ツール➔ 衝突をチェックを選択して、衝突検出をオンまたはオフにします。衝突検出が有効な場合、衝突が検出されると、すべてのプログラムとロボットの動きが停止します。シミュレーションが衝突状態に入ると、衝突したすべてのオブジェクト、ツール、ロボットリンクが赤で強調されます。
衝突をチェックを選択して、衝突検出をオンまたはオフにします。衝突検出が有効な場合、衝突が検出されると、すべてのプログラムとロボットの動きが停止します。シミュレーションが衝突状態に入ると、衝突したすべてのオブジェクト、ツール、ロボットリンクが赤で強調されます。
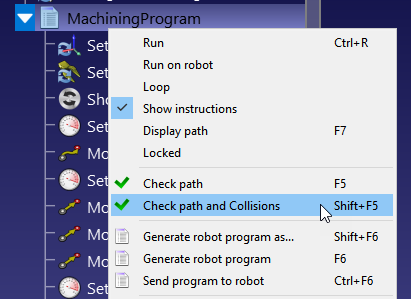
次の手順に従って、プログラムの衝突を安全にチェックしましょう:
1.プログラムを右クリック。
2.パスと衝突をチェック(Shift+F5)を選択。この設定は、パスが実行可能かどうかをすばやく確認し(パスをチェック - F5と同じ様に)、衝突がないことを確認します。
重要: ツール➔設定➔モーションで定義された衝突チェックステップは、安全にチェックするステップを定義します。
ヒント:RoboDKでロボットセルを正確にモデリングすることをお勧めします。衝突を安全に予測するには、モデルの立体を実際よりも大きくすることを推奨します。
メモ: 衝突が検出された場合でもプログラムのシミュレーションを続行したい場合は、
ツール➔設定➔ モーションメニューで
衝突が検出された場合、ロボットの動作を停止設定のチェックを外してください。
オブジェクトのペア間の相互作用の衝突をチェックする必要があるかどうかを指定できます。
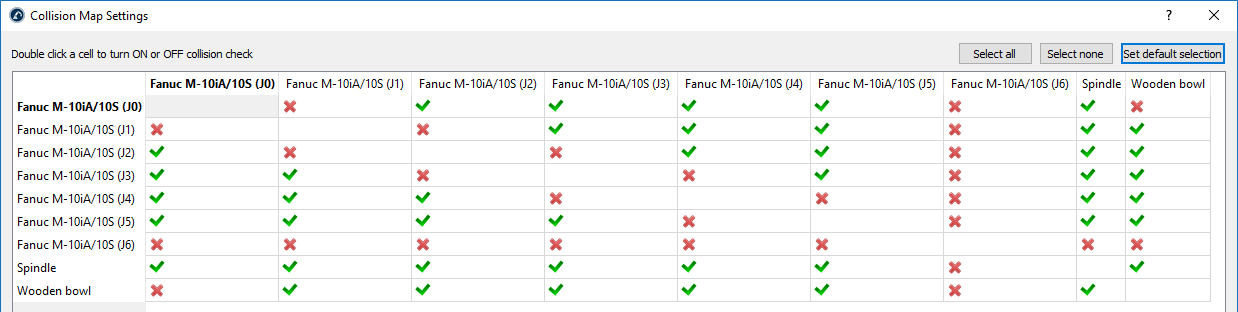
ツールを選択➔ 衝突マップセル内のすべての移動オブジェクトと衝突チェック状態の関係を表示します。セルをダブルクリックして、その関係の衝突チェックをアクティブまたは非アクティブにします。[デフォルトの選択を設定]を選択して、保守的な選択を自動的に設定します。
衝突マップセル内のすべての移動オブジェクトと衝突チェック状態の関係を表示します。セルをダブルクリックして、その関係の衝突チェックをアクティブまたは非アクティブにします。[デフォルトの選択を設定]を選択して、保守的な選択を自動的に設定します。
デフォルトでは、RoboDKは、すべてのロボットリンク、オブジェクト、ツールを含む、ステーション内のすべての移動オブジェクト間の衝突をチェックします。例外として、連続したロボットのジョイントは常に接触している可能性があるため、衝突のチェックは行われません。
ヒント: 対角線上のケースをダブルクリックして、他のすべてのオブジェクトに対する特定のオブジェクトの衝突をチェック/チェック解除します。
ヒント:衝突チェックが原因でシミュレーションの速度が低下する場合は、チェックの数を減らして、衝突チェックに使用するコンピューターの電力を少なくすることをお勧めします。
衝突検出速度は多くの要因に大きく依存します。
1.で定義されているチェックのペアの数衝突マップ。チェックの少ない衝突マップを使用すると、より高速になります。
2.干渉チェックに使用されるロボットステップ。衝突ステップはツールで変更できます➔オプション➔モーションメニュー。直線運動はミリメートル単位のステップを使用し、関節運動は度単位のステップを使用します。ステップを大きくすると、衝突チェックが速くなりますが、結果の精度が低下する可能性があります。
3.コンピューター能力:コンピューター能力(CPUの高速化)と処理スレッドの増加により、衝突チェックを高速化できます。
4.3Dファイルの複雑さ。丸みを帯びた領域など、詳細度の高いジオメトリは、通常、より多くの計算能力を必要とします。これらの形状を単純化し、三角形の数を減らすと、衝突チェックの速度が上がります。
ヒント: STEP / IGESオブジェクトのインポート設定を変更して、(
ツール-オプション-CADメニュー)。これにより、RoboDKプロジェクトに軽量のオブジェクトが作成されます。軽いオブジェクトのステーションは、シミュレーションと衝突チェックのスピードアップに役立ちます。より小さなRDKファイルも取得できます。