模擬カメラのセットアップ
ビデオフィードにステーションのアセットを正確にオーバーレイするには、シミュレーションカメラを作成する必要があります。このシミュレーションカメラは、フィデューシャルマーカーを使用して計算されたカメラのポーズと軌道を使用して、入力ビデオフィードと同じ角度、距離、軌道から RoboDK ステーションを記録します。
このシミュレートされたカメラの解像度は、マーカのスケーリングを正確に行うために入力ビデオと一致する必要があります。仮想カメラをステーションに追加する手順は以下のとおりです:
1.ツールバーの「画像処理エディタ」→「RoboDKカメラの追加」を選択してステーションにカメラを追加します。
2.カメラまたはカメラフィードを右クリックし、「カメラ設定」を選択します。
3.入力ビデオフィードの解像度に合うように、バーチャルカメラの設定を調整します。
4.シミュレートされたカメラが仮想Arucoマーカーを見ることができるように基準フレームを合わせます。
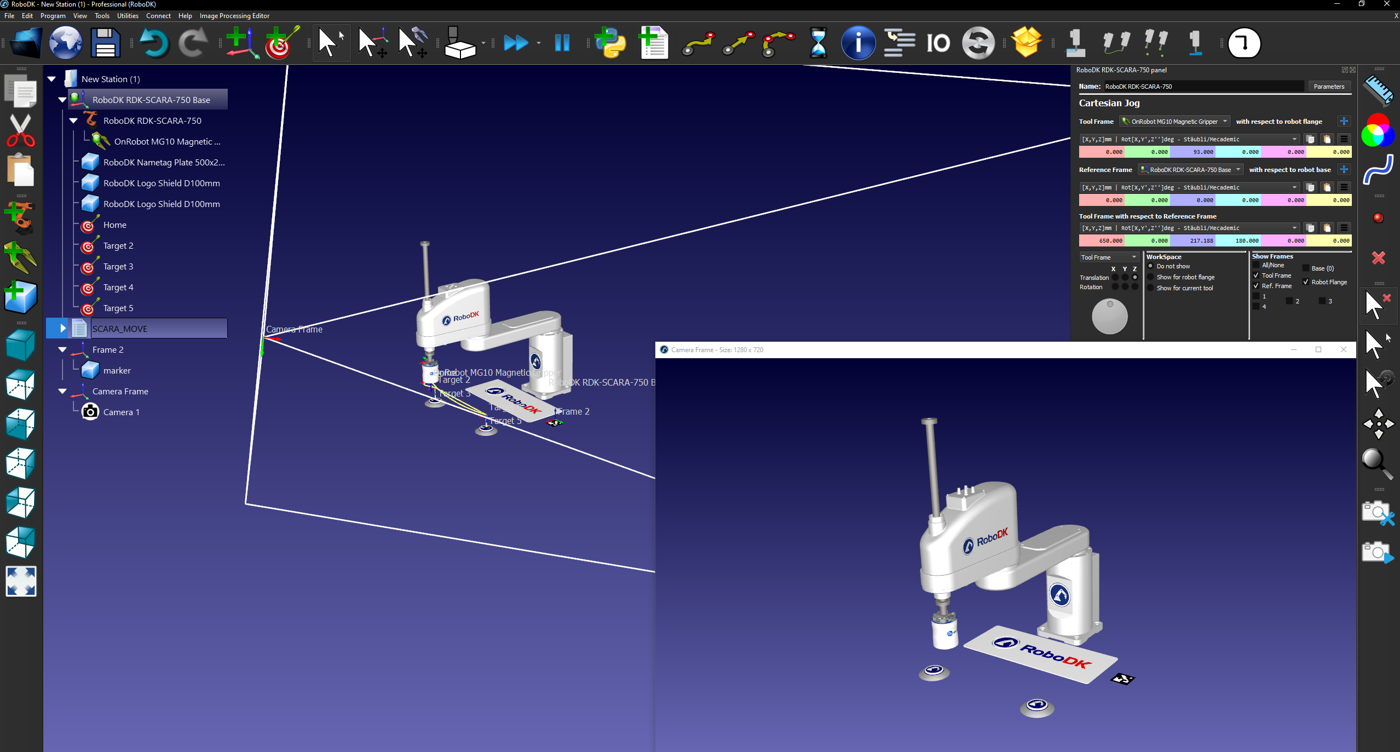
ヒント:必要に応じて焦点距離とワーキングディスタンスを調整することで、レンダリング時にすべてのステーションオブジェクトが表示されるようにすることができます。次の画像は、解像度 1280x720p で適切に設定された仮想カメラです。
最良の結果を得るためには、物理的な入力映像は以下の点に注意して録画してください:
1.マーカーは、明るい環境の平らな面に置いてください。最適な結果を得るためには、仮想ステーションのオブジェクトのサイズと距離を、マーカーと記録環境に応じて考慮してください。
2.一貫したカメラ設定(リアルカメラとシミュレートカメラの解像度が一致していること)。
3.読みやすいアルコID(カメラはIDを読みやすく保つ必要があります。避けるべきこと高速/不鮮明な映像、低いカメラ解像度、カメラからマーカーまでの距離が遠い)
4.ビデオは.mp4または.avi形式であることを確認してください。
ヒント:高解像度/FPSの入力フィードは、レンダリングに時間がかかることがあります。720p/60fpsを超える映像の場合、Camera ARのレンダリング時間が大幅に長くなり、FPSが低下することが予想されます。