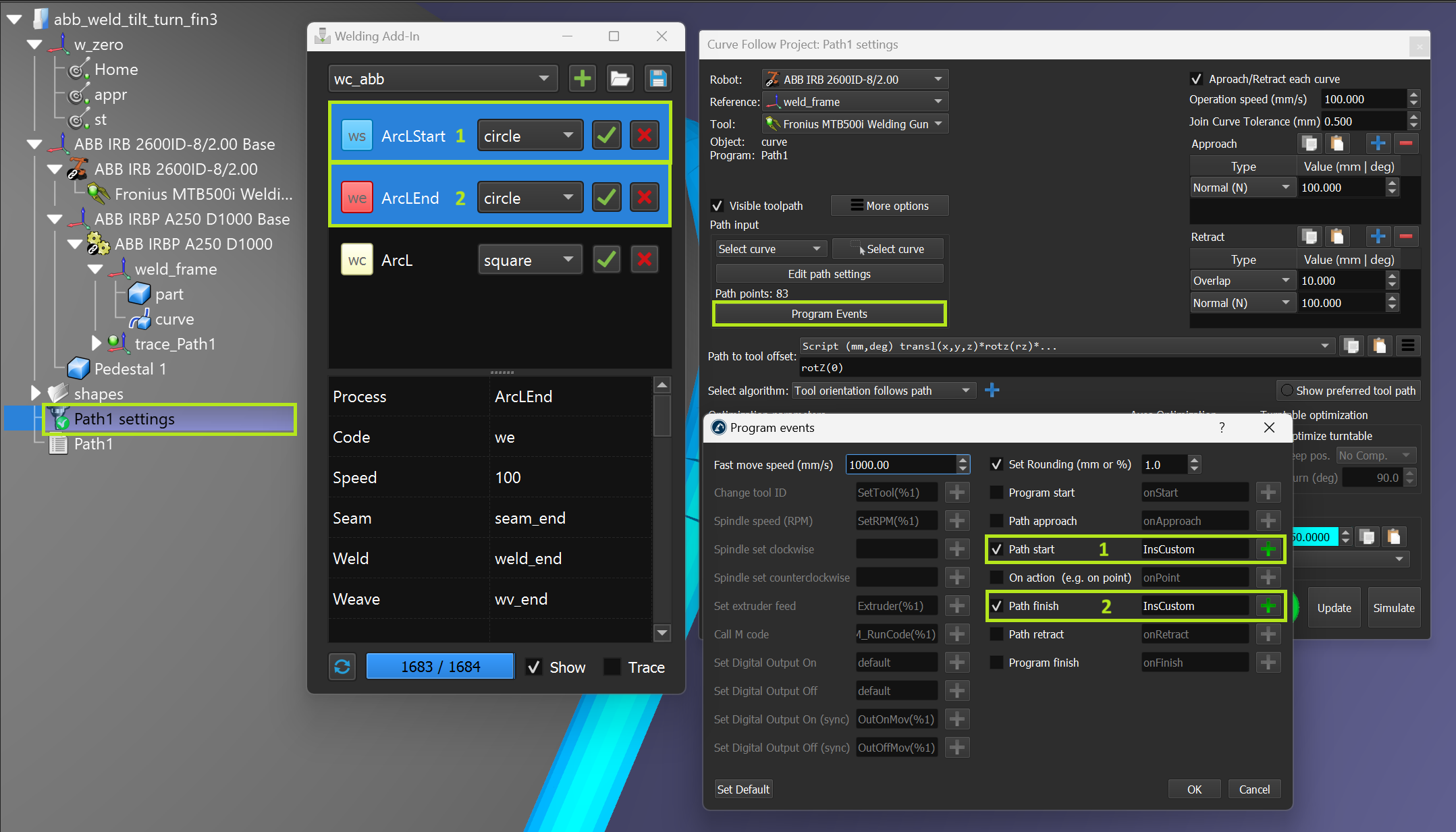
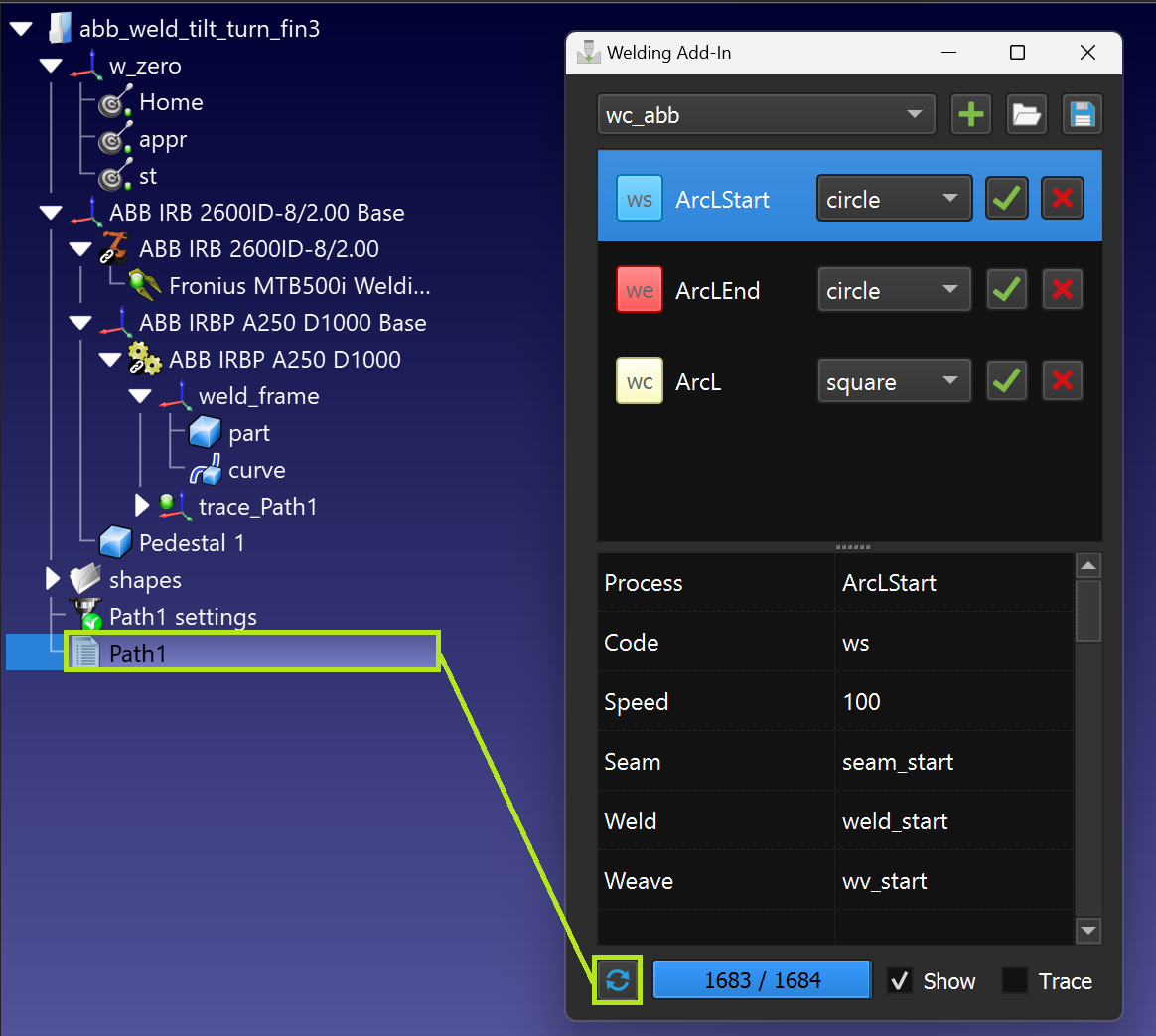
溶接インターフェース
このセクションでは、溶接アドインのユーザー・インターフェースの利用可能な機能について説明します。
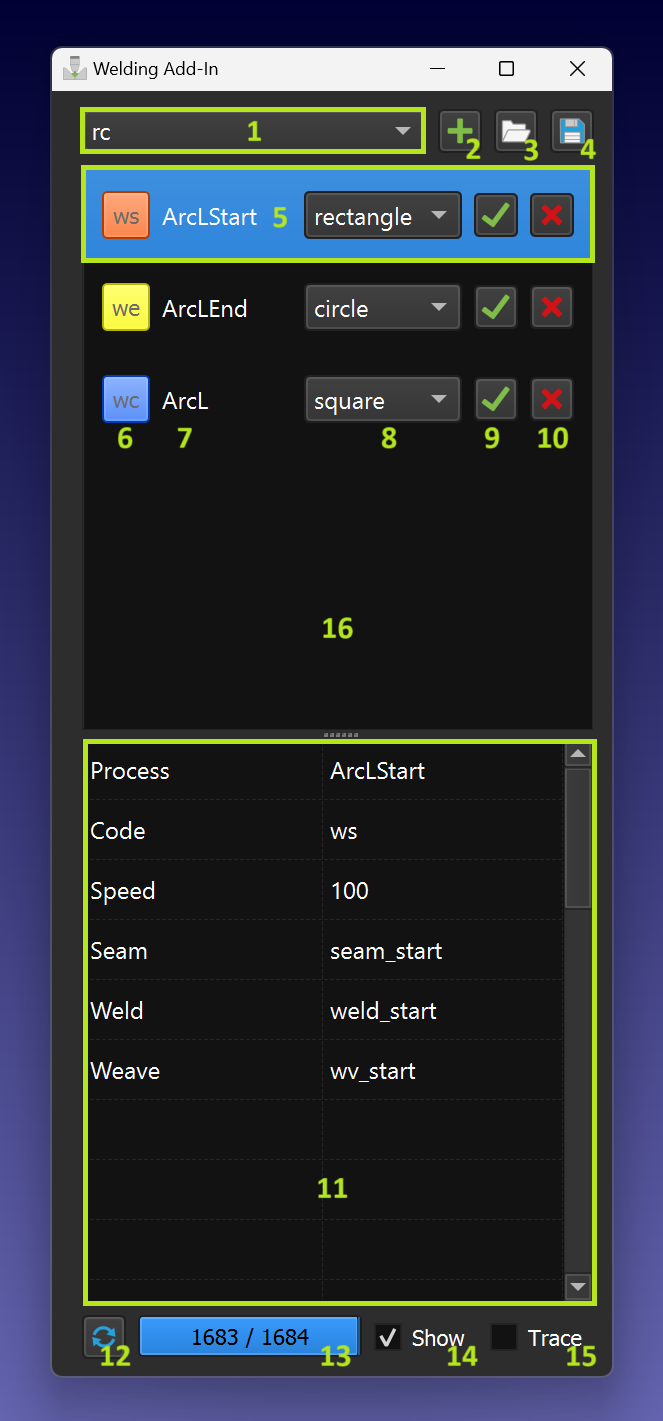
溶接アドインには、以下の機能要素が含まれています:
1.指示選択プルダウンメニュー。
2.指示リストに指示を追加
3.インポート指示リスト。
4.指示リストをエクスポートします。
5.現在の命令(選択)。
6.インストラクションコードとアイコンの色(クリックすると色が変わります。)
7.指導名(一意)。
8.適切なパス形状。
9.プログラムシーケンスまたは CFP に指示を追加します。
10.リストから命令を削除します。
11.選択された命令にリンクされているパラメータ。
12.パスモデルの構築
13.パスモデル構築の進捗状況。
14.パスモデルの可視性フラグ。
15.パストレースフラグ(材料の追加をシミュレートできます)。
16.指示リストエリア。
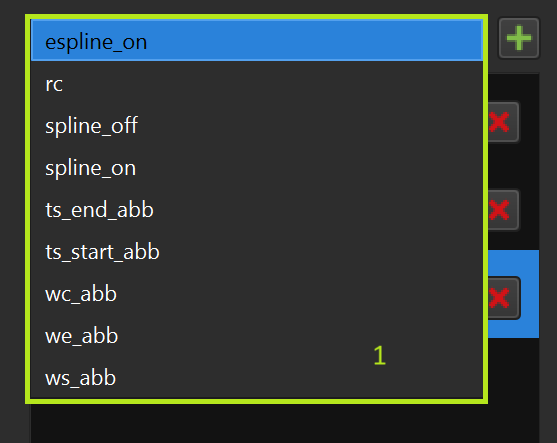
命令選択プルダウンメニュー
プルダウンメニューから追加する命令を選択できます:
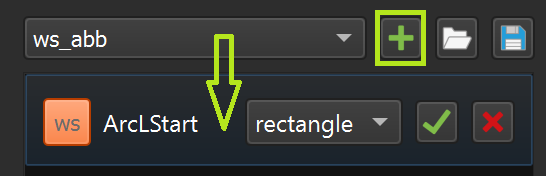
命令リストへの命令の追加
プルダウンメニューから選択したインストラクションを「+」ボタンで追加できます:
インストラクションテンプレートは以下のフォルダにあります(デフォルトのRoboDKインストール):
C:୧RoboDKAddins
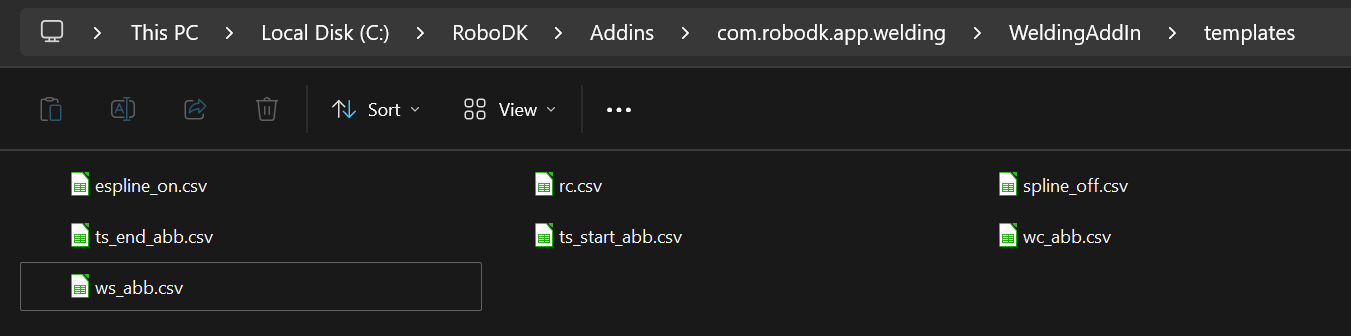
テンプレートは、'parameter->value'という文字列形式の通常の'.csv'ファイルとして表示されます:
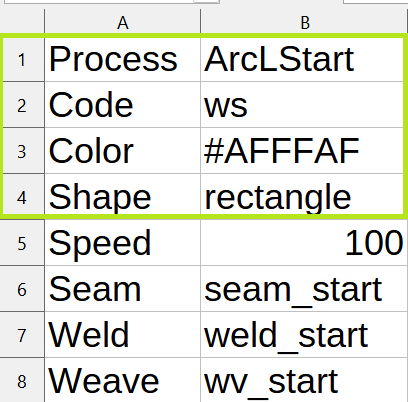
注:最初の4行は上の写真のようにします。
1.'Process'➔ 'プロセス名' (何らかの名前を指定すべき)
2.'Code'➔ 'Instruction code' (サポートされている命令コードの1つ)
3.'Color➔16進数形式の任意のカラーコード
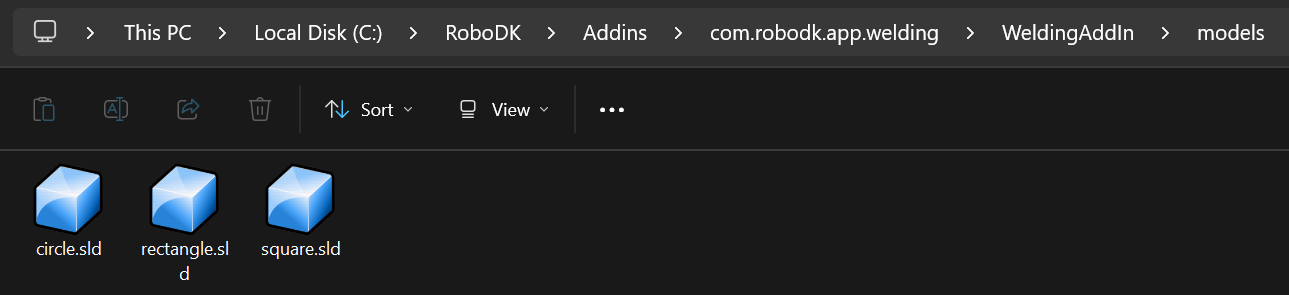
4.'Shape➔溶接指示用の形状モデルを含むファイル名。
注:形状名はファイル名と同じでなければなりません。デフォルトでは、形状モデルのあるフォルダはC:㊟RoboDKAddincom.robodk.app.weldingWeldingAddIn㊟models.
注:最大96個のユーザー・パラメーターを追加できます(最初の4個の定義済みパラメーターに続く)。
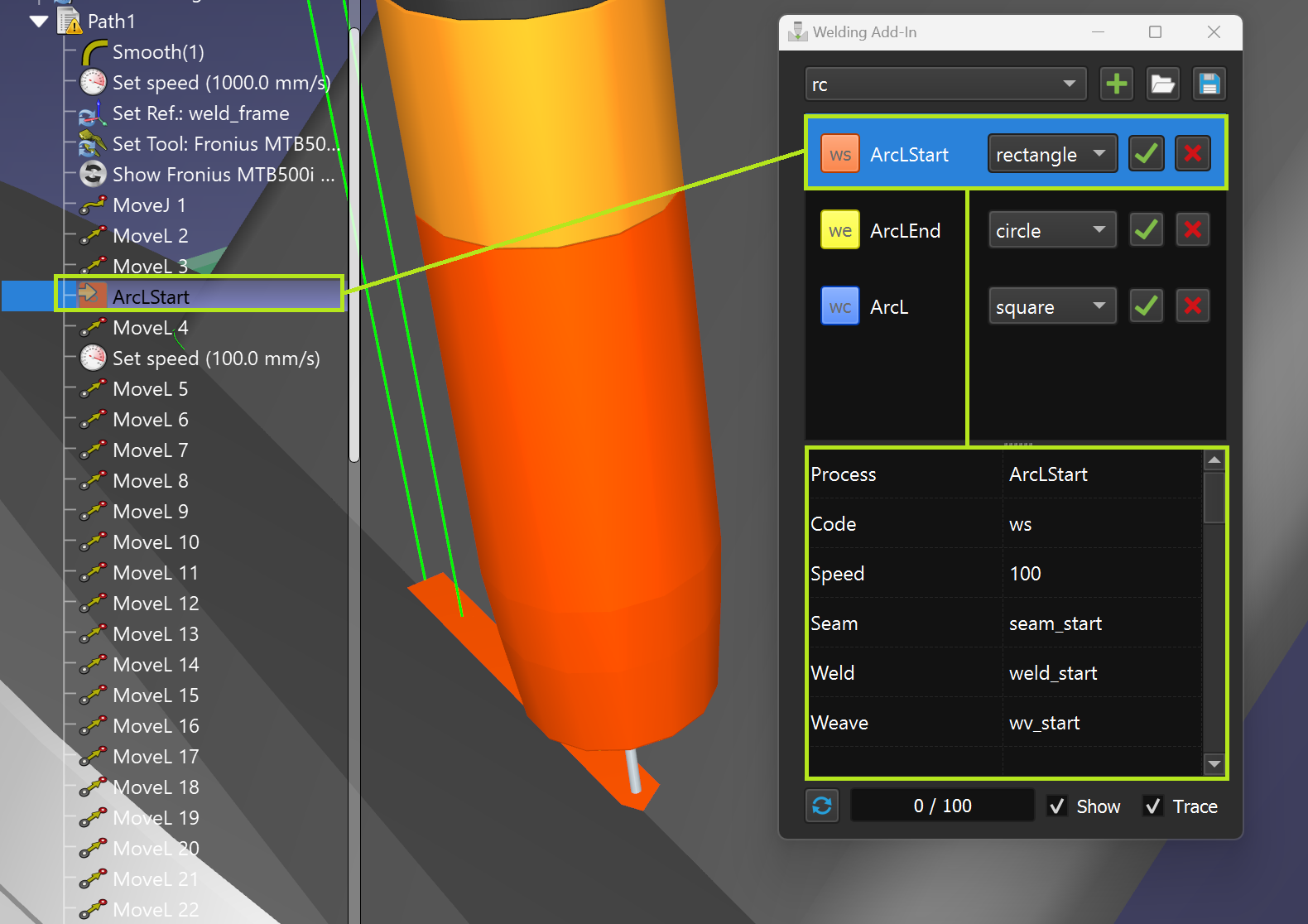
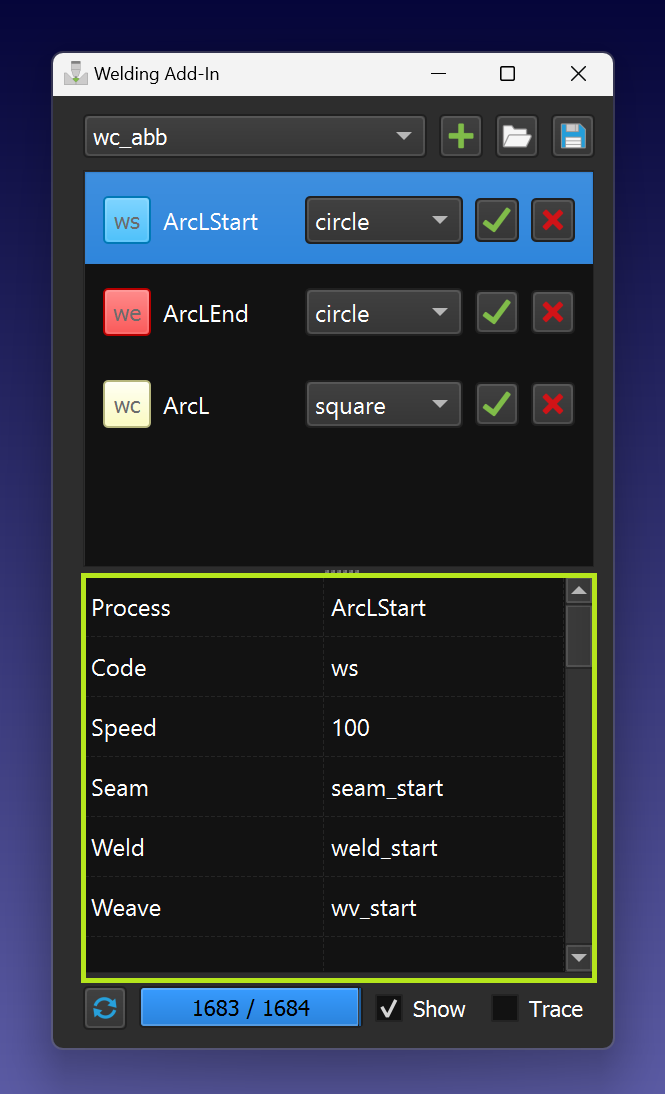
現在の命令(選択中)
命令リスト(9)で行を選択すると、パラメータにアクセスできます。また、プログラム実行中または対応するプログラム命令をダブルクリックすると、命令行が自動的に強調表示されます:
命令コードとアイコンの色
インストラクションコードボタンをクリックすると、インストラクションと対応するパスの色を設定できます(インストラクションラインが最初に選択されていることを確認してください):
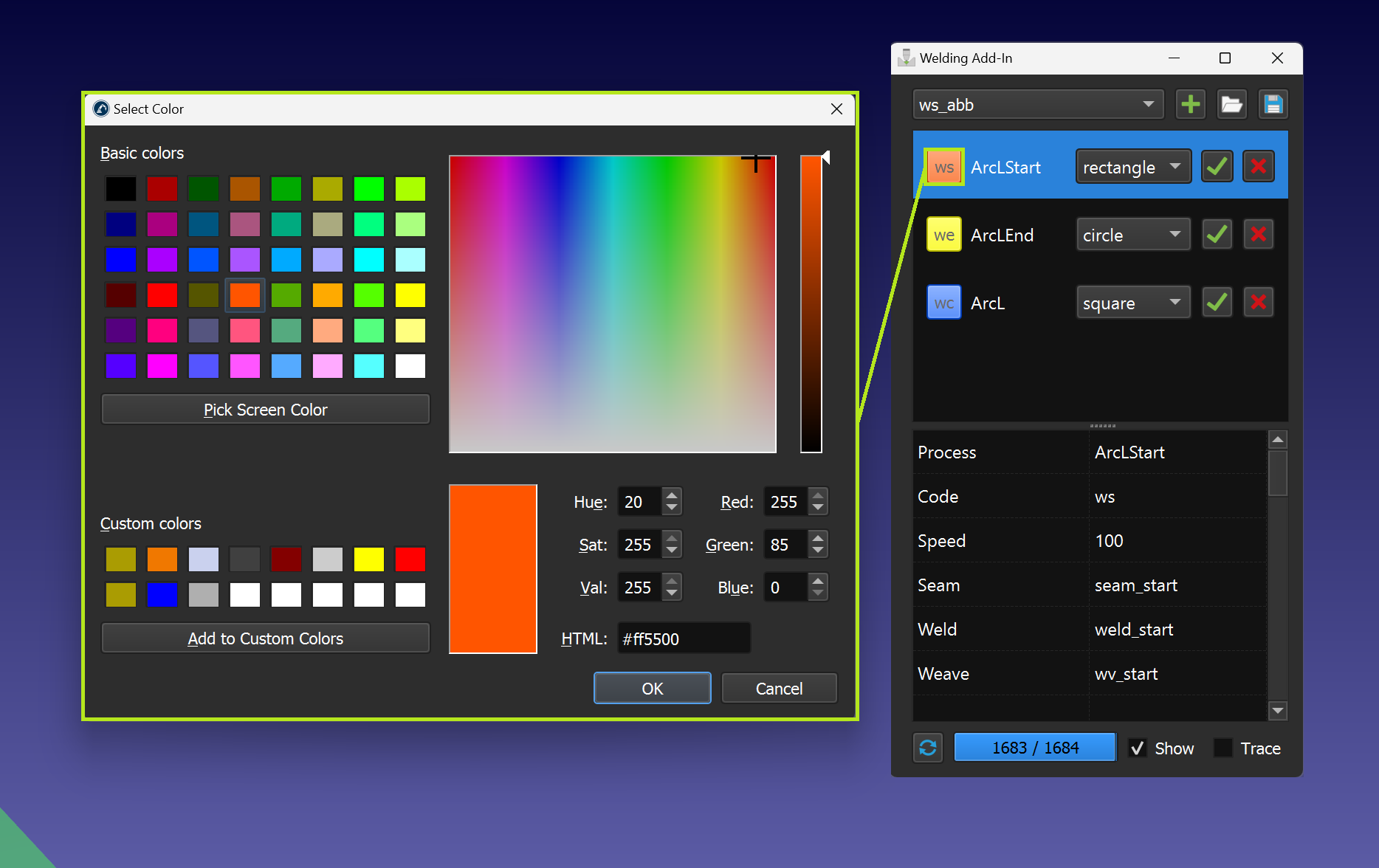
注:デフォルトでは、以下の命令タイプ(コード)のみがサポートされています:
1.WS - 溶接開始手順
2.WC - 溶接の継続指導
3.溶接終了指示
4.rc - カスタム挿入コード命令
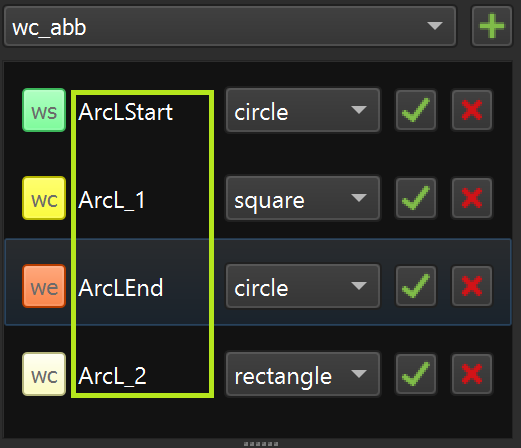
命令名
命令リストの各命令には、一意の名前('Process'パラメータの値)が必要です:
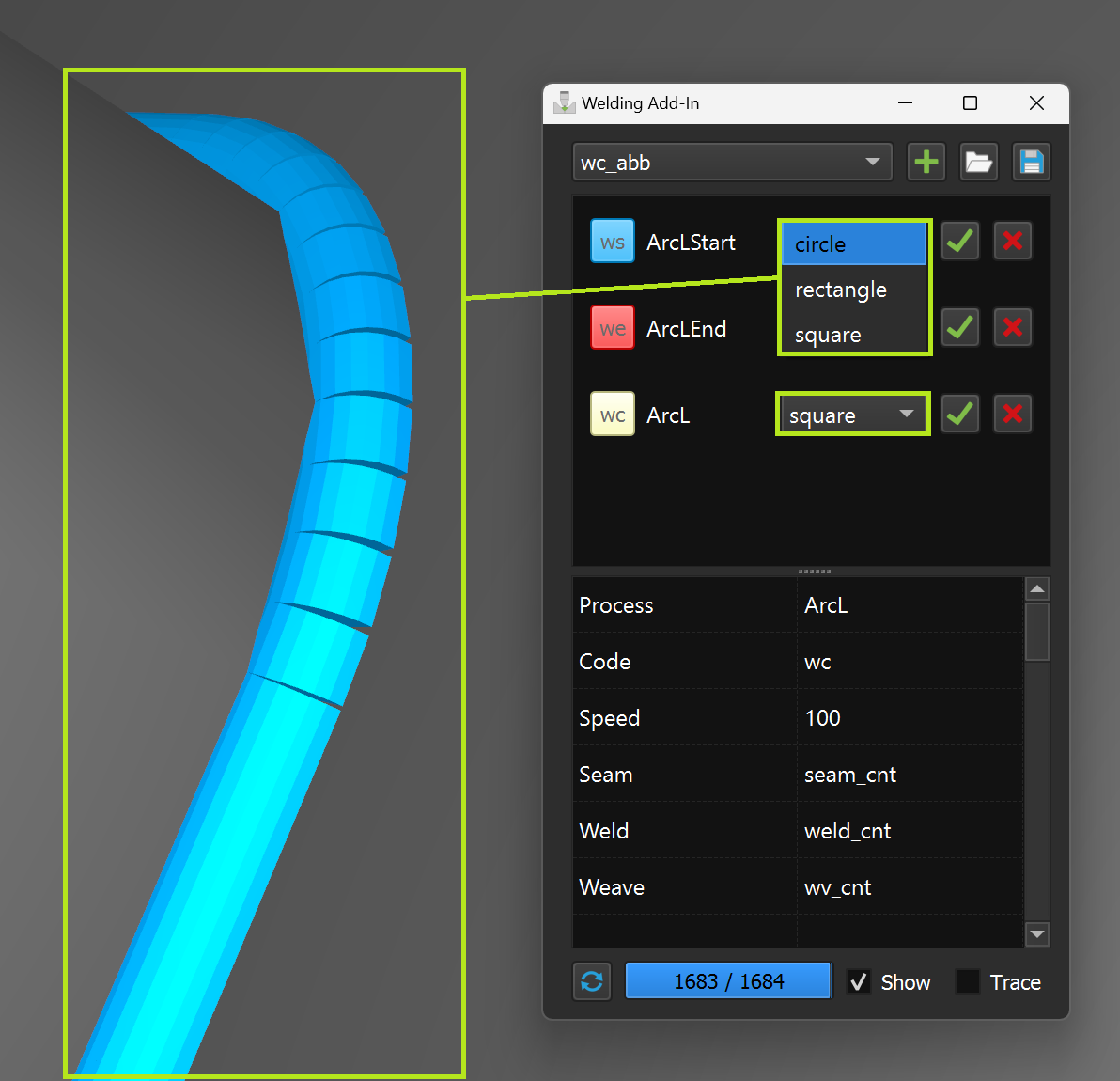
パス形状
命令テンプレートにパス形状定義がある場合は、プルダウンメニューから選択できます:
C:◆RoboDKAddin
ヒント: 自分でパス要素モデルを追加する場合、ワールド座標系に対してパス要素を適切に配置する方法を確認するために、提供されているモデルの1つをチェックすることができます:
プログラムシーケンスへの命令の追加
RoboDKのプログラムシーケンスには、1つの命令、または連続して選択された2つの命令を追加することができます。
補足: 単一選択(アドイン側)の場合、'ws', 'wc', 'rc'命令はRoboDKプログラム側で選択されたプログラム命令の前に追加されます。また、'we' タイプの命令は、選択されたシーケンスの後に追加されます。
補足:複数選択(アドイン側)の場合、最初に選択された命令はRoboDKプログラムで選択されたプログラム命令の前に追加され、2番目に選択された命令は選択されたシーケンスの後に追加されます。
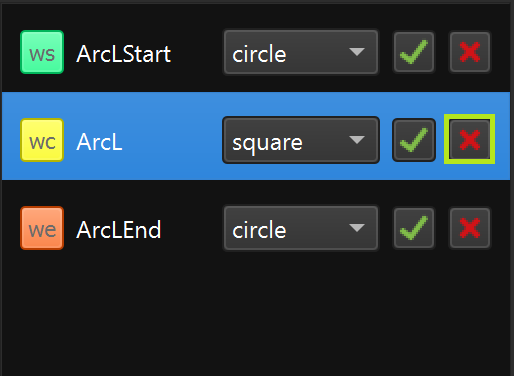
リストから命令を削除
インストラクションリストからインストラクションを削除するには、「X」ボタンをクリックします。
パラメータ
パラメータテーブルで直接パラメータを変更できます。変更は自動的に保存されます。
パラメータのインポート/エクスポート
インポート/エクスポート機能を使用して、パラメータ付きの命令リスト全体をインポートしたり、すべてのデータをエクスポートしたりすることができます。

パスビルディング
選択したプログラムの「ビルド」機能を使ってパスをビルドできます(溶接指示が含まれている必要があります)。
パストレース
トレース」オプションを有効にすると、ロボットが溶接経路に沿って移動する際に、溶接材料がどのように適用されるかを確認することができます。

注:リモートTCP最適化アルゴリズム(「ロボットが物体を保持する」、「ロボットが物体を保持して軌道をたどる」)は、将来のアップデートでトレース機能に対応する予定です。
対応ポストプロセッサー
溶接アドインは、シミュレーションとオフラインプログラミング機能を提供します。命令は、ロボットコントローラに固有の出力プログラムに追加されます。溶接アドイン命令をサポートするポストプロセッサが増えています:
1.ABB RAPID IRC5
2.ABB RAPID S4C
3.ファナックR30i
4.川崎
5.KUKA KRC2 DAT
6.モトマン
特定のコントローラにサポートを追加する場合は、お問い合わせください。
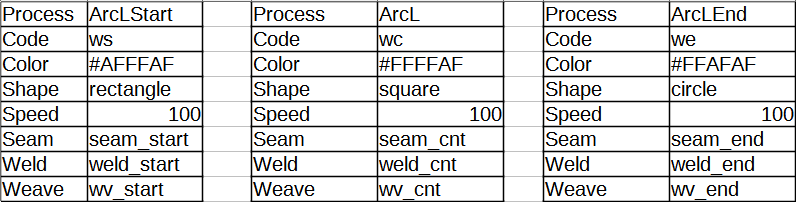
ABB溶接テンプレート
テンプレート abb_ws.csv、abb_wc.csv、abb_we.csv は、それぞれ溶接開始 (ArcLStart)、溶接継続 (ArcL)、溶接終了 (ArcLEnd) コマンド用の ABB 溶接テンプレートとして使用されます。これらのテンプレート内のパラメーター 'Seem'、'Weld'、'Weave' は、実際のコントローラー上の対応する溶接変数の名前と等しくなければなりません。
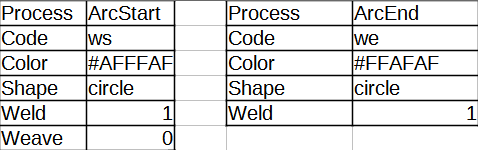
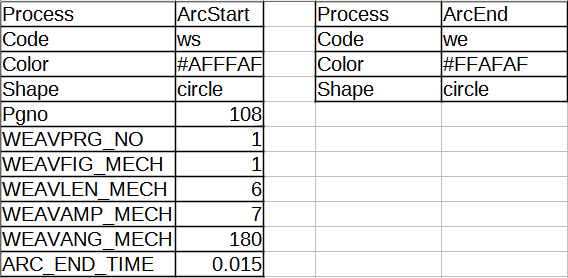
ファナック溶接テンプレート
fanuc_ws.csvおよびfanuc_we.csvテンプレートは、それぞれArcStartおよびArcEndコマンド用のファナック溶接テンプレートとして使用されます。ArcStartは、プロセス内で溶接モードを直接変更するために再度使用できます。これらのテンプレート内の「Weld」および「Weave」パラメーターは、実際のコントローラー上の対応する溶接変数の値と等しくなければなりません。
カワサキ溶接テンプレート
テンプレート kawasaki_ws.csv、kawasaki_wc.csv、 kawasaki_we.csv は、それぞれ溶接開始(WS)、溶接続行(WC)、溶接終了(WE)コマンド用の川崎溶接テンプレートとして使用されます。これらのテンプレート内の 'Weld' および 'Crater' パラメーターは、実際のコントローラー上の対応する溶接変数(例えば W1SET および W2SET 数)と等しくなければなりません。
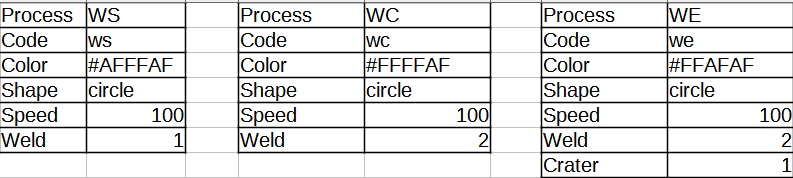
ヒント: RoboDKの「コード挿入」命令を使えば、溶接パラメータを持つW1SET命令やW2SET命令を追加することができます。
注:RoboDKの溶接コマンドはそれに続くムーブに適用されますが、AS言語の溶接コマンドはムーブの溶接パラメータをそのコマンドで指定された位置に設定します。
KUKA溶接テンプレート
kuka_ws.csv およびkuka_we.csv テンプレートは、それぞれ ArcStart および ArcEnd コマンド用のKUKA 溶接テンプレートとして使用されます。ArcStartテンプレート内のパラメータは、実際のコントローラ上の対応する溶接変数の値と等しくなければなりません。
モトマン溶接テンプレート
テンプレートmotoman_ws.csv、motoman_wc.csv、motoman_we.csvは、それぞれ溶接開始(ARCON)、溶接続行(ARCSET)、溶接終了(ARCOF)コマンド用のMOTOMAN溶接テンプレートとして使用されます。これらのテンプレート内のパラメーター 'ASF'、'ACOND'、'AEF' は、実際のコントローラー上の対応する溶接変数の値と等しくなければなりません。
