衝突マップ
オブジェクトのペア間の相互作用の衝突をチェックする必要があるかどうかを指定できます。
ツールを選択➔
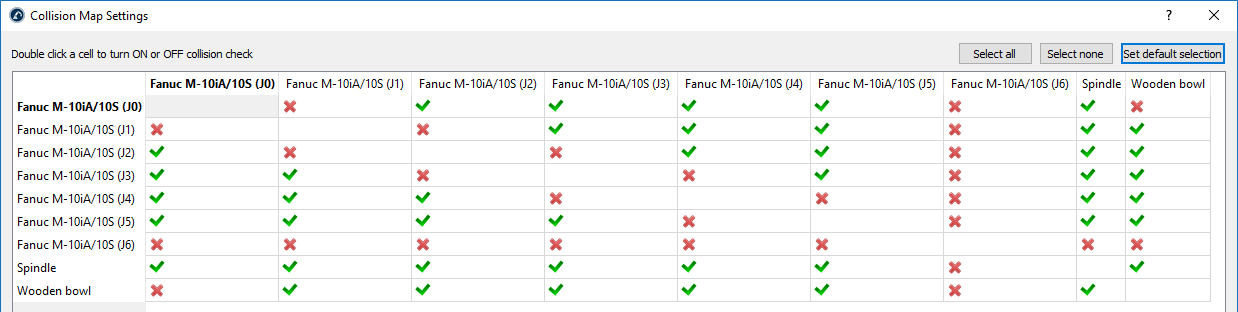
デフォルトでは、RoboDKは、すべてのロボットリンク、オブジェクト、ツールを含む、ステーション内のすべての移動オブジェクト間の衝突をチェックします。例外として、連続したロボットのジョイントは常に接触している可能性があるため、衝突のチェックは行われません。
ヒント: 対角線上のケースをダブルクリックして、他のすべてのオブジェクトに対する特定のオブジェクトの衝突をチェック/チェック解除します。
ヒント:衝突チェックが原因でシミュレーションの速度が低下する場合は、チェックの数を減らして、衝突チェックに使用するコンピューターの電力を少なくすることをお勧めします。