カメラ設定
カメラ設定では、カメラのパラメータをカスタマイズして、RoboDKのシミュレーション環境でカメラをリアルに表示させることができます。
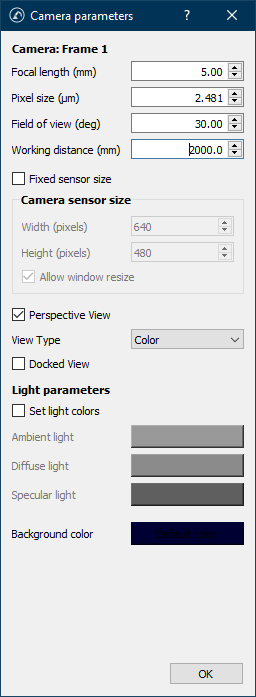
カメラの設定を編集するには、ツリー上でカメラを右クリックし、カメラ設定を選択します。RoboDKでは、新しく追加されたカメラのデフォルト設定は以下のようになっています:
●カメラアンカー名を提供(フレーム1)
●Focal length (mm):焦点距離、単位はミリメートル(5.00)。レンズの仮想光学中心と仮想カメラのイメージセンサー間の距離です。この値を変更すると、ピクセルサイズに影響します。
●Pixel size (μm): ピクセルサイズ、単位はμm (2.481)。この値を変更すると、視野に影響します。
●Field of view (deg): 視野 (FOV)、単位は度 (30.0)。カメラで認識できる領域の大きさに影響します。この値を変更すると、ピクセルサイズに影響します。
●ワーキングディスタンス(mm):作動距離、単位はミリメートル(2000.0)。これはカメラが周囲を認識できる距離で、この距離を超えた物体は画像の一部にはなりません。
●固定センサーサイズ:チェックを外すと、カメラのセンサーサイズ(または解像度)はカメラのプレビューウィンドウのサイズで設定されます。
●カメラのセンサーサイズ:固定センサーサイズの場合、カメラの幅と高さをピクセル単位で指定します。プレビューウィンドウのサイズを変更しても、サイズには影響しません。
●ウィンドウのサイズ変更を許可します:センサーサイズに影響を与えることなく、ユーザーがプレビューウィンドウのサイズを変更できるようにします。例えば、解像度を4Kに保ったまま、ウィンドウを720pにリサイズできます。
●パースビュー:チェックを外すと、カメラが正投影カメラになり、パースペクティブがなくなります。
●表示タイプ:カラー、グレースケール、深度など、カメラの表示タイプを決定します。ビューの種類によって、関連するデータに応じて出力画像が変わります。
●ドッキングビュー:プレビューウィンドウをツールバーにドラッグできるようにします。
●光の色を設定します:デフォルトのライトカラーを独自のカラー(環境光、拡散光、鏡面光)で上書きします。背景色には影響せず、Colorビュータイプでのみ使用できます。
●背景色:無限遠の未知の色。カメラセンサーからワーキングディスタンスまで物体がない場合に使用される色です。