カッター工具ライブラリ
カッターツールライブラリは、機械加工用工具、すなわちエンドミルのコレクションです。これらの工具やカッターは、ロボットのメインツール(例:スピンドル)に取り付けられるものです。
CAM - カッター工具ライブラリ、またはCAMツールバーの対応するアイコンを選択すると、カッター工具のライブラリが表示されます。

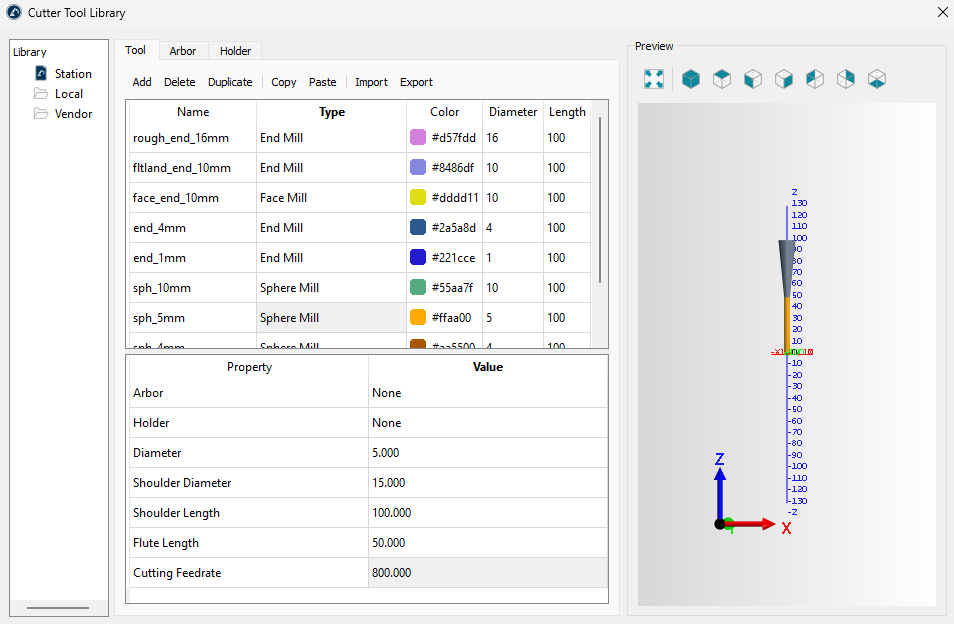
ライブラリウィンドウには、工具、アーバー、ホルダーを指定するための3つのタブが表形式で表示されます。
RoboDKステーションに既にロボット工具(カッター)が含まれている場合、それらはカッター工具ライブラリウィンドウに表示されます。ステーションにカッターがない場合は、ツールタブの「追加」ボタンを使用して、カッター工具ライブラリウィンドウで直接作成できます。
ツールタブの上部では、工具の種類を設定する必要があります。ここで工具の名前を変更したり、切断刃先の色を設定することも可能です。対応するフィールドを変更するには、ダブルクリックしてください。
ツールタブの下部では、現在の工具のパラメータを編集します。工具の種類によって、設定可能なパラメータのセットが異なります。例えば、エンドミルには主に直径、肩長、溝長、切断送り速度の3つのパラメータのみが設定可能です。
注記:肩長には切断部分の長さ(溝長)が含まれます。
注記:工具選択時に、切断送り速度の値はCAMプロジェクト設定の対応するフィールドに適用されます。
工具用アーバーおよびツールホルダーは、カッター工具ライブラリウィンドウの対応するタブで定義されます。
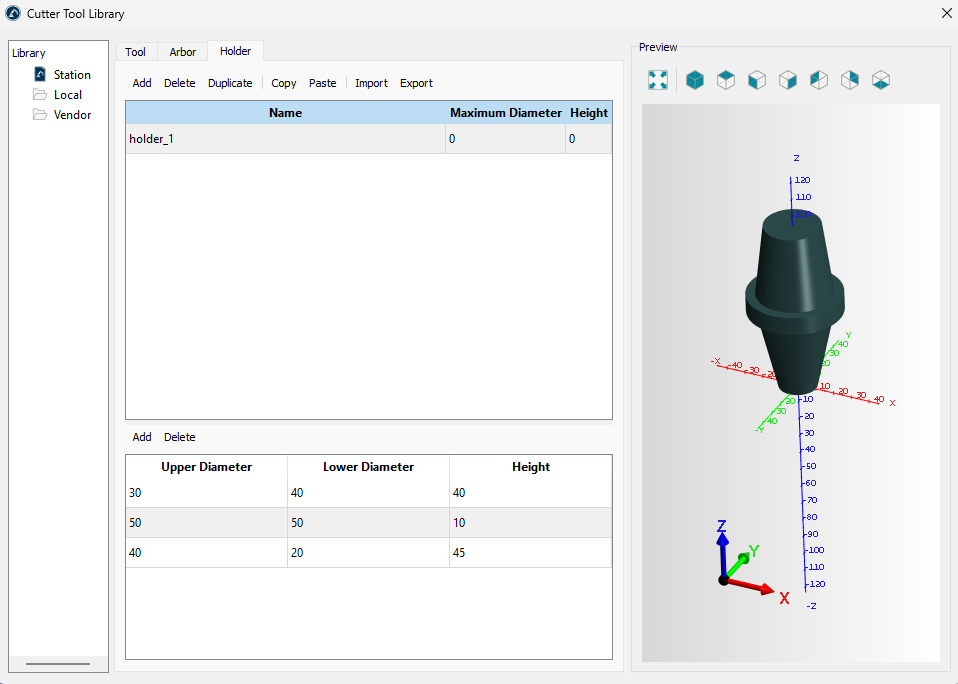
工具アーバーまたはホルダーは、通常、一連の円錐を組み合わせて表現されます。アーバーまたはホルダーータブの下部では、それぞれアーバーまたはホルダーを構成する円錐の幾何学的パラメータを指定できます。複数の工具が同時に同じホルダーまたはアーバーを使用することが可能です。
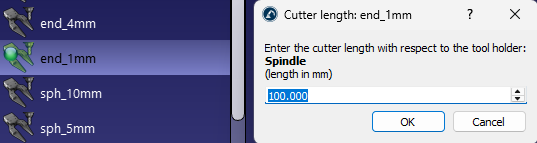
切断機能を備えたロボット工具も、RoboDK ではカッターとして扱われます。カッターを使用する場合、ホルダーの Z 軸に沿って TCP を調整することが可能です:
注記:アクティブな切削工具のモデルを取得し、RoboDKステーションツリーにモデルとして追加することが可能です。これを行うには、ロボットを右クリックし、「CAMツールメッシュを取得」コマンドを選択してください。