RoboDK CAM
はじめに
RoboDK CAMは、RoboDKソフトウェアにCAMソフトウェアの機能を追加します。RoboDK CAMは、RoboDK内のロボット、CNC、カスタム機構向けの様々な製造プロセスをサポートしております。これらの製造プロセスには、ミーリング、旋盤加工、切断、付加製造などが含まれます。また、RoboDK CAMでは材料除去のシミュレーションも可能です。
RoboDK CAMの主な操作は、アドインインストール後に表示されるツールバー上に配置されております:
注記:RoboDK CAMの機能をご利用いただくには、最新版のRoboDKをインストールする必要があります。
クイックスタートチュートリアル
このクイックスタートガイドでは、RoboDK CAMの機能の概要をご説明し、加工におけるRoboDK CAMの操作に慣れるお手伝いをいたします。
動画:以下の動画チュートリアルでは、RoboDK CAM https://www.youtube.com/watch?v=eiIgo303Mygの基本操作についてご説明しております。
RoboDK CAM のインストール
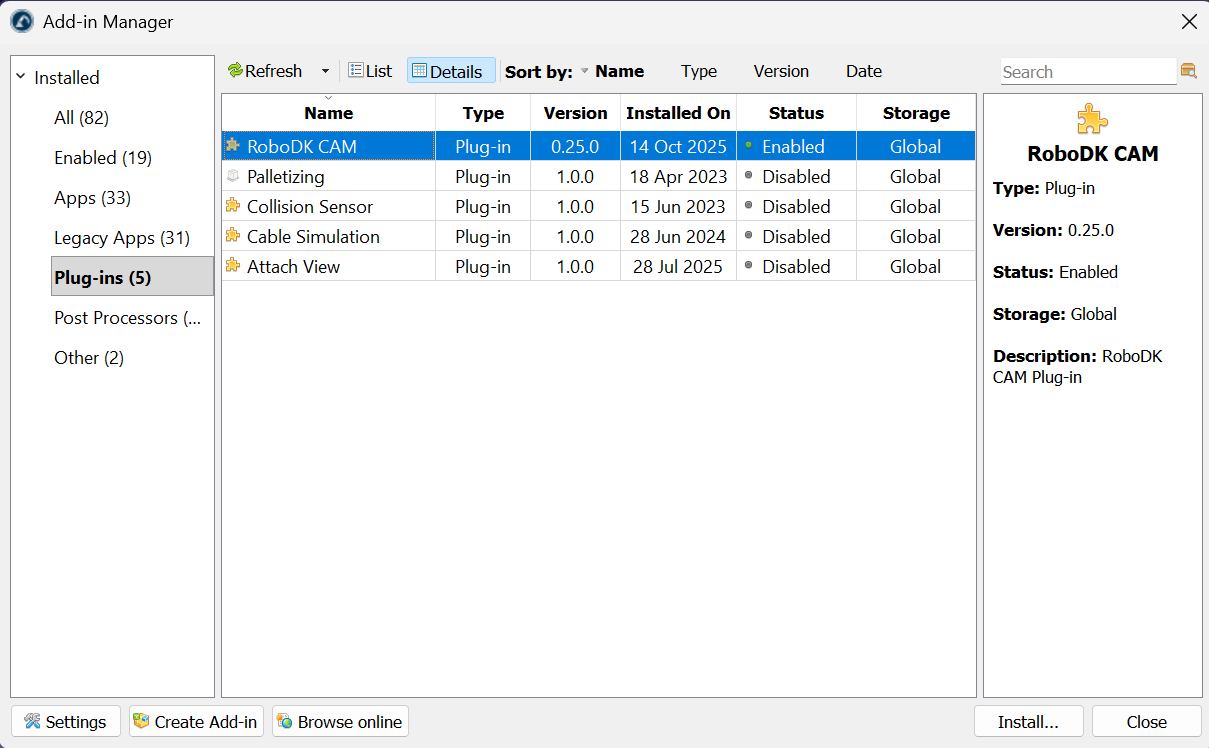
RoboDK CAMは、RoboDKでRoboDK CAM RDKPパッケージファイルを開くことでアドインとしてインストールできます。必ず最新版のRoboDKをご利用ください。
RoboDK CAM は Windows でのみサポートされています。
カッター工具ライブラリ
カッターツールライブラリは、機械加工用工具、すなわちエンドミルのコレクションです。これらの工具やカッターは、ロボットのメインツール(例:スピンドル)に取り付けられるものです。
CAM - カッター工具ライブラリ、またはCAMツールバーの対応するアイコンを選択すると、カッター工具のライブラリが表示されます。

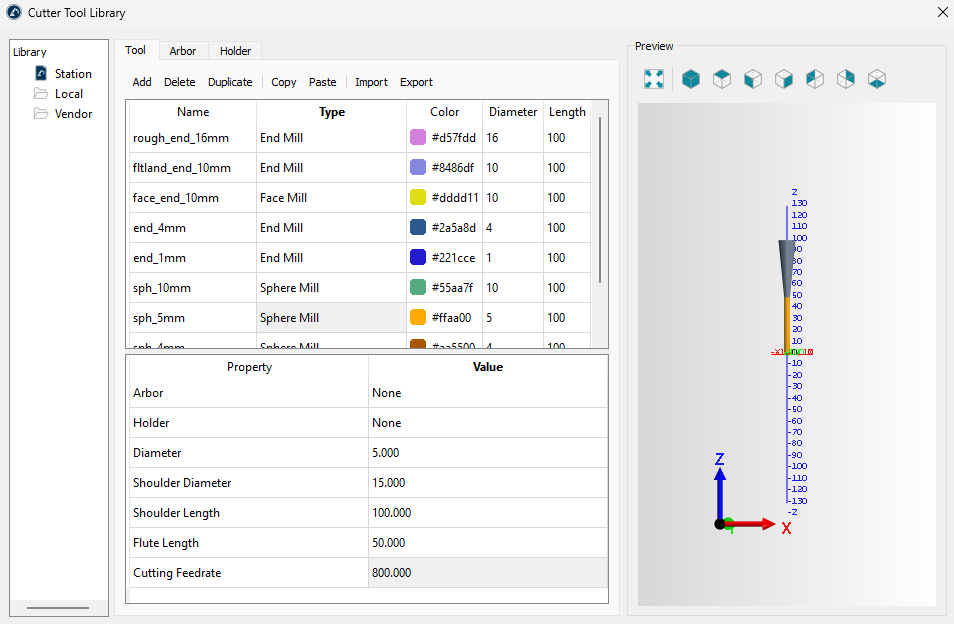
ライブラリウィンドウには、工具、アーバー、ホルダーを指定するための3つのタブが表形式で表示されます。
RoboDKステーションに既にロボット工具(カッター)が含まれている場合、それらはカッター工具ライブラリウィンドウに表示されます。ステーションにカッターがない場合は、ツールタブの「追加」ボタンを使用して、カッター工具ライブラリウィンドウで直接作成できます。
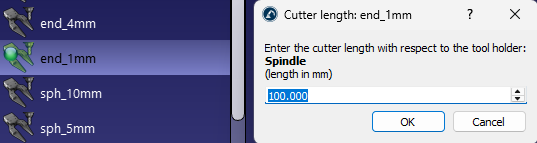
ツールタブの上部では、工具の種類を設定する必要があります。ここで工具の名前を変更したり、切断刃先の色を設定することも可能です。対応するフィールドを変更するには、ダブルクリックしてください。
ツールタブの下部では、現在の工具のパラメータを編集します。工具の種類によって、設定可能なパラメータのセットが異なります。例えば、エンドミルには主に直径、肩長、溝長、切断送り速度の3つのパラメータのみが設定可能です。
注記:肩長には切断部分の長さ(溝長)が含まれます。
注記:工具選択時に、切断送り速度の値はCAMプロジェクト設定の対応するフィールドに適用されます。
工具用アーバーおよびツールホルダーは、カッター工具ライブラリウィンドウの対応するタブで定義されます。
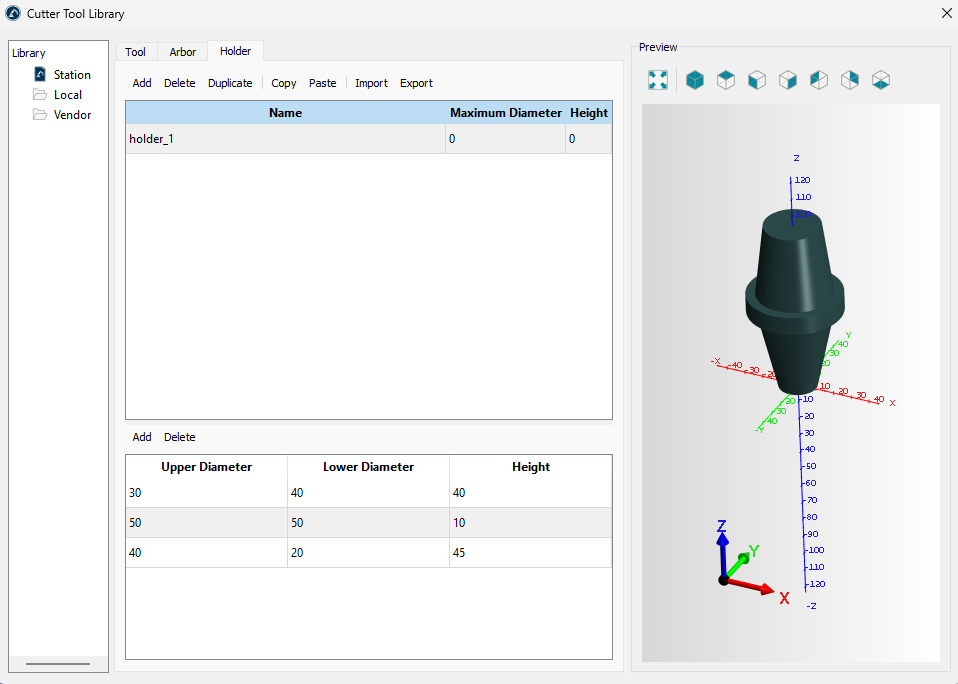
工具アーバーまたはホルダーは、通常、一連の円錐を組み合わせて表現されます。アーバーまたはホルダーータブの下部では、それぞれアーバーまたはホルダーを構成する円錐の幾何学的パラメータを指定できます。複数の工具が同時に同じホルダーまたはアーバーを使用することが可能です。
切断機能を備えたロボット工具も、RoboDK ではカッターとして扱われます。カッターを使用する場合、ホルダーの Z 軸に沿って TCP を調整することが可能です:
注記:アクティブな切削工具のモデルを取得し、RoboDKステーションツリーにモデルとして追加することが可能です。これを行うには、ロボットを右クリックし、「CAMツールメッシュを取得」コマンドを選択してください。
CAMプロジェクト
RoboDK CAMツールバーでは、作業に適した加工戦略を選択できます。

必要な戦略を選択すると、CAMプロジェクトが自動的に作成されます。
CAM設定
CAMプロジェクト設定ウィンドウは、上部セクションと「CAM」タブ、「ロボット」タブで構成されています。ロボット、参照座標系、カッターはウィンドウの上部セクションで選択します。デフォルトでは、CAMプロジェクト作成時にアクティブな要素が選択されています。

CAMタブ
CAMプロジェクトメニューのCAMタブには、本セクションで説明する加工設定およびその他の戦略設定が含まれます。
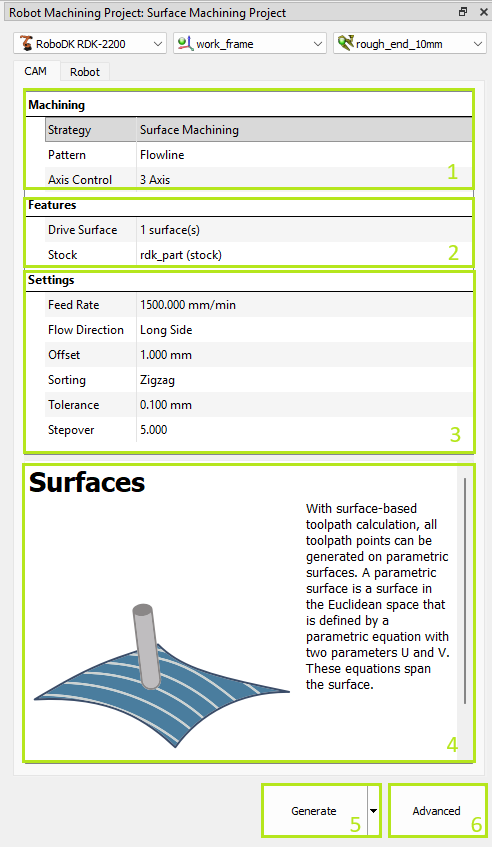
1.加工設定– 選択された戦略グループを示し、パターン間の切り替えが可能です。さらに、軸制御モードを選択できます。
2.フィーチャー設定 – 部品およびストックの選択されたフィーチャーを表示します。この選択は、ツールパスの計算に必須です。
3.戦略固有の設定。
4.ヒント – パラメータをクリックすると表示されます。
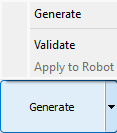
5.工具経路生成ボタン – 工具経路を計算し、選択したロボットに適用します。「検証」および「ロボットに適用」のサブオプションにより、複雑なツールパスの計算と適用を分離できます。
6.高度な戦略設定。
フィーチャー選択
フィーチャセクションでは、戦略に必要な幾何学的フィーチャを選択できます。戦略に応じて、サーフェス、曲線、または点を選択する必要があります。フィーチャ設定行をダブルクリックすると、セレクタ工具が起動します。
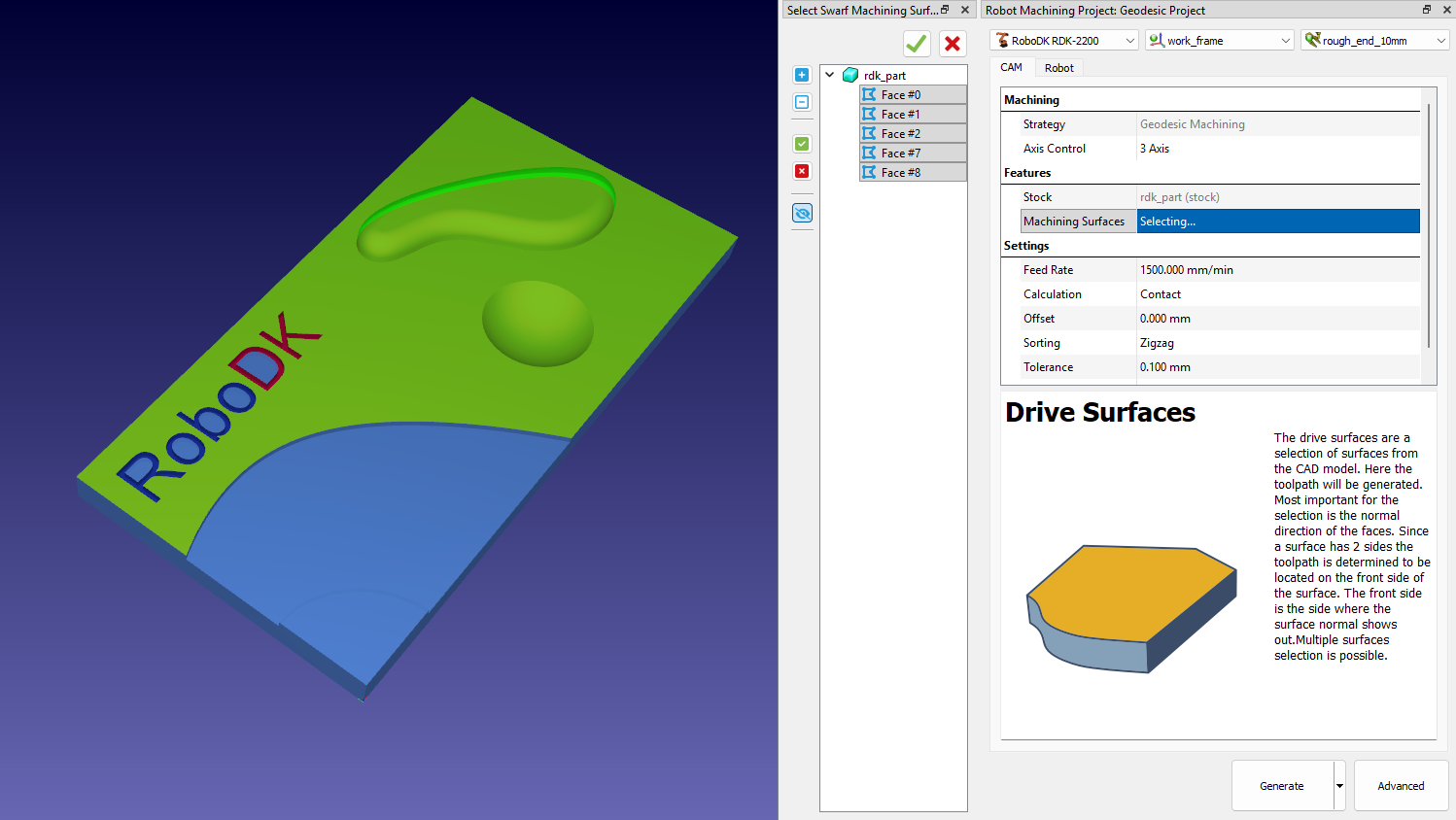

1.選択を適用 / セレクターを閉じる
2.ツリー要素を表示
3.展開済みツリー内のすべてを選択 / 選択を解除
4.すべてのフィーチャを表示 / 非表示
5.フィーチャーのツリー表示
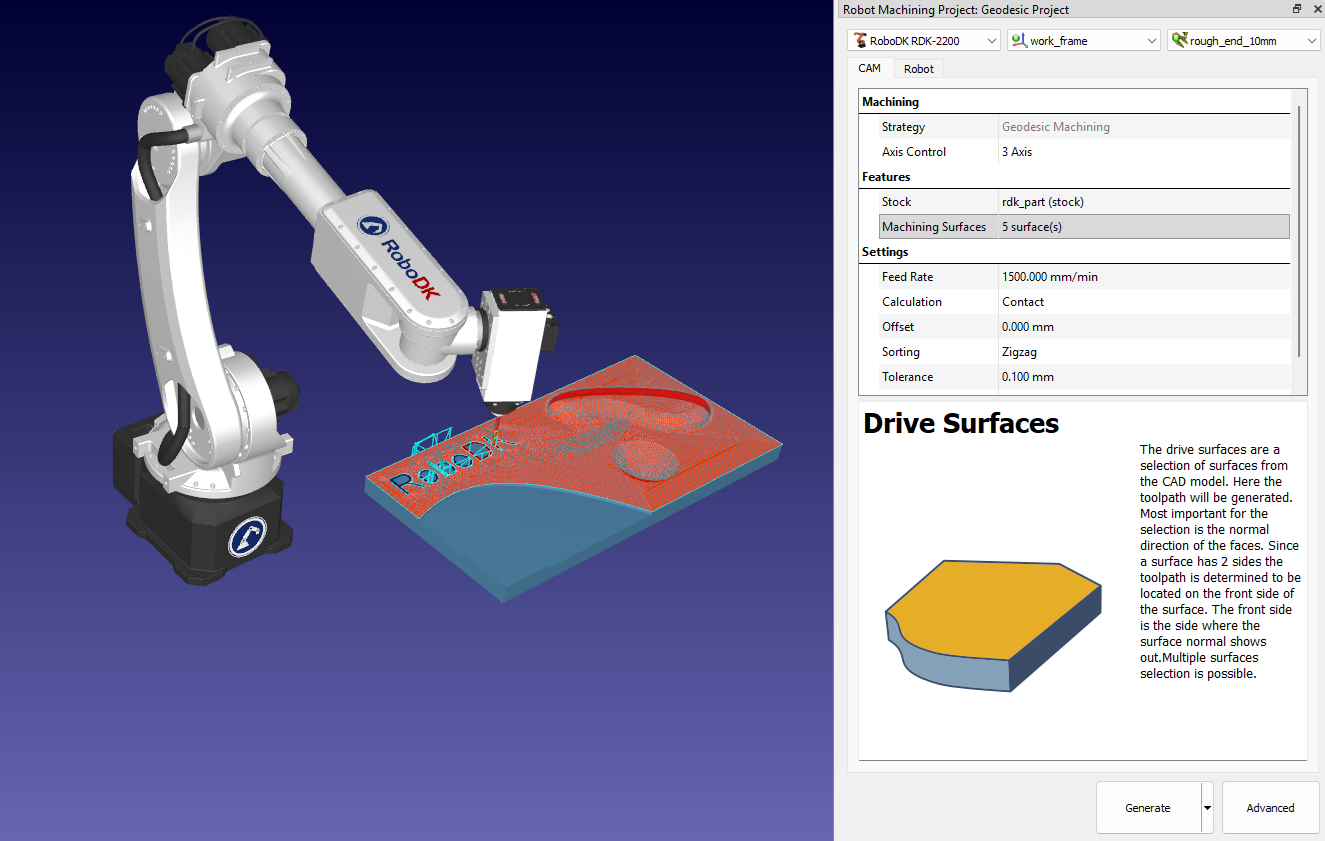
選択されたジオメトリフィーチャーは、セレクターラインをクリックすることで確認できます。
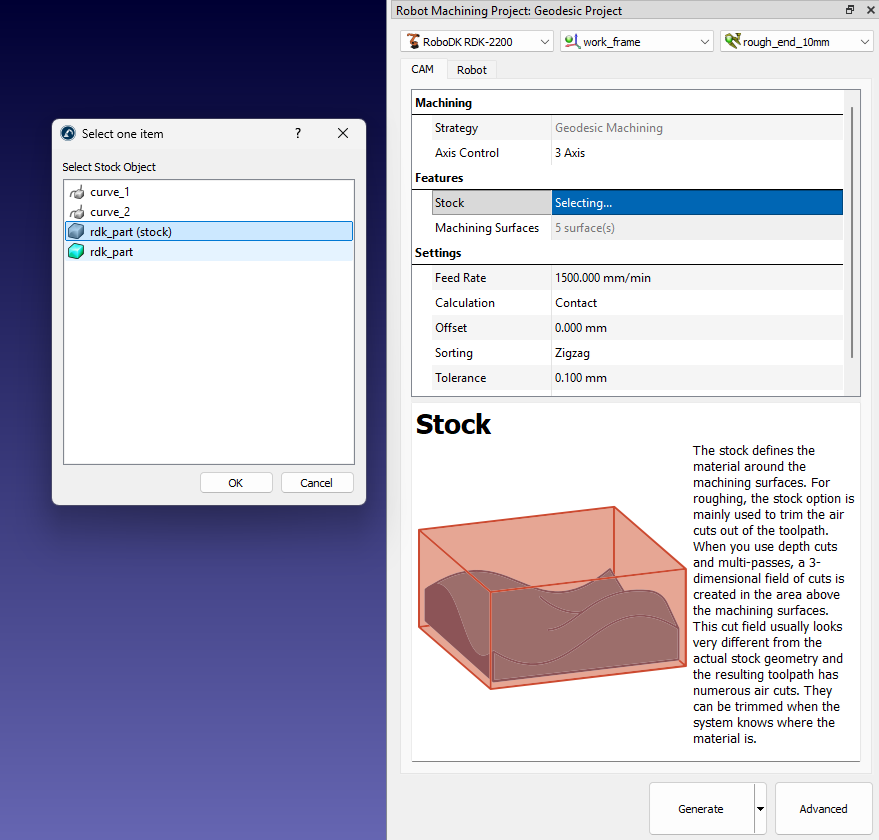
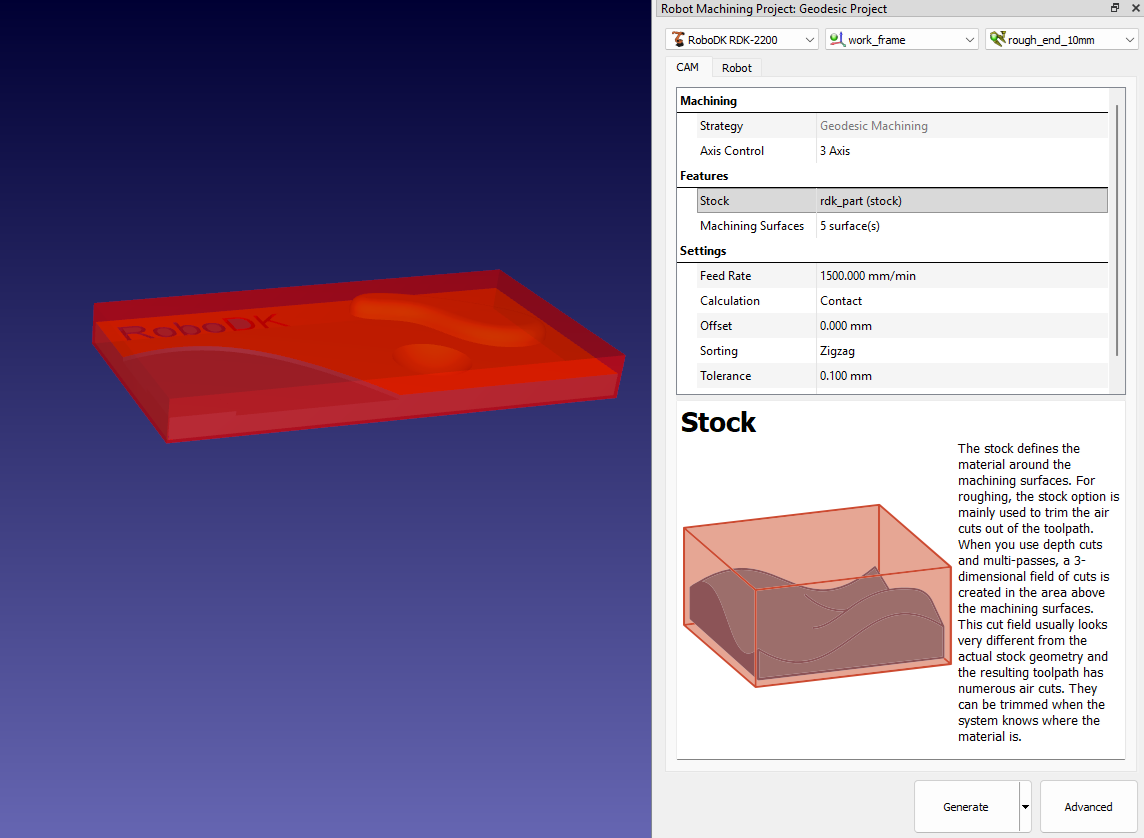
また、ストックとして使用するモデルを指定することも可能です。
ロボットタブ
CAMプロジェクトメニューの「ロボット」タブには、ロボットの動作に関する設定が含まれています。
これらの設定は、RoboDK のロボット加工プロジェクト設定にある設定と同じものです。
ツールパス戦略
RoboDK CAMでは、表面加工、穴あけ、荒加工などの加工戦略を使用することができます。さらに、材料除去プロセスをシミュレーションすることも可能です。

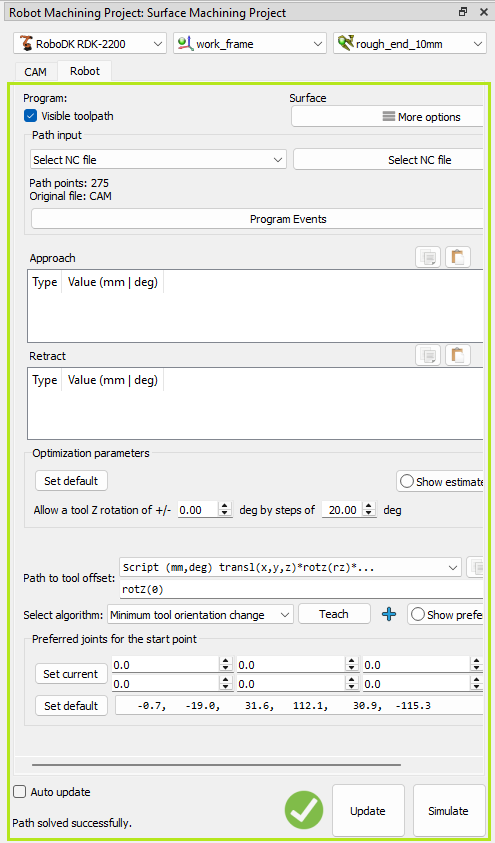
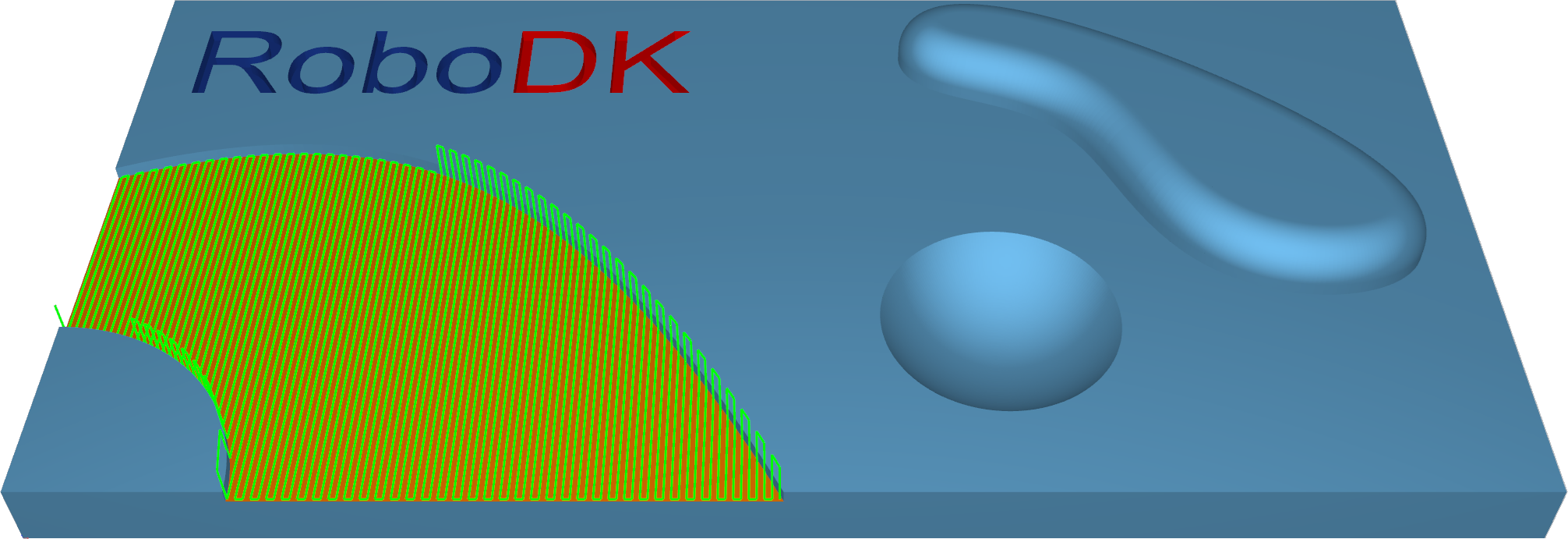
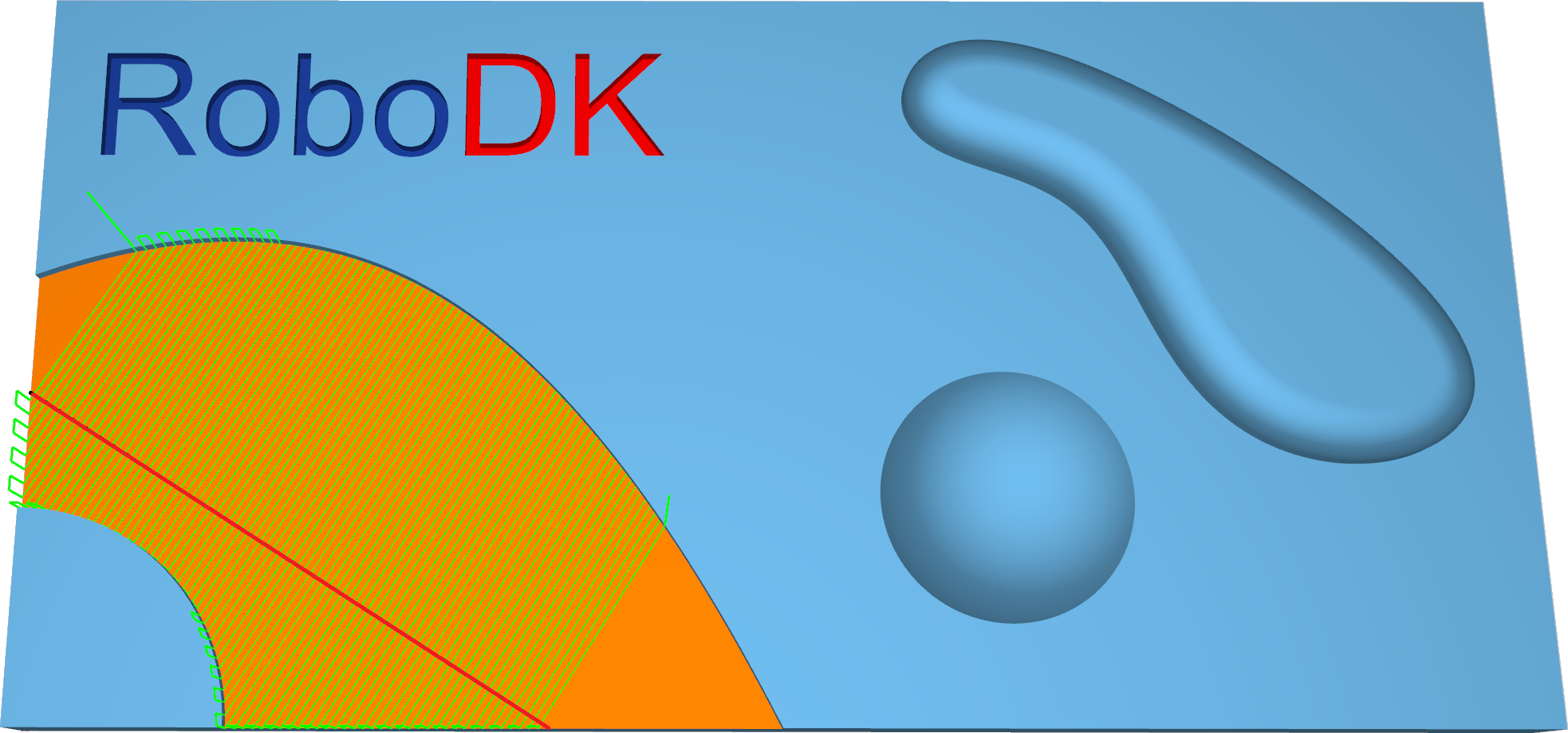
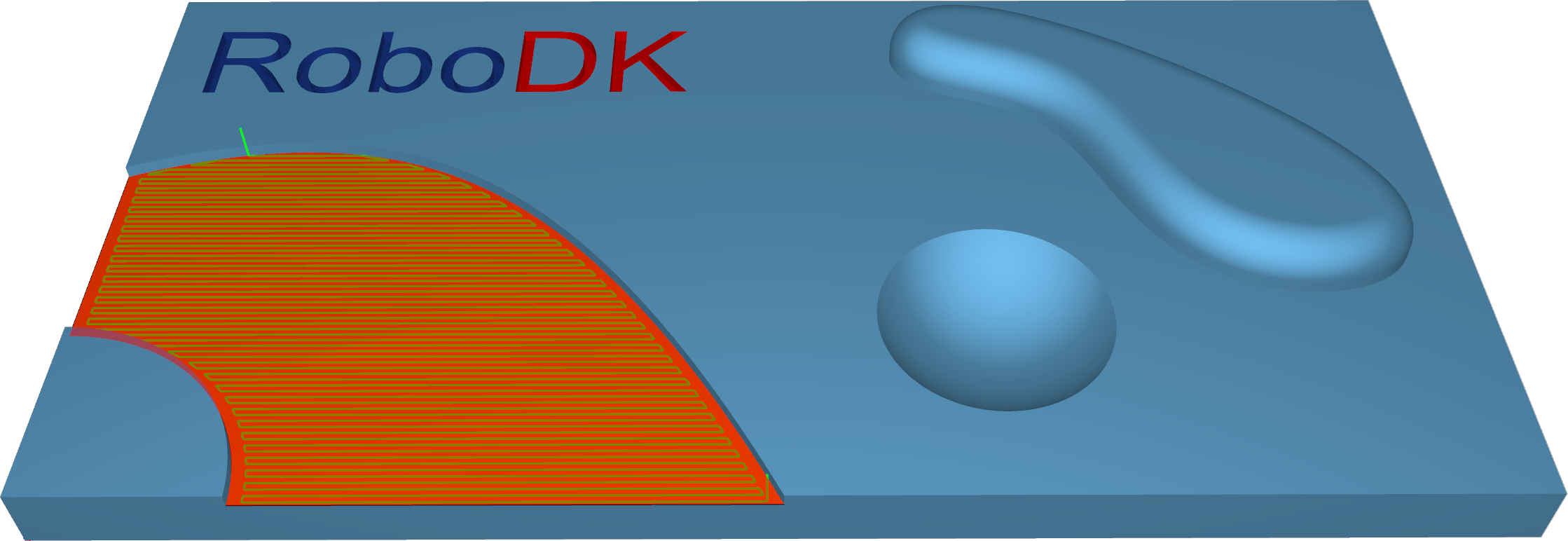
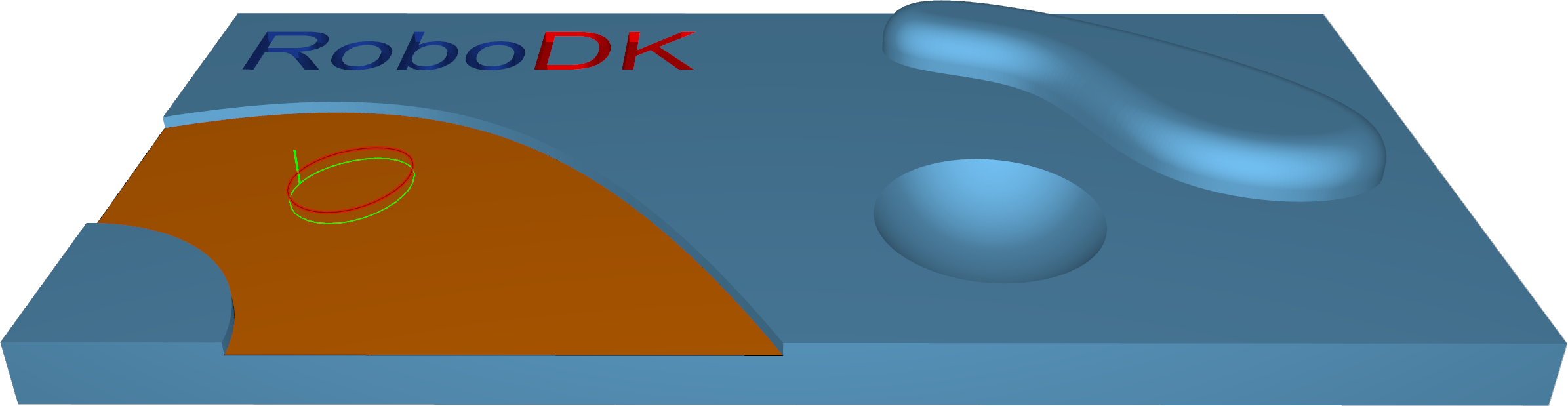
サーフェス–平行切断
平行カットオプションは、平行なスライスで構成されるツールパスパターンを作成します。スライスの向きは、X-Y(Z軸を中心にスライスを回転させる角度)とZの2つの角度で定義されます。リンゴを切断する様子を想像してください。上から下へ、あるいは左から右へ、平行にナイフで切断することができます。ダイアログ内の画像は、角度を使用して希望の切断方向を設定する方法を象徴しています。
ステーション: CAM-Surfaces-ParallelCuts
動画: https://youtu.be/I0hbofHp7Aw
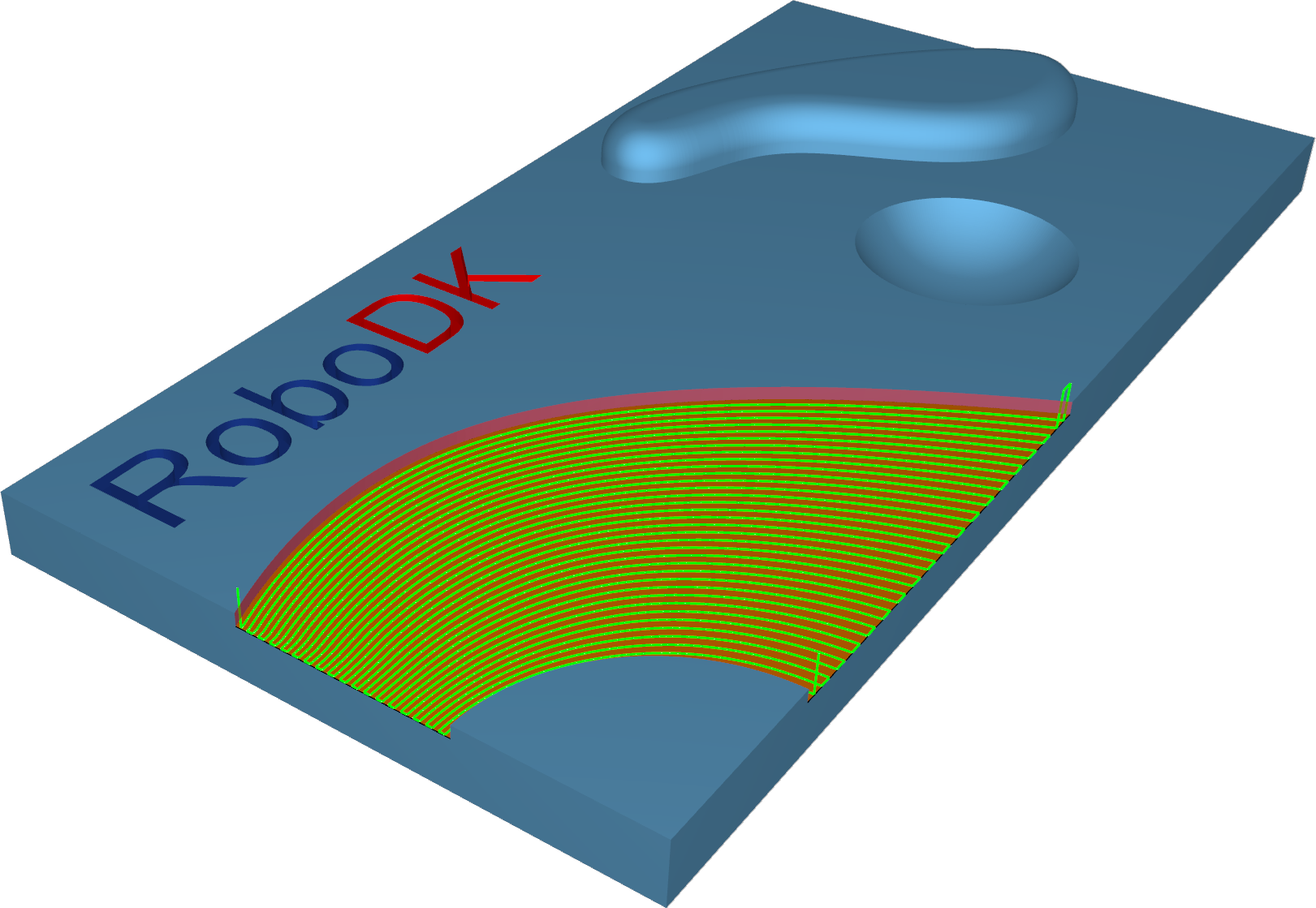
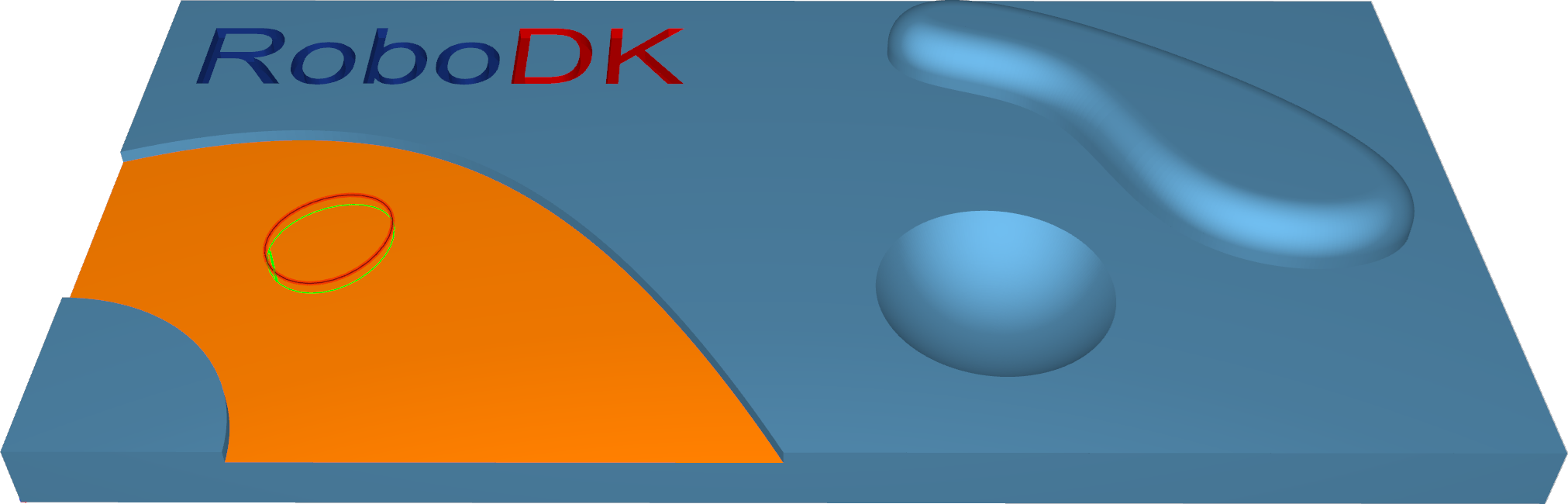
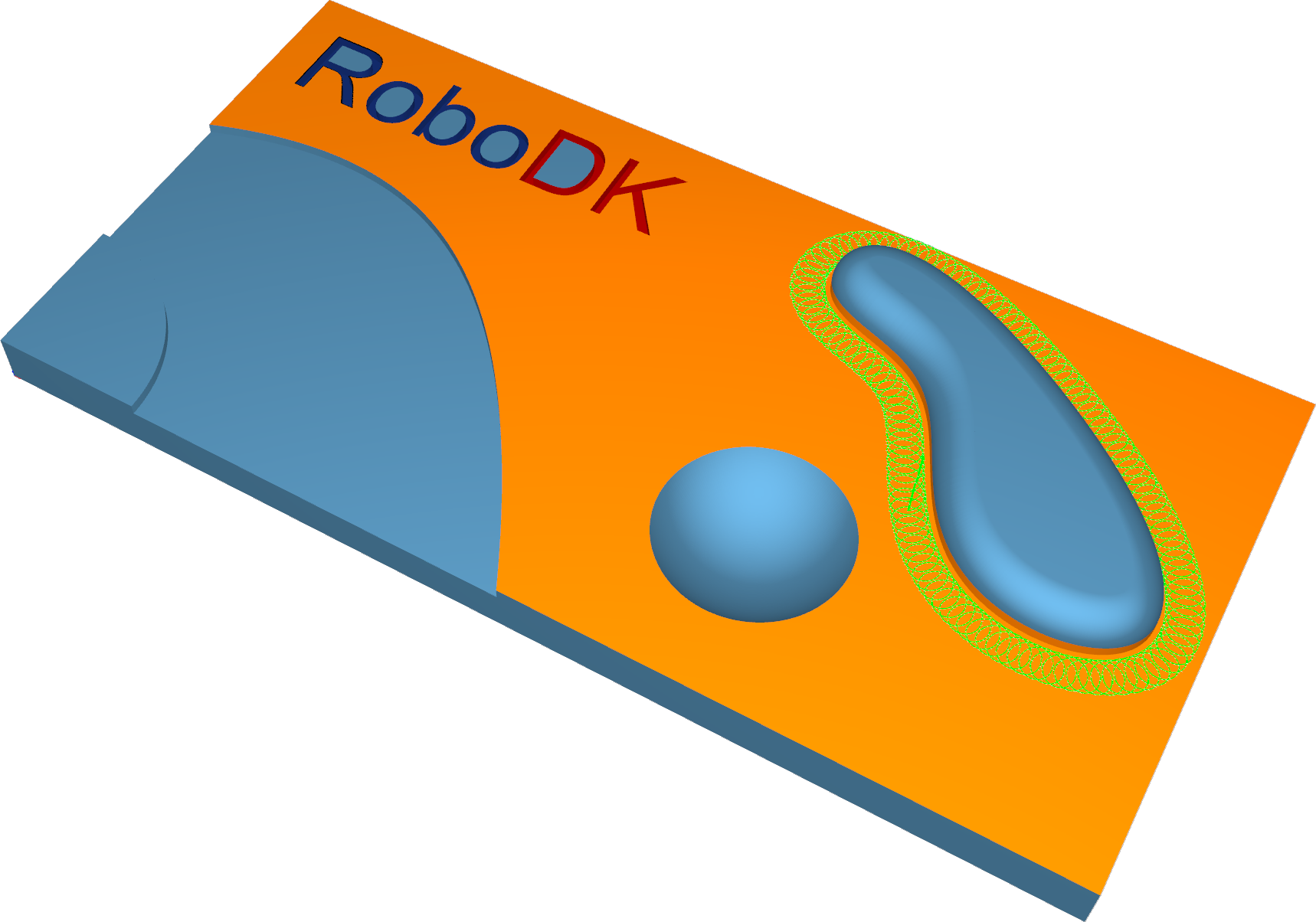
サーフェス–曲線に沿った切断
曲線に沿った切断パターンでは、駆動曲線に対して直交するツールパスを作成できます。つまり、「リード」として選択した曲線が直線でない場合、切断線は互いに平行にはなりません。
ステーション: CAM-Surfaces-CutAlongCurve。
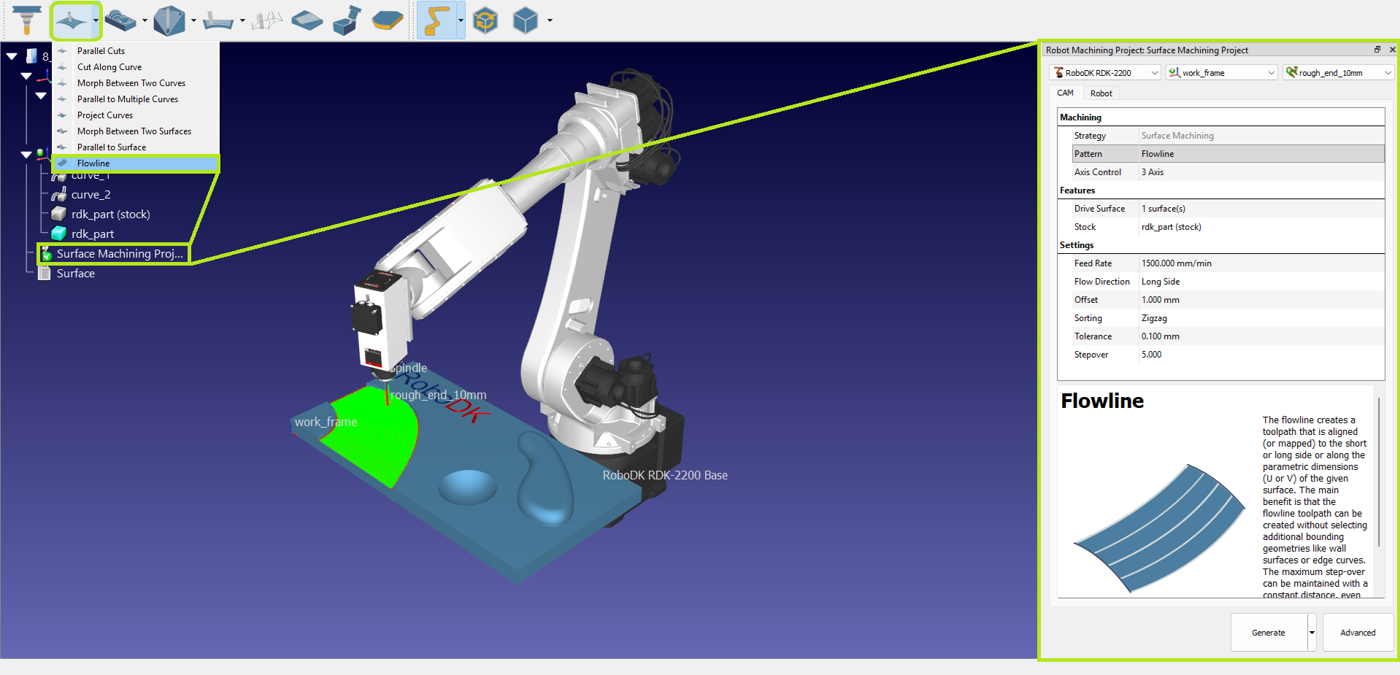
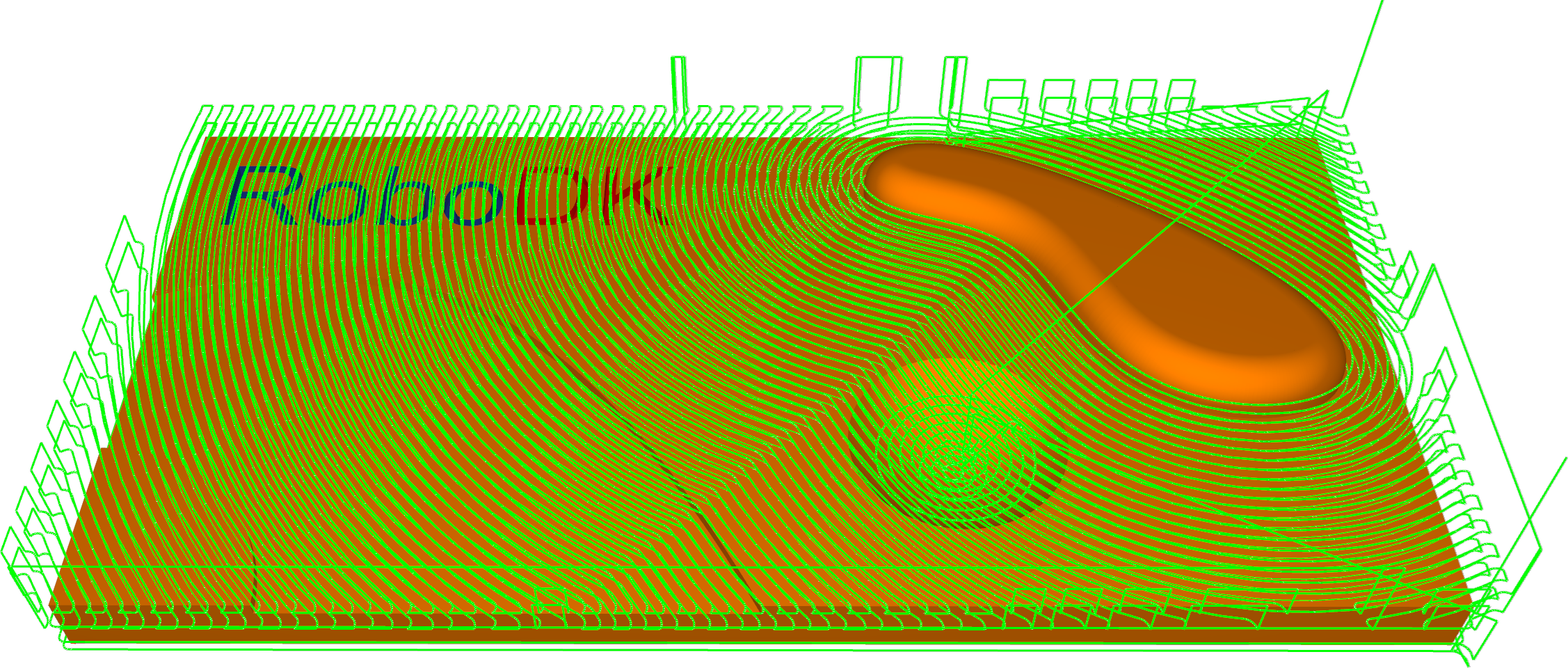
サーフェス – フローライン
フローラインは、指定されたサーフェスの短辺または長辺、あるいはパラメトリック寸法(UまたはV)に沿って整列(またはマッピング)されたツールパスを作成します。
主な利点は、壁面やエッジ曲線などの追加の境界形状を選択することなく、フローラインのツールパスを作成できることです。サーフェスのトポロジーが非常に複雑な場合でも、最大ステップオーバーを一定距離で維持できます。また、計算時間も非常に高速です。
ステーション: CAM-Surfaces-Flowline.
動画: https://youtu.be/YZFn8q0A1Vs
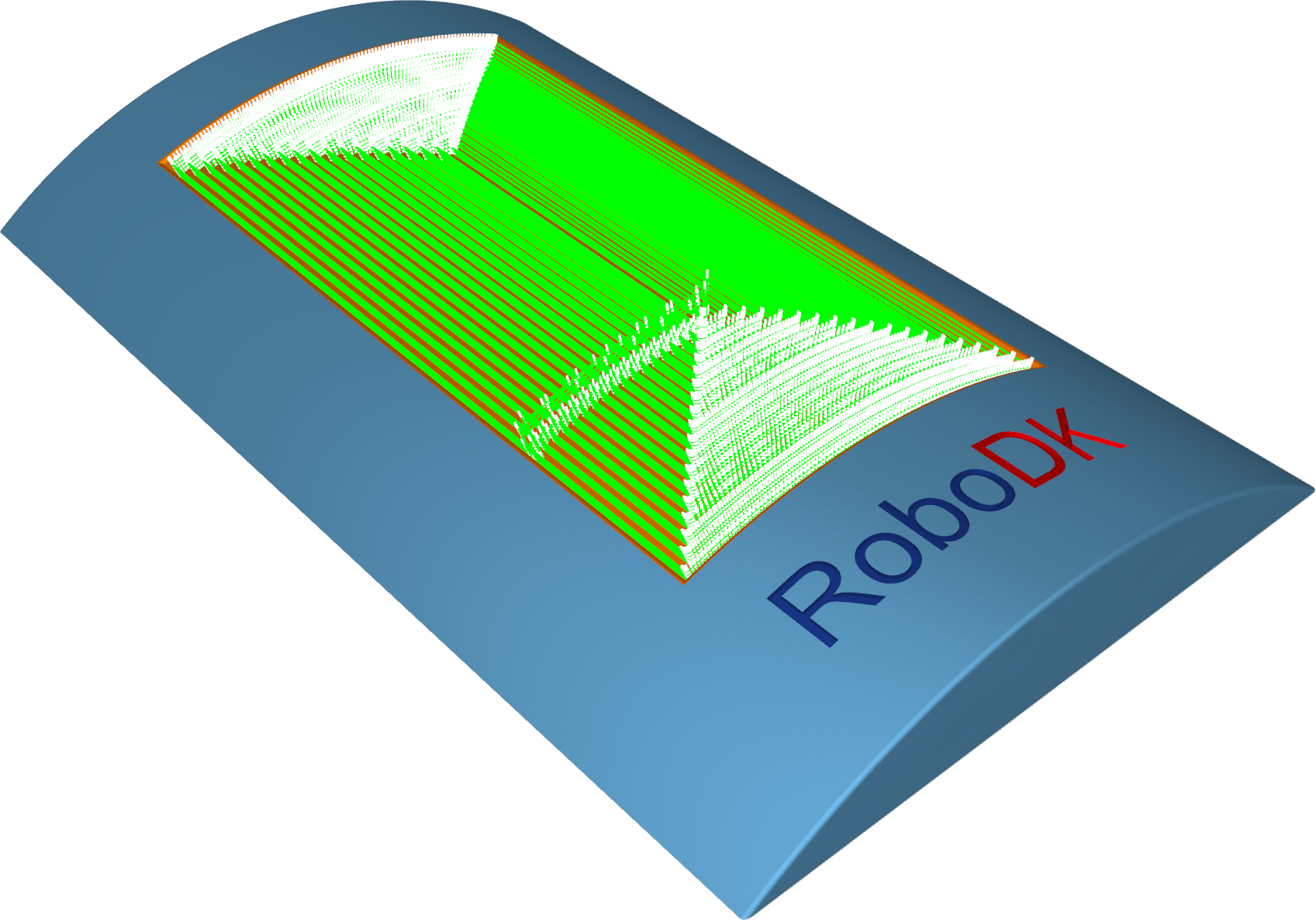
サーフェス–2つの曲線間のモーフィング
このオプションは、入力された「First」と「Second」の2つの先行曲線間にモーフ加工ツールパスを作成します。モーフとは、生成されたツールパスが2つの曲線間で徐々に補間され、表面全体に均等に広がることを意味します。
このオプションは、金型製作時の急勾配領域の加工に最適です。
ステーション: CAM-Surfaces-MorphBetween2Curves.
動画: https://youtu.be/p5E87245CVs
サーフェス–2つのサーフェス間のモーフ
このオプションは、駆動面に沿ったモーフツールパスを作成します。駆動面は2つのチェック面によって囲まれています。モーフとは、生成されたツールパスがチェック面間で近似され、駆動面に均等に分散されることを意味します。特に、ねじれたタービンブレードを持つインペラーの加工にこのオプションが活用できます。
バイタンジェンシー - 主な利点は、工具を駆動面に合わせて補正し、ワークピースの左右コーナーにあるチェック面を検証できる点です。必要な操作は、工具半径(マージン)オプションを有効にすることのみです。これは工具中心と表面間の距離を指します。
ステーション: CAM-Surfaces-MorphBetween2Surfaces.
動画: https://youtu.be/5KfPuzAIxQA。
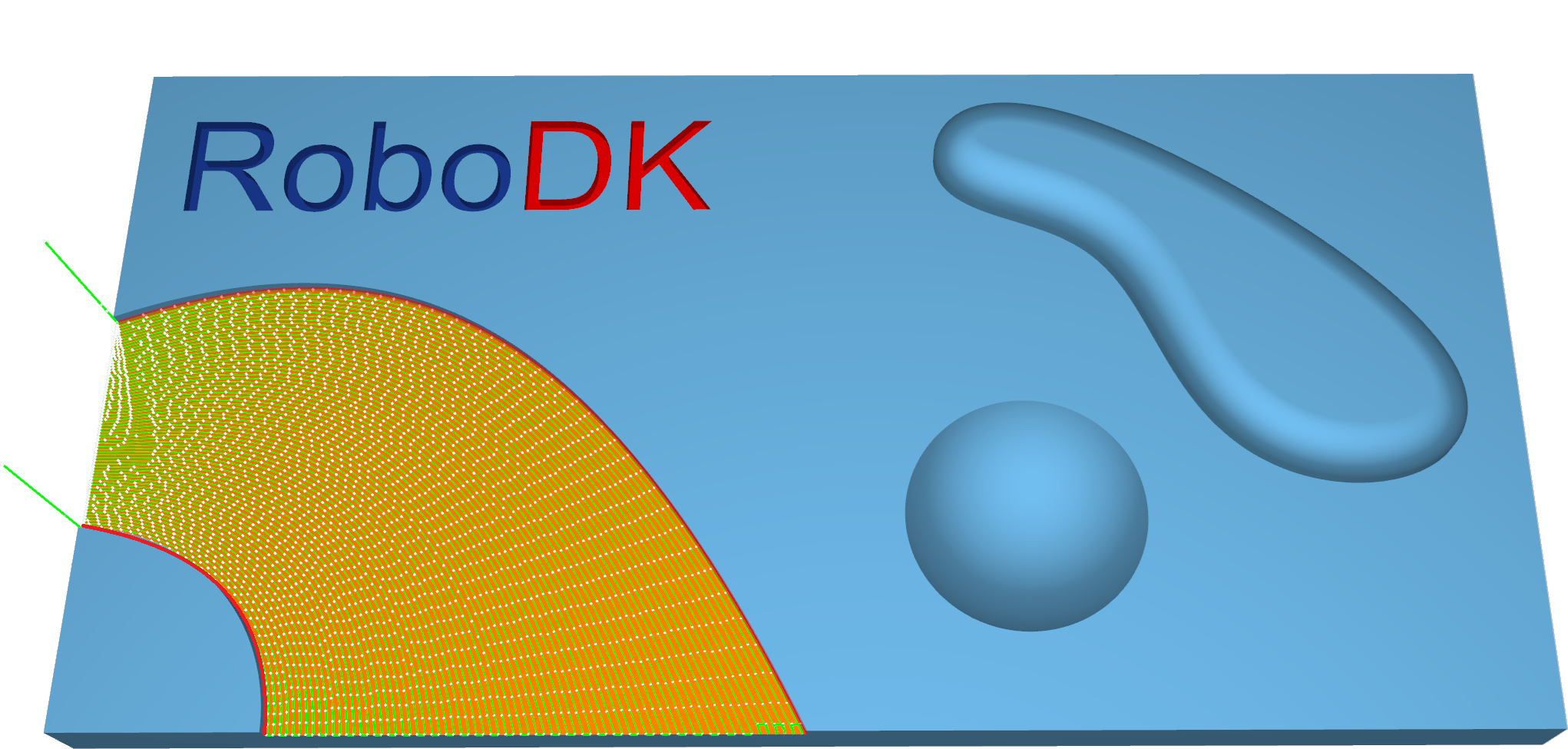
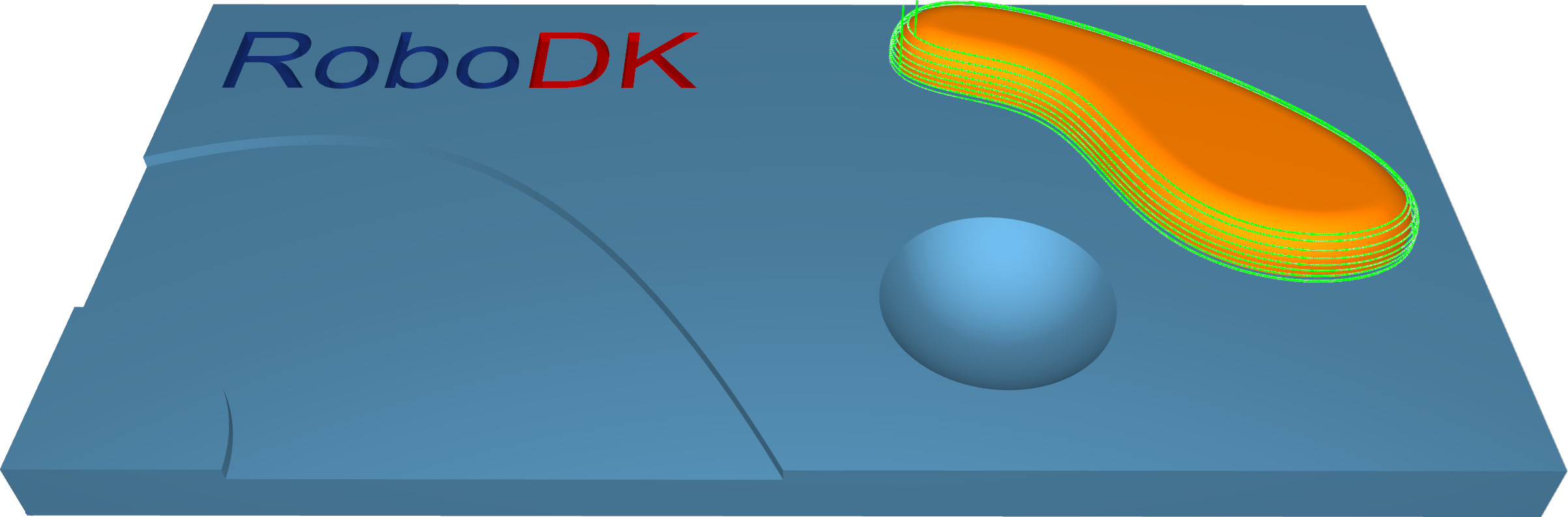
サーフェス–複数曲線に平行
「曲線に平行」オプションは、先行曲線に平行なツールパスセグメントを生成します。隣接するツールパスセグメントは互いに平行になります。重要な点は、切断が単純に隣り合って複製されるわけではないことです。新しい切断は常に前の切断からオフセットされます。
重要な注意点:
1.曲線は必ずサーフェスのエッジ上に正確に位置している必要があります。したがって、最適な曲線はエッジそのものです。これはツールパス生成において非常に重要です。エッジに正しく整列した適切な先行曲線がない場合、誤ったツールパスが生成される可能性があります。
2.同一表面上の独立した曲線については、最初の曲線のみが使用されます。複雑なモデルの場合、モデル全体を加工するための適切な先行曲線を指定することが困難になることを意味します。
3.同一表面上の連続する曲線については、全ての曲線を単一の曲線に結合する必要があります。この作業は任意のCADシステムから実行可能であり、システムによる自動化も可能です。
4.同一サーフェス上の独立した曲線については、最初の曲線のみが使用されます。複雑なモデルの場合、モデル全体を加工するための適切な先行曲線を提供することは困難です。
5.独立したサーフェス上で選択された複数の曲線は、各サーフェス上で異なる切断を生成します。
6.隣接する2つのツールパスセグメント間の距離は、最大ステップオーバーとなります。
7.マージンを定義することで、工具がエッジから特定の距離にある正確な位置を取得できます。
8.「複数の曲線に平行」パターンでは、複数の曲線を複数のサーフェスに使用することが可能です。各曲線は、最も近いサーフェスにのみ使用されるようになります。
ステーション: CAM-Surfaces-Parlallel2MultipleCurves
動画: https://youtu.be/5OIkm7d73KE。
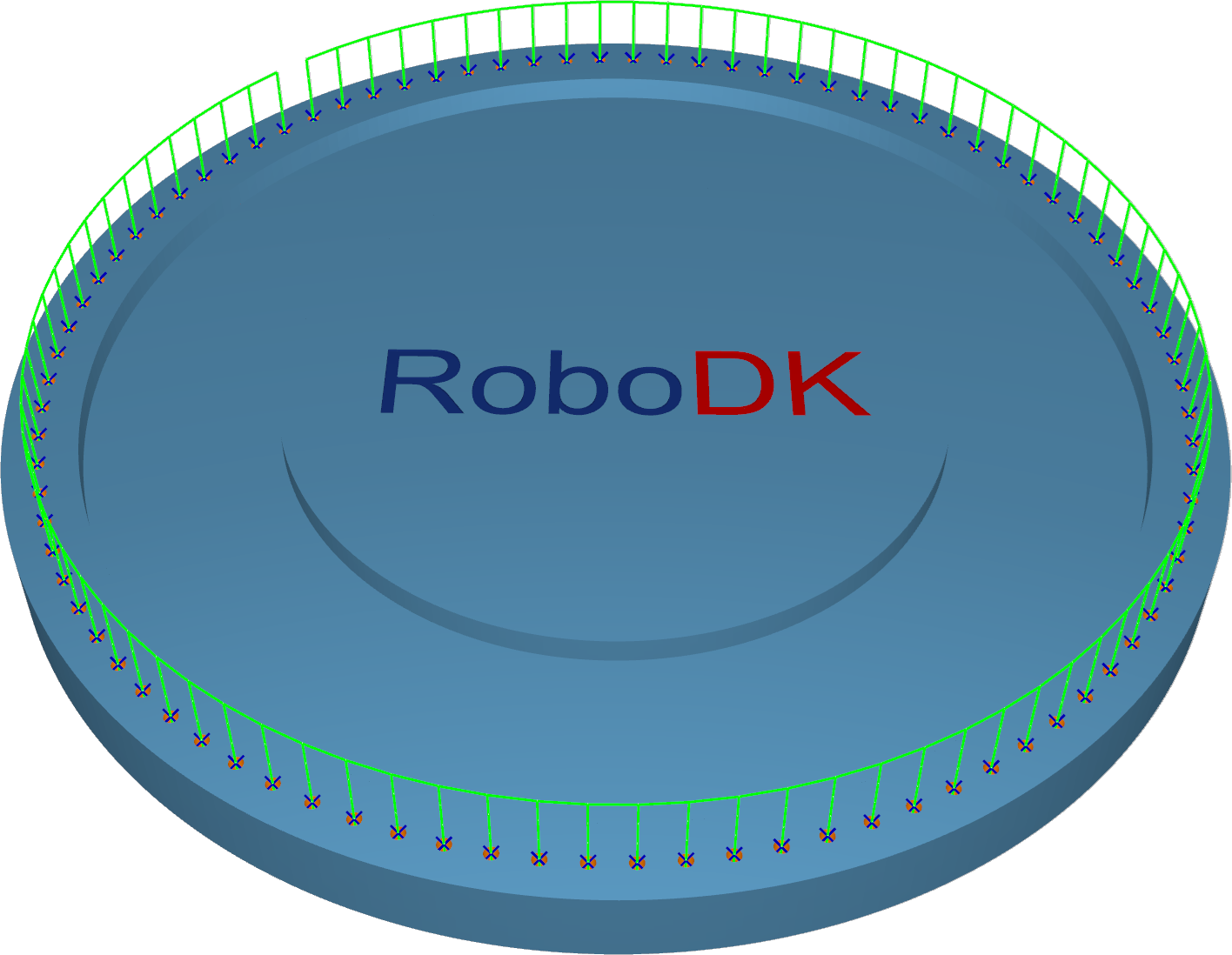
サーフェス–サーフェスに平行
サーフェスに平行は、先行サーフェスに平行な切断をドライブサーフェス上に作成します。
ステーション: CAM-Surfaces-Parallel2Surface.
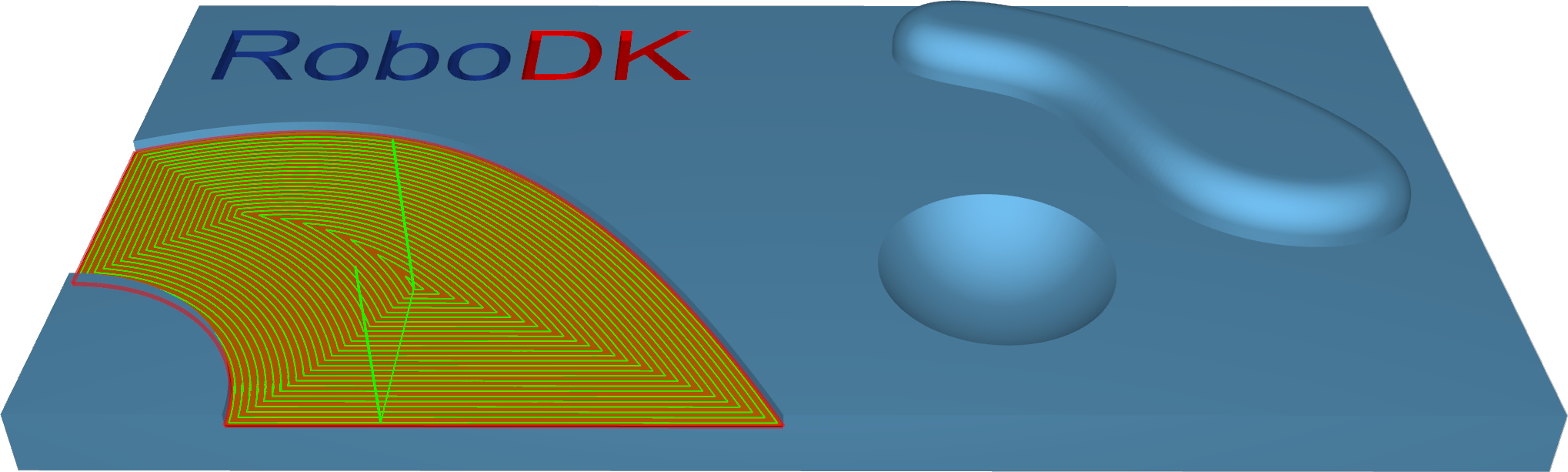
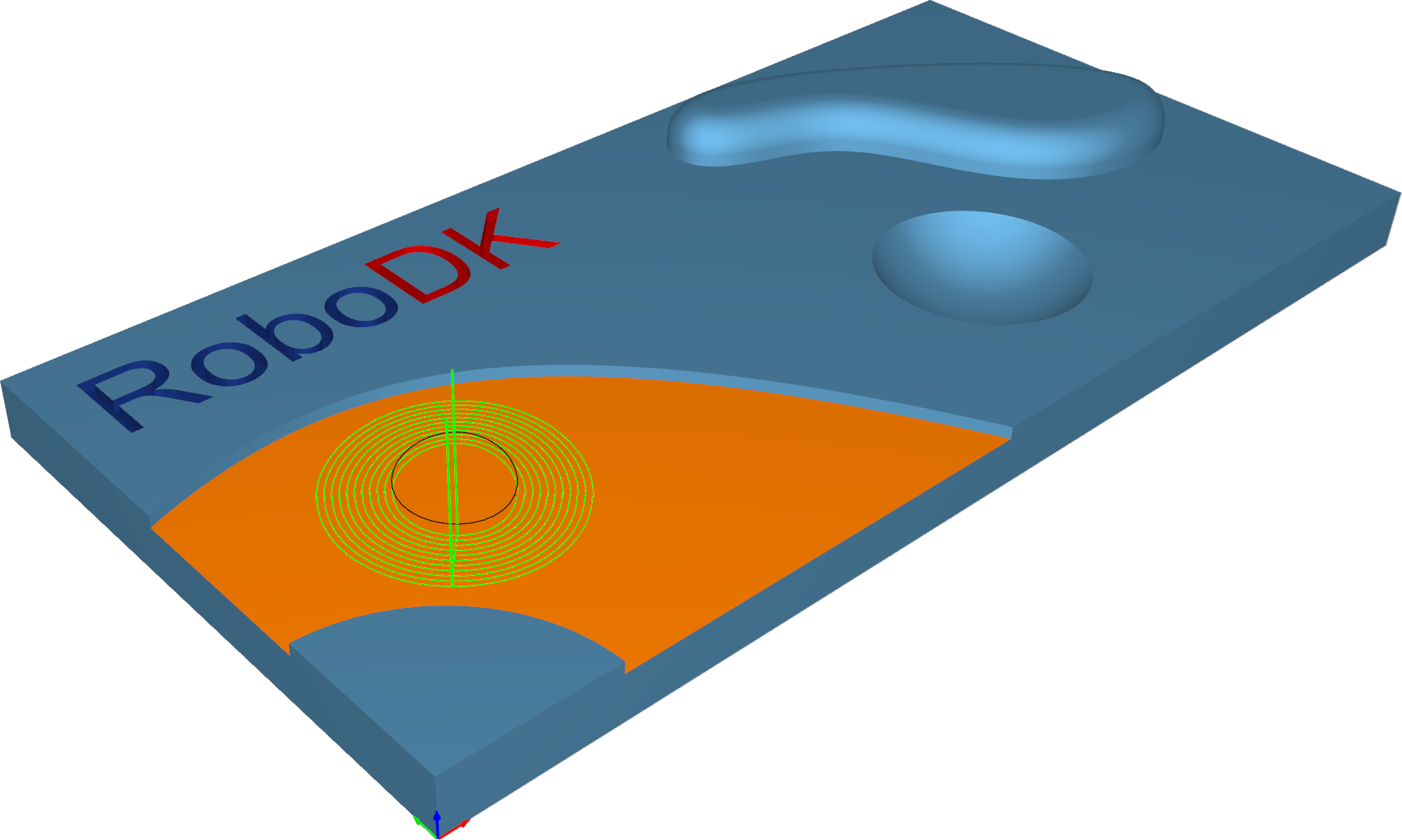
サーフェス–曲線を投影
このパターンを用いることで、ユーザー定義の曲線または汎用パターンを作成することが可能です。2次元パターン投影には放射状と螺旋状の2種類、3次元曲線投影にはオフセットとユーザー定義の2種類がございます。
ステーション: CAM-Surfaces-ProjectCurve.
動画: https://youtu.be/mVvjR2g8IIs。
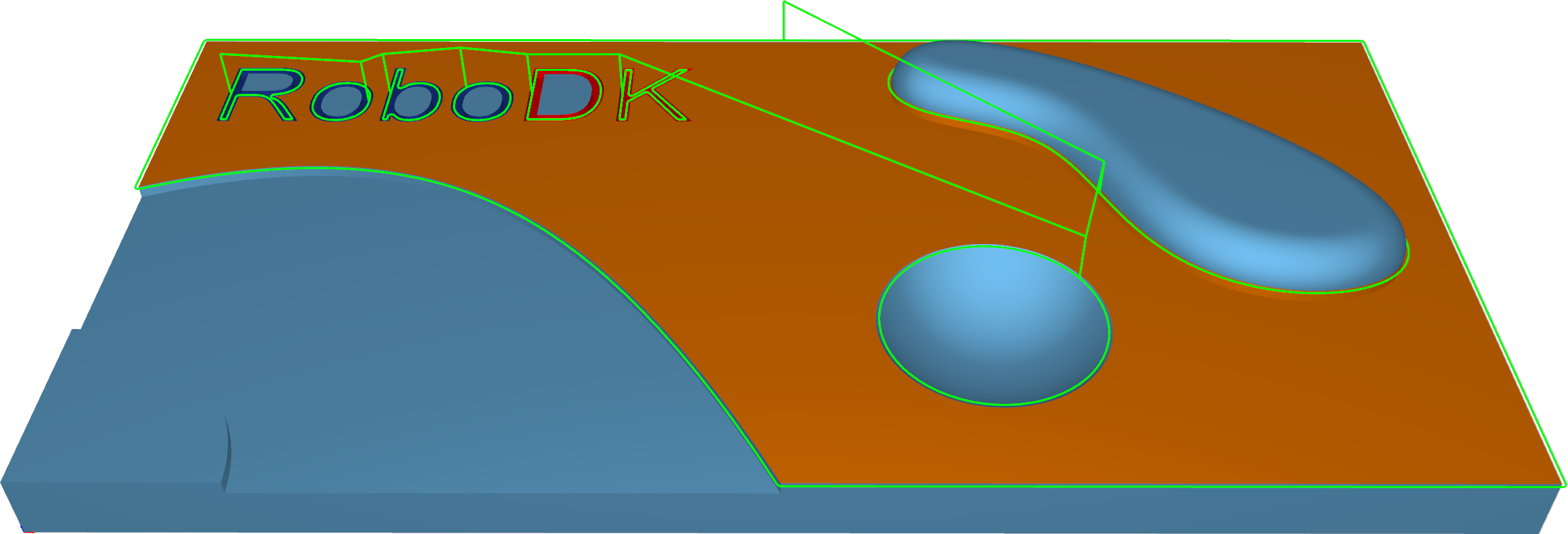
トリメッシュ–荒加工
荒加工は加工の最初の段階です。この戦略は、過剰な材料を非常に迅速に大量除去し、中仕上げおよび仕上げ戦略用に少量のストックを残すために使用されます。この戦略を使用して、矩形または中空形状のブロックから荒削り部品を作成できます。
ツールパスは、上から下に向かって順次Zレベルごとに材料を切断します。「深さステップ」パラメータは、2つのZレベル間の距離を定義します。ツールパスはモデルのスライスから作成され、外側へオフセットされます。2つのオフセット間の距離はステップオーバーで定義されます。ツールパスセグメントはブロックの限界までトリミングされます。結果として、部品全体に階段状の効果を持つラフ部品が生成されます。この部品は、オフセットフィールドで定義された値の厚さ分、仕上げ部品とは異なります。
注記:ストックモデルが定義されていない場合、部品は閉じたポケット構造である必要があります。そうでない場合、ツールパスを生成できません。
注記:部品に開放ポケットがある場合、または一般的に開放形状である場合は、ストックを定義するか、2Dコンテインメントを定義する必要があります。
ステーション: CAM-Trimesh-荒加工。
動画: https://youtu.be/QEnm8L2JrqM。
Trimesh–平行切断
この戦略では、X軸およびY軸に対して互いに平行なツールパスで3D部品を加工することが可能です。「XY平面での加工角度」パラメータを使用することで、XY平面内の任意の角度を設定できます。
この戦略は、部品の半仕上げまたは仕上げ加工に一般的に使用されます。浅い加工領域に最適です。
ステーション: CAM-Trimesh-ParallelCuts.
動画: https://youtu.be/fW8qyMV4a6Y
Trimesh–曲線投影
曲線投影戦略では、2Dまたは3Dの曲線パターンを三角メッシュに投影し、ツールパスを作成します。
ステーション: CAM-Trimesh-ProjectCurve.
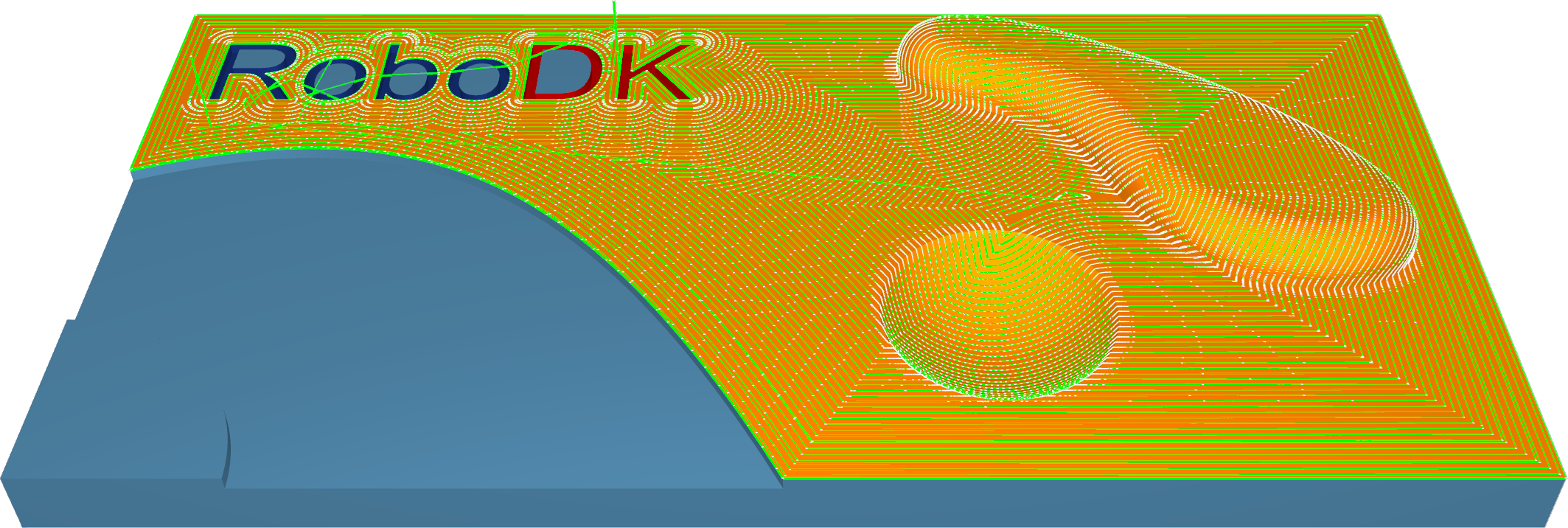
Trimesh–定数Z
この戦略では、加工方向に依存する平面に平行なツールパスで3D部品を加工することが可能です。部品を上から下へスライスするイメージです。
この戦略は、部品の半仕上げまたは仕上げ加工に一般的に使用されます。3D部品の垂直またはほぼ垂直な壁面など、急勾配の領域を加工するのに最適です。
1.定Z + 定尖頭:このパターンにより、急勾配部と緩勾配部から成る部品を1回のパスで加工できます。急勾配部は定Zスライスで加工され、緩勾配部には定尖頭が適用されます。
2.定Z + 平行切削:このパターンにより、急峻な領域と緩やかな領域から成る部品を1回の加工工程で加工することが可能となります。急峻な領域は定Zスライスを用いて加工され、緩やかな領域の加工には平行切削が適用されます。
ステーション: CAM-Trimesh-ConstantZ.
動画: https://youtu.be/0sD2NfplFrs。
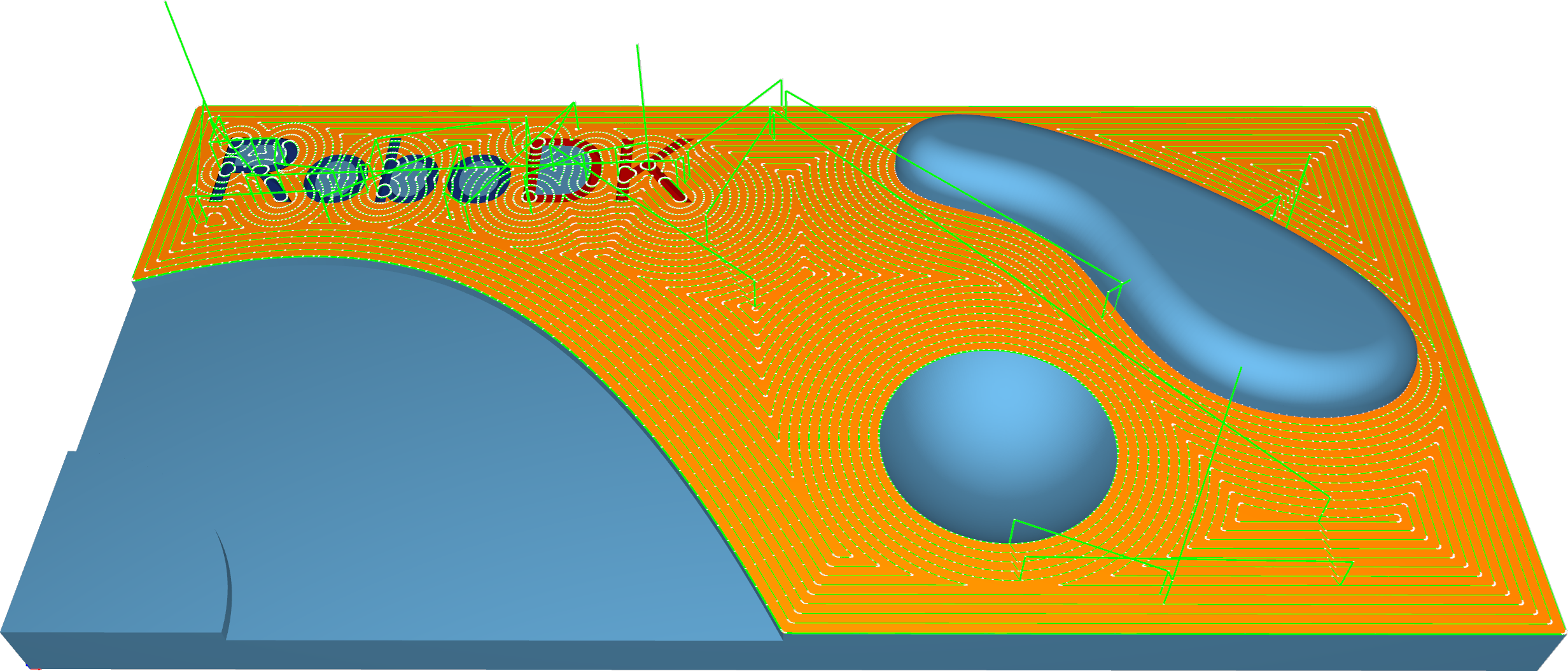
Trimesh–定常カスプ
この戦略は、加工面に等間隔の切断パターンを作成します。目的は、各輪郭間の距離を一定に保ち、形成される尖頭部が同じ高さになるようにすることです。
この戦略は、部品の半仕上げまたは仕上げ加工に一般的に使用されます。急峻な領域と浅い領域の両方の加工に最適です。
ステーション: CAM-Trimesh-ConstantCusp.
動画: https://youtu.be/iJG4jHLOO2w
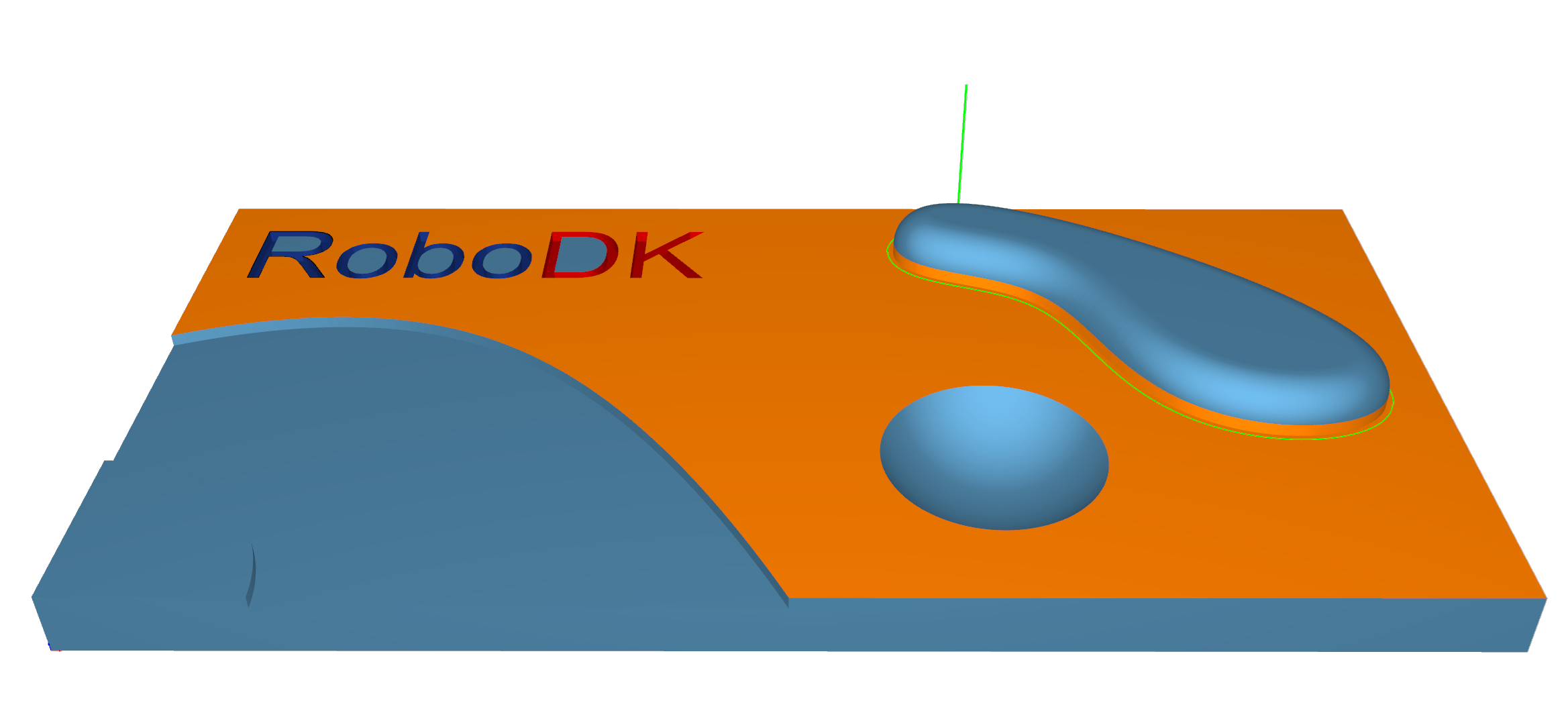
Trimesh–Flatlands
この加工戦略は、3D部品の真平坦領域を、平坦領域境界のオフセットセグメントで構成されるツールパスを用いて加工するために設計されています。一般的に部品の仕上げ加工に使用され、複数のZレベルにまたがる広大な平坦領域の加工に最適です。
分割面などの平面領域は、エンドミルやブルノーズミーリングカッターを用いて、フラットランド加工戦略で加工することが可能です。
注記:真の平面領域のみが検出されます。
注記:アルゴリズムが検出する平坦領域の最小幅は、「最小幅」パラメータで定義できます。
ステーション: CAM-Trimesh-Flatlands。
動画: https://youtu.be/-Aprvyz6NuE。
Trimesh–ペンシル
この戦略は、コーナーおよびフィレット処理を高速に行うことを目的としています。シングルペンシル切断またはマルチペンシル切断で実行できます。
ステーション: CAM-Trimesh-Pencil。
動画: https://youtu.be/I0NFFMUAmq4。
Trimesh–トロコイド
本戦略は、トロコイド運動による連続的な部品等高線加工を実現します。
ストックから部品を切断する加工に適用可能です。
ステーション: CAM-Trimesh-Trochoidal。
動画: https://youtu.be/xreJCrDxRRw
ワイヤーフレーム–5軸プロファイリング
この計算は、ワイヤーフレーム入力駆動曲線に基づくツールパス生成を提供します。加工面が一切不要で動作します。
工具の向きは傾斜線によって定義され、方向線に対して垂直となります。傾斜設定が必要であり、傾斜オプションで制御可能です。工具軸の方向は線間で補間されます。
ステーション: CAM-ワイヤーフレーム-5ax。
動画: https://youtu.be/xttctFJ-yZs
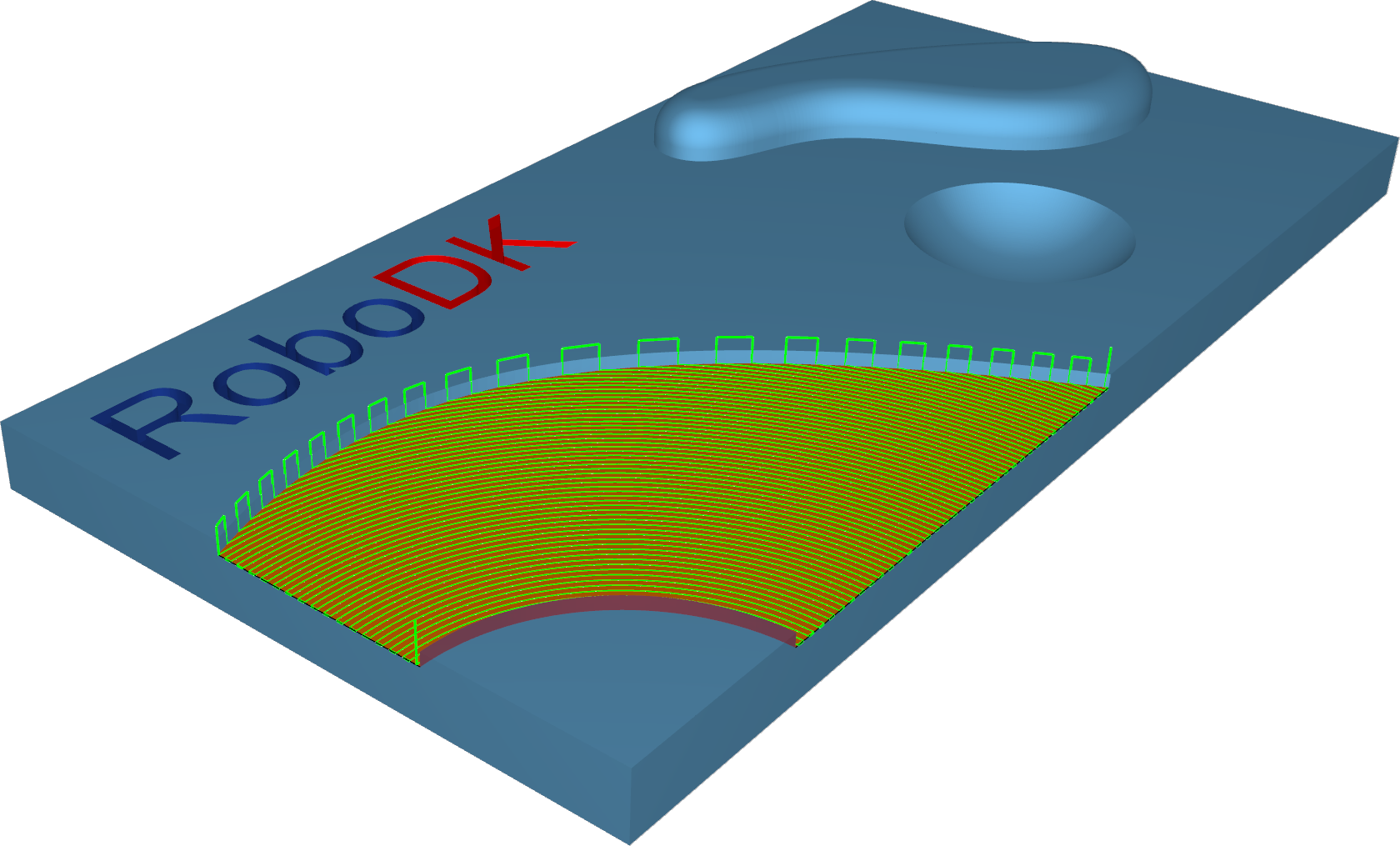
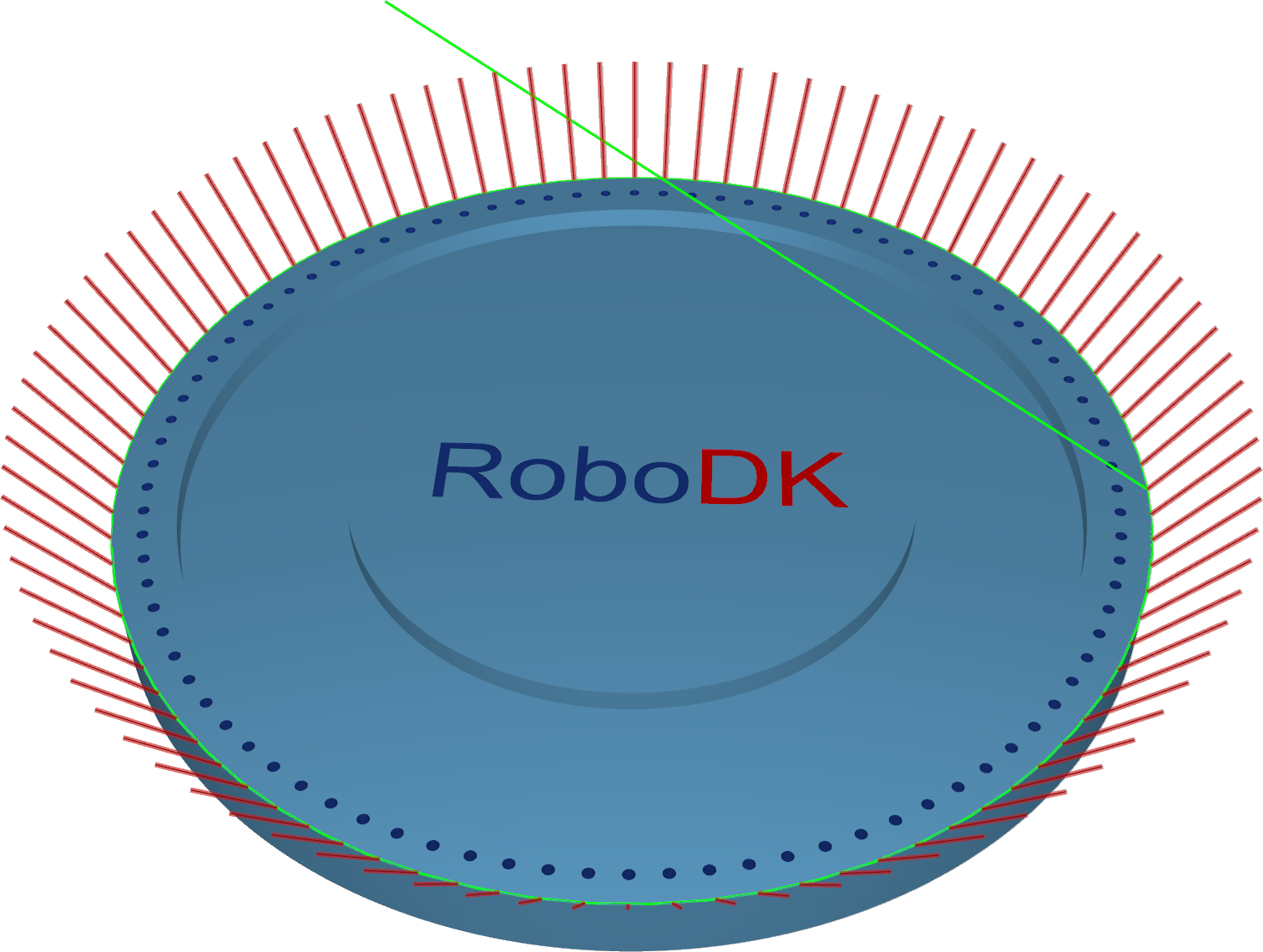
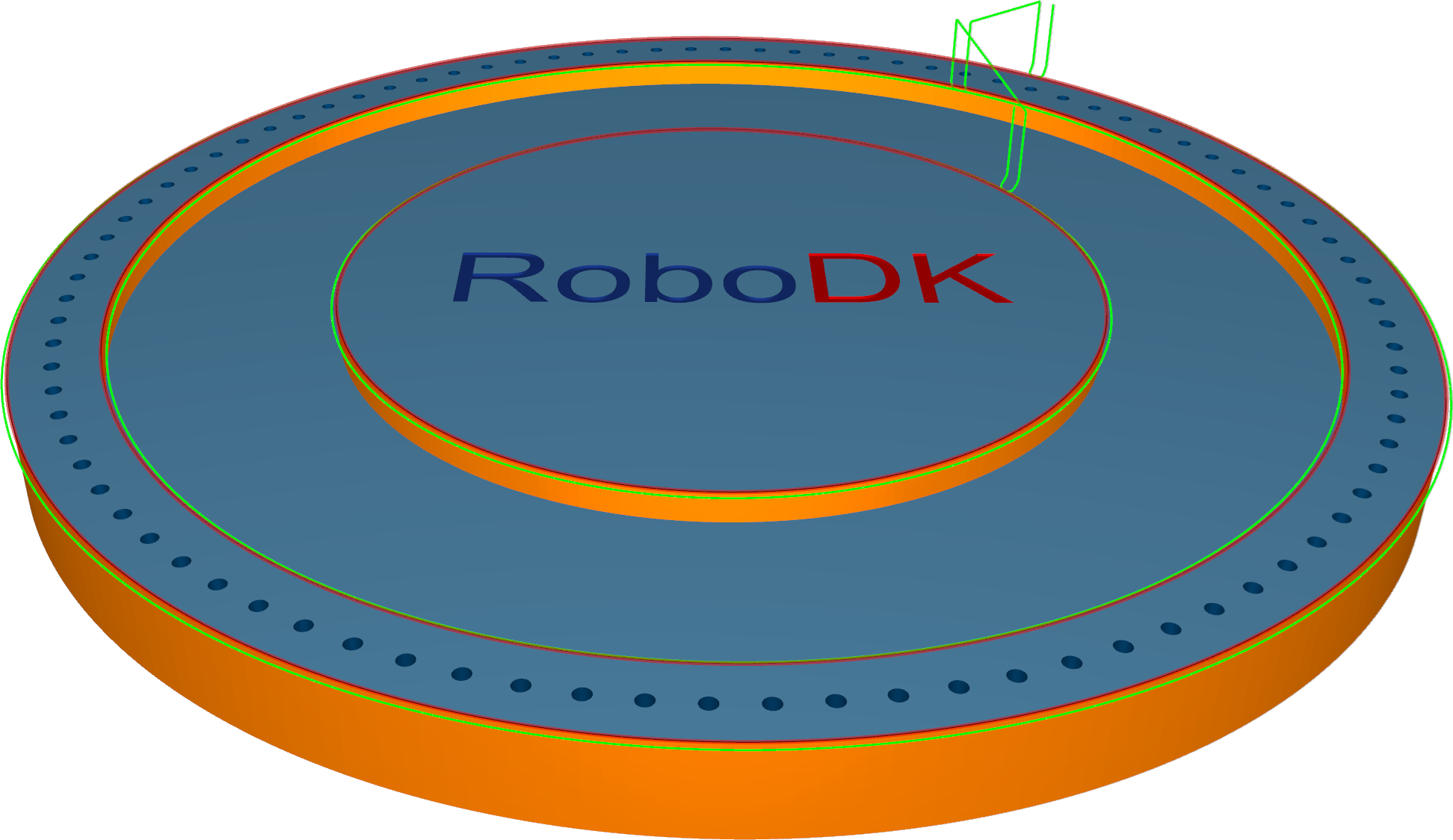
等高線加工
等高線加工は、エッジトリミングツールパスを生成する高度に自動化されたアルゴリズムです。
等高線加工の計算戦略は、薄板材料のエッジトリミング用に設計されています。形状に対する工具の位置は、3軸出力のみから、異なる工具軸方向オプションを備えたより複雑な5軸出力まで、様々なオプションで定義できます。このアルゴリズムの主な特徴は、工具を材料に一定の値だけ挿入できる軸方向シフトです。輪郭は自動化またはユーザー定義が可能です。
ステーション: CAM-等高線加工。
動画: https://youtu.be/NQjPj8pjeZY。
バリ取り
バリ取りアルゴリズムは、部品形状の外縁に沿ってバリ取りツールパスを生成します。デフォルトでは、球状工具のエッジに対する向きは、そのエッジの両表面間のバイベクトルとなります。特別な傾斜設定やその他の工具により、必要に応じて向きを調整します。
全てのエッジを検出するためには、入力ジオメトリ(メッシュ)の品質が良好である必要があります。
ステーション: CAM-バリ取り。
動画: https://youtu.be/vYCv3i2VfwY
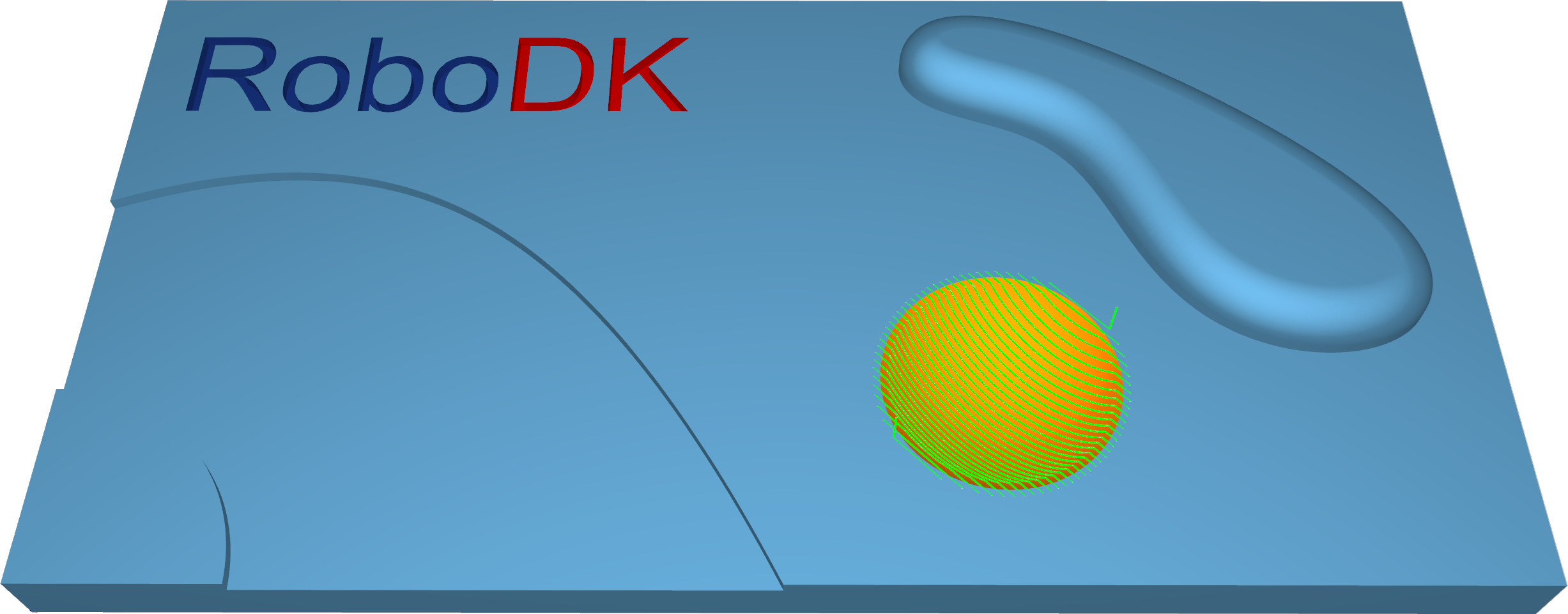
穴あけ
穴あけポイントに基づく計算は非常に基本的な穴あけサイクルです。加工面がなくても動作します。穴あけ位置と方向は、ポイントまたはラインで定義されます。
表面上 - 表面上の点/直線を使用する場合、ユーザーは表面上に直接位置する点/直線を選択する必要があります。工具軸の向きは表面法線によって決定されます。
ポイント - このサイクルでは、ユーザーは形状からポイントを選択する必要があります。穴あけサイクルは選択したポイントから開始されます。方向は「工具軸制御」タブで設定する必要があります。
直線 - このサイクルでは、ユーザーは形状から直線を選択する必要があります。直線は工具の位置と方向、およびドリル深さを定義します。
ステーション: CAM-穴あけポイント。
動画: https://youtu.be/vLpWxt7d6Zc。
短程線
短程線とは、「直線」という概念を「曲面空間」に写像した一般化です。これらの短程線距離を用いて、表面トポロジー上の距離を考慮したパターンを作成します。
短程線加工には2つのモードがございます:
1.接触点モードは全ての工具に対応しております。出力は表面ベースのパターンに類似しており、周囲の形状(例:内角部)との衝突を完全に回避するパターンを保証するものではありません。
2.ツールセンターモードはボール工具のみをサポートします。周囲の形状との衝突を避けるため、オフセット空間で計算が生成されます。
ステーション: CAM-短程線。
動画: https://youtu.be/EP7aC1CYeXY
多軸
多軸アルゴリズムは、ポケット形状の加工に使用できる多軸加工経路を生成します。計算にはSTLメッシュおよびIGES形状を入力として使用します。ユーザーは底面、側面、上面を指定する必要があり、システムが自動的に加工経路を作成します。
多軸荒加工アルゴリズムは、ポケット形状の幾何形状を荒加工するために使用できる多軸ツールパスを生成します。パラメータは三角形メッシュベースの荒加工サイクルと同一であり、適応型荒加工機能を含みます。
多軸床仕上げアルゴリズムは、ポケット形状の仕上げ加工に使用できる多軸ツールパスを生成します。ユーザーは部品と床面を指定する必要があります。
多軸壁仕上げアルゴリズムは、ポケット形状の仕上げ加工に使用できる多軸ツールパスを生成します。ユーザーは床面と壁面を指定する必要があります。
多軸残材仕上げアルゴリズムは、ポケット形状の残材仕上げ用多軸加工ツールパスを生成します。ユーザーは床面仕上げと壁面仕上げの操作を入力として提供する必要があります。計算には、ユーザーが提供するか、または以前の多軸加工操作から自動的に導出された、未加工領域周辺の囲み曲線が使用されます。
ユーザーは、以下のオプションのいずれかを選択することで、加工対象領域およびガイド曲線として使用する曲線を選択できます:
1.中軸:中軸を駆動曲線として使用します。中軸の主要部分は囲い込み曲線から計算されます。
2.床境界:床面の境界をガイド曲線として使用します。
3.加工しない:この領域は加工しません。
ステーション: CAM-多軸荒加工。
動画: https://youtu.be/RHyhQ7hJ4-0。
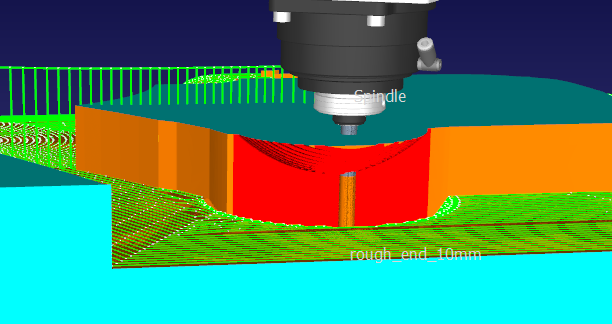
材料除去シミュレーション
材料除去シミュレーションは、材料除去プロセスを段階的に動的に可視化する機能です。工具が部品やストックを切断する詳細なシミュレーションを提供し、加工プロセスの各段階を観察することが可能です。
RoboDK CAMで材料除去を適切にシミュレートするには、以下の手順に従ってください:
1.カッターを定義する必要があります。
2.ステーション内に複数のロボットアームがある場合は、ロボットまたはCNCをリンクしてください。
3.ストックオブジェクトを指定してください。
4.切断シミュレーションを有効にしてください。有効にしない場合、シミュレーションは材料除去なしで実行されます。
ロボットをリンクしてください
「ロボットをリンク」ボタンの下矢印を使用して、利用可能なロボットのメニューを表示し、シミュレーションのいずれかのロボットにリンクしてください。ボタンが選択状態(ロボットがリンク済み)の場合、ボタンを押すとロボットがシミュレーションから切断されます。
ロボットとシミュレーションのリンクは、ステーションツリーのコンテキストメニューからも実行できます。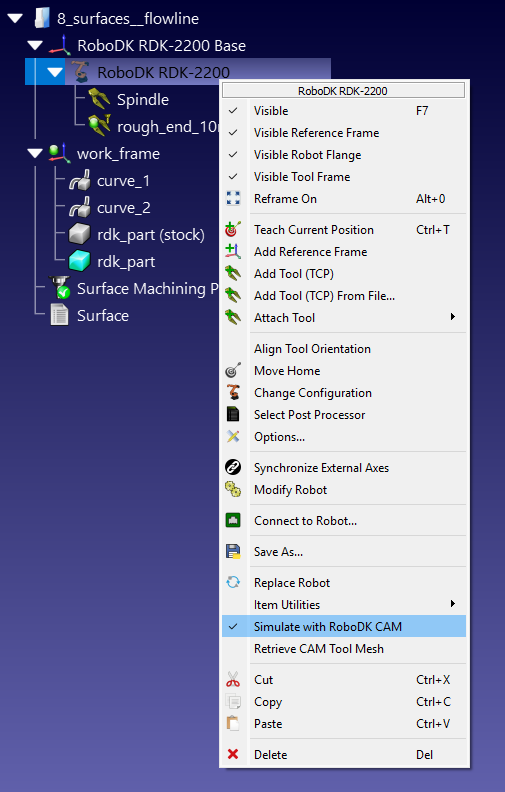
ロボットがシミュレーションにリンクされると、RoboDKウィンドウ内でのロボット動作は、シミュレーターによって工具動作として再現されます。この動作の発生源がRoboDKプログラム、Pythonスクリプト、またはマウスによる手動操作のいずれであっても同様です。
注記:ロボットリンクコマンドは、CAM-Link Robotメニューからもご利用いただけます。
ストックオブジェクトの定義
RoboDKステーションツリー内のストックオブジェクトを右クリックし、「CAM初期ストックメッシュの設定」を選択してください。
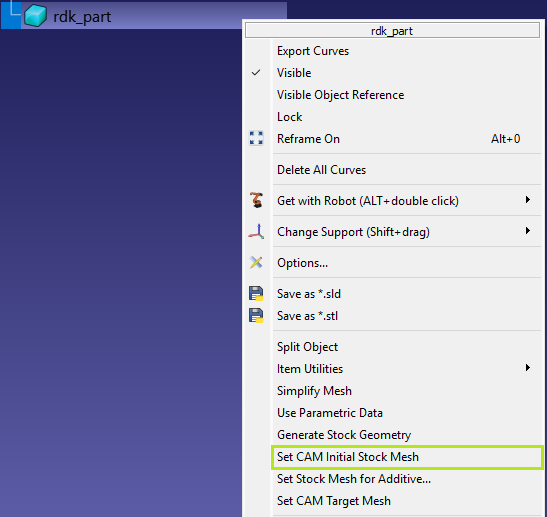
ご注意:ストックオブジェクトの指定処理には相当な時間を要する場合があり、中断できません。変換を開始する前に、プロジェクトが保存されていることを必ずご確認ください。
ストックオブジェクトの生成
RoboDKステーションツリー内のストックオブジェクトを右クリックし、「ストックジオメトリを生成」を選択してください。
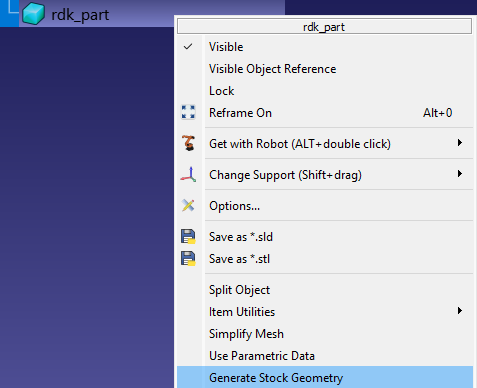
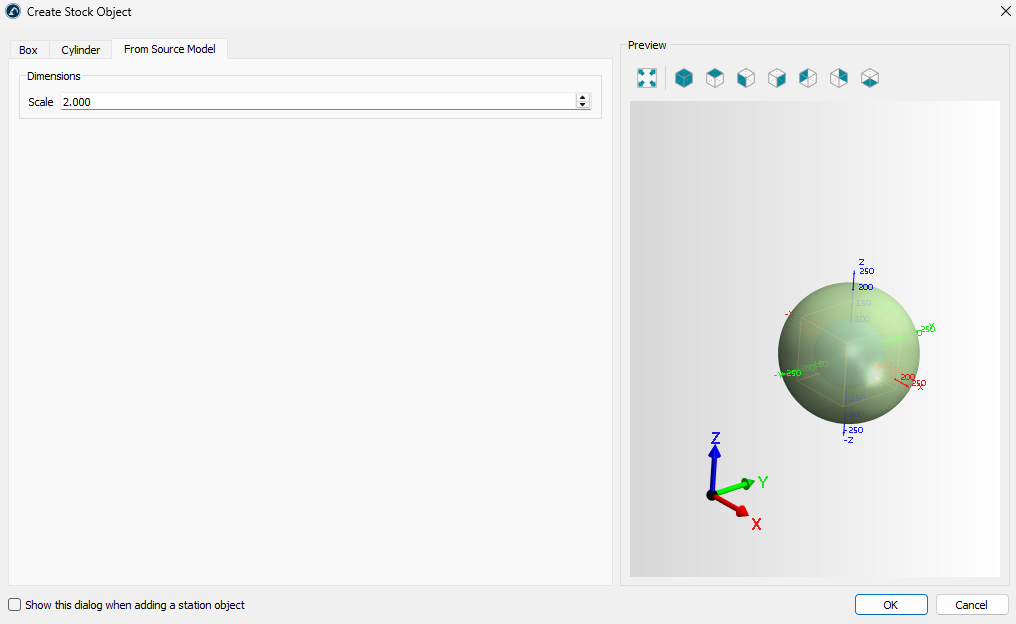
このコマンドにより、ストック作成ユーティリティが起動します。生成プロセスでは元のモデル形状が使用されます。
ストック生成には3つの方法がございます:
1.バウンディングボックス – [ボックス]タブ
2.バウンディングシリンダー – シリンダータブ
3.スケーリング – [ソースモデルから]タブ
ボックスタブでは、バウンディングボックスの正確な寸法を指定するか、特定の寸法を抽出して拡大することで生成できます(「元の寸法」ボタンを使用)。

円柱タブでは、元のモデルを内包する円柱形状のストックを作成できます。
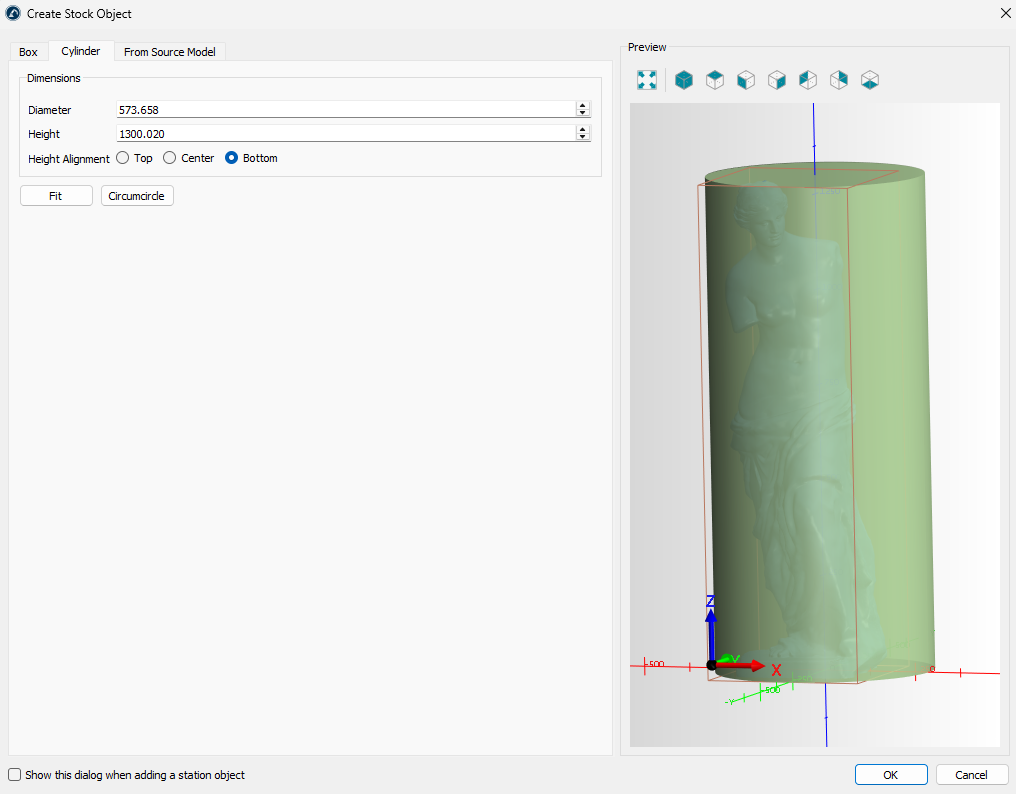
「ソースモデルから」タブでは、元のモデルをスケーリングした形状のストックを作成できます。
ストックビュー
ストック定義が完了すると、シミュレーション用ストックモデルがRoboDKシーン内の他のモデルの上に表示されます。ツールバーの「ストックビュー」サブメニューを使用して、ストックシミュレーションの表示を制御できます:
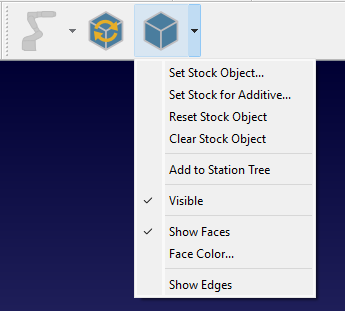
ストックオブジェクトの設定 – ストックオブジェクトを定義/再定義します。
積層オブジェクト用ストックの設定 – 積層ストックオブジェクトを定義/再定義します。
ストックオブジェクトのリセット – ストックを初期状態に戻します。
ストックオブジェクトのクリア – ストックオブジェクトを削除します。
ステーションツリーに追加 – 現在の状態のストックをモデルとしてRoboDKステーションツリーにコピーします。
表示 – ストックの表示/非表示を切り替えます。
面を表示 – ストックの面を表示します。
面の色… – 面のデフォルトの色を設定します。
エッジを表示 – ストックのエッジを表示します。
注記:すべてのストック関連コマンドは、CAM-ストックビューメニューからもご利用いただけます。
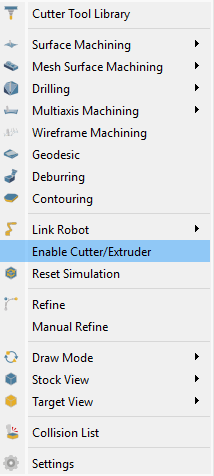
材料除去シミュレーションを有効化
材料除去シミュレーションは自動的に有効になります。ただし、CAM-カッター/押出機有効化コマンドを使用して手動で制御することも可能です。
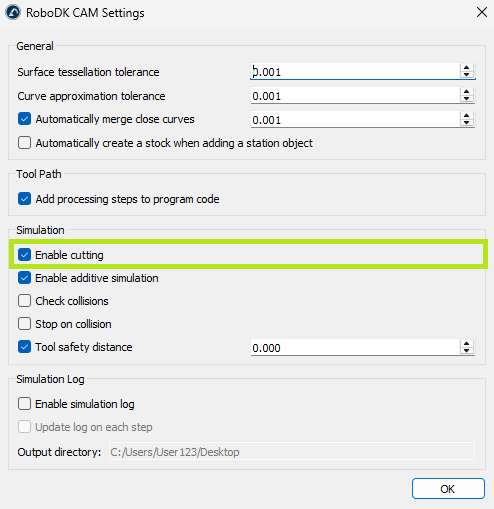
また、CAM-設定-シミュレーション-切断を有効にする設定が有効になっているか確認する必要があります。
シミュレーションのリセット
シミュレーションリセットコマンドは、ストックを初期状態に戻します。

注記:シミュレーションリセットコマンドは、CAM-シミュレーションリセットを使用しても実行可能です。
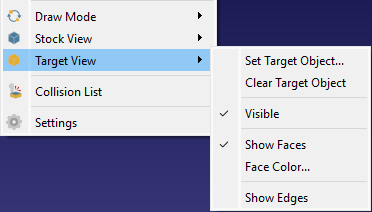
ターゲットビュー
現在のストックの状態をターゲットモデルと比較することができます。これを行うには、まずCAM-ターゲットビュー-ターゲットオブジェクトの設定を使用してターゲットモデルを設定し、次にCAM-描画モード-偏差マップを適用する必要があります。
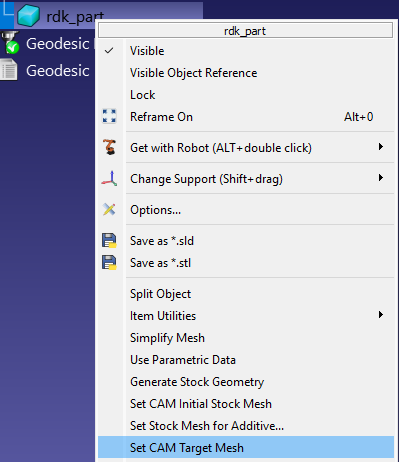
ターゲットオブジェクトの設定には、ステーションツリー内のモデルを右クリックし、「CAMターゲットメッシュの設定」コマンドを選択する方法もご利用いただけます。
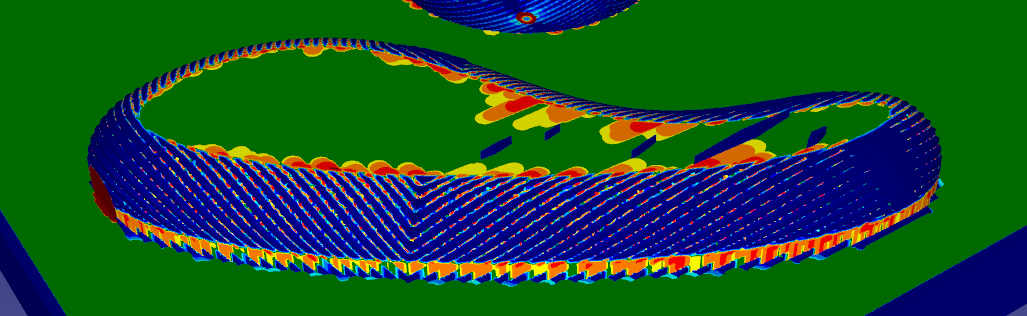
偏差マップ
偏差マップは、色のスケールを用いて相対的な差異を表示します。緑色は差異なし、赤色は最大の差異を示します。
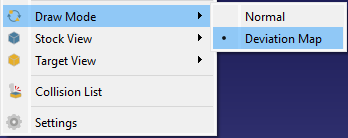
偏差マップを表示するには、CAM-描画モード-偏差マップを選択してください。
衝突リスト
衝突リストは、加工中にカッター工具の非切断部分(ホルダーなど)とワークピースとの間で発生した衝突の順序を表示します。
CAM-衝突リストを選択すると、衝突リストが表示されます。
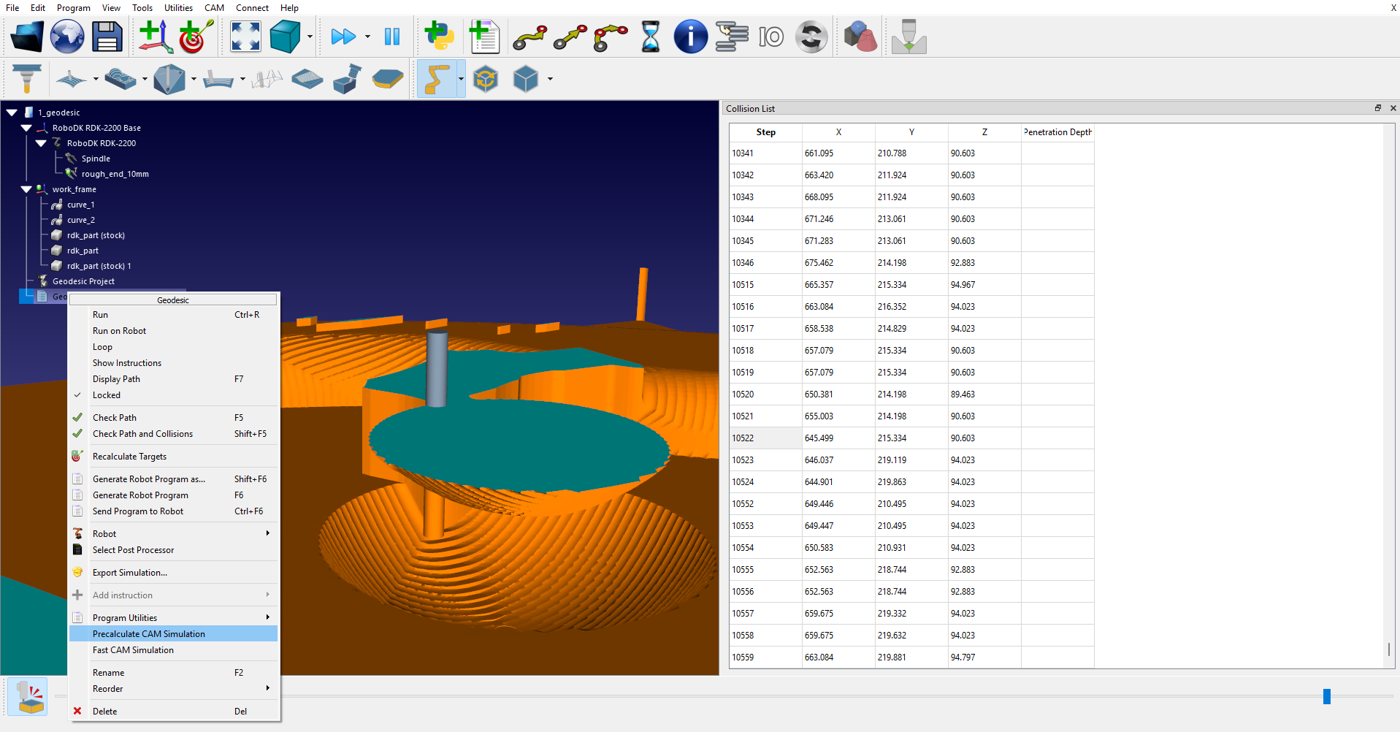
注:衝突チェックリストユーティリティに必要なデータを提供するには、まず生成されたプログラムを右クリックし、「CAM シミュレーションの事前計算」コマンドを選択してください。
リファイン/手動リファイン
「リファイン」オプションを有効にすると、シミュレーション中の表面の視覚化品質を向上させることができます(レンダリング性能に影響を与える可能性があります)。
手動リファインコマンドを使用すると、一度押すことでサーフェスの可視化を改善できます。
CAM-リファイン / CAM-手動リファインを選択すると、リファイン操作を実行できます。
高速CAMシミュレーション
材料除去の簡易シミュレーションを実行できます。これを行うには、ターゲットプログラムを右クリックし、「高速CAMシミュレーション」コマンドを選択してください。
設定
CAM設定をクリックすると、RoboDK CAMのデフォルト設定を調整できます。
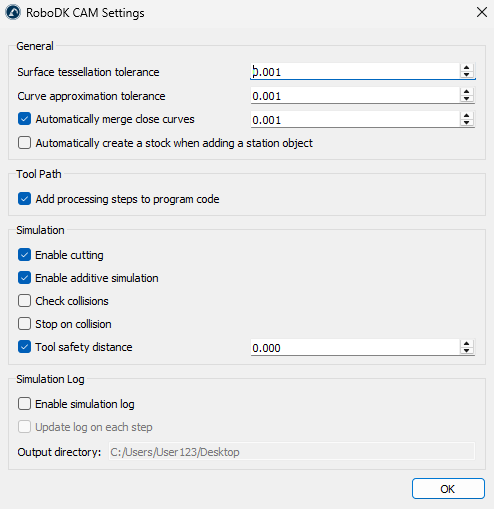
一般設定
一般設定グループには、モデルインポートの許容誤差設定が含まれます。さらに、「自動ストック作成」オプションを有効にすると、ステーションにモデルを追加するたびに、対応するダイアログボックスが表示されます。
工具パス
ツールパス設定グループには、「プログラムコードに加工ステップを追加」オプションが含まれます。このオプションを有効にすると、生成されたプログラムに加工プロセスに関連する追加情報が追加されます。
シミュレーション
シミュレーション設定グループには、材料除去/追加シミュレーションおよび衝突チェックを有効にするパラメータが含まれます。「工具安全距離」パラメータを使用すると、カッター工具の非切断部分と材料との間に追加の距離を指定できます。この距離は衝突チェックの際に考慮されます。
衝突面は赤色で表示されます。
ログ
シミュレーションログ設定グループには、シミュレーション関連の問題調査に役立つログパラメータが含まれています。