マーカーのインポート
RoboDK でマーカーをインポートして、ロボットや他のオブジェクトに対してマーカーの位置を示す必要があります。
マーカーを正しく配置するには、以下の手順に従ってください:
1.RoboDKステーションで、新しい参照フレームを作成します。
2.新しい参照フレームを右クリックし、"Add Item... "を選択します。
3.Fiducial Marker Generatorで作成したマーカーPNGを見つけて選択します。
4.仮想マーカーのスケールを実際のマーカーのサイズに合わせて調整します:
例Charuco Diamond のマーカーはデフォルトで 106.186mm x 106.186mm です。印刷するマーカーのサイズが 280mm x 280mm の場合、2.63688 → ( 280 / 106.186 ) のスケールファクターを適用する必要があります。これは、マーカーオブジェクトをダブルクリックし、[その他のオプション]→[スケールの適用]を選択することで実行できます。
5.マーカーの中心を参照フレームの原点に合わせ、Y軸をトップIDに向けます。
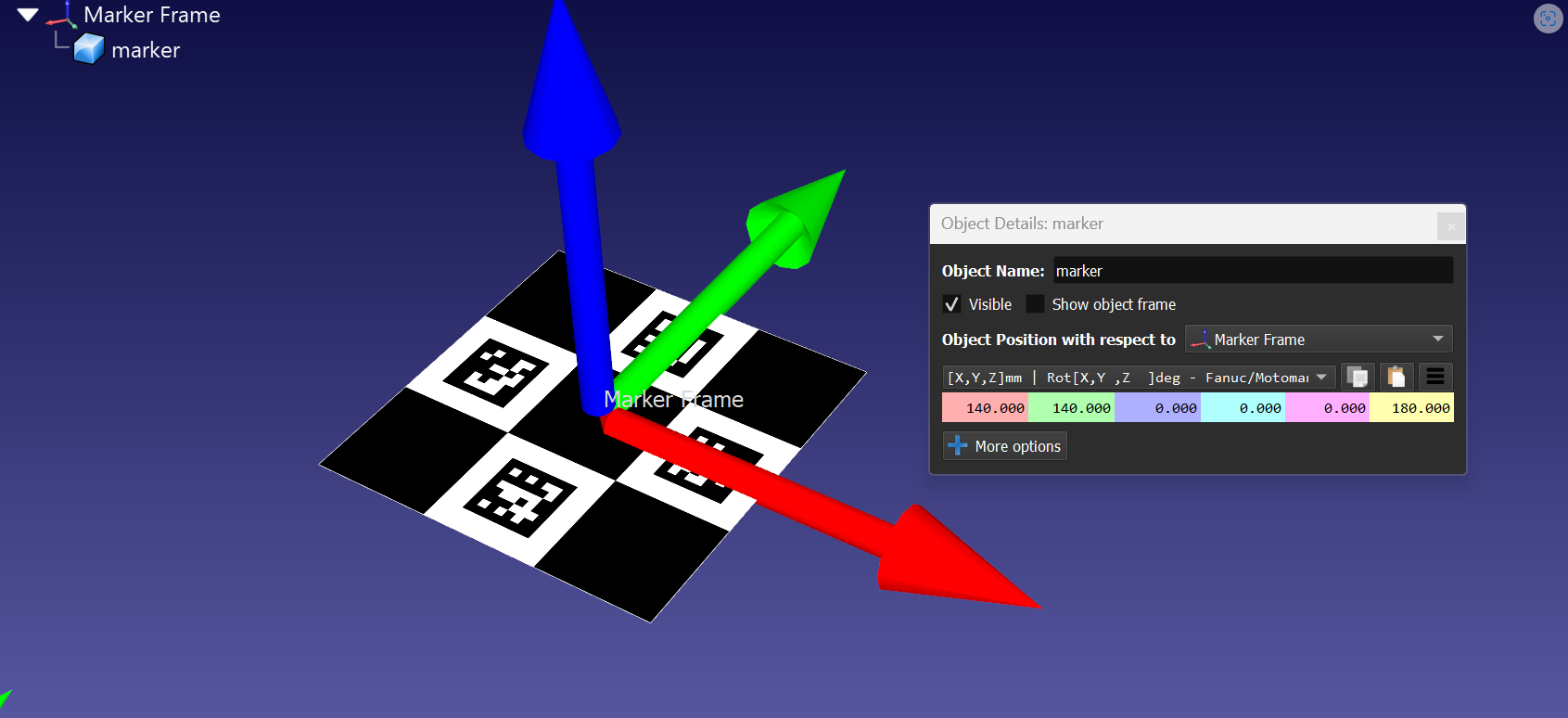
例マーカーを移動するには、マーカーオブジェクトをダブルクリックし、マーカーフレームに対してオブジェクトの位置を変更します。この例では、マーカーを X 軸上で 140mm 移動し、Y 軸上で 140mm 移動し、Z 軸上で 180° 回転する必要がありました。正しい位置の例については、下の画像を参照してください。
6.マーカーフレームをステーションに配置し、マーカーに対するステーションのオブジェクトの位置を合わせます。
ヒント:最終的なレンダリングでマーカーを隠したい場合は、仮想マーカーをステーションアセットの下に配置し、物理マーカーがスーパーインポーズされたアセットで隠れるようにします。