ハンドアイキャリブレーション
ハンドアイキャリブレーションは、ロボットのフランジまたはツールに対するカメラの位置を較正するプロセスです。
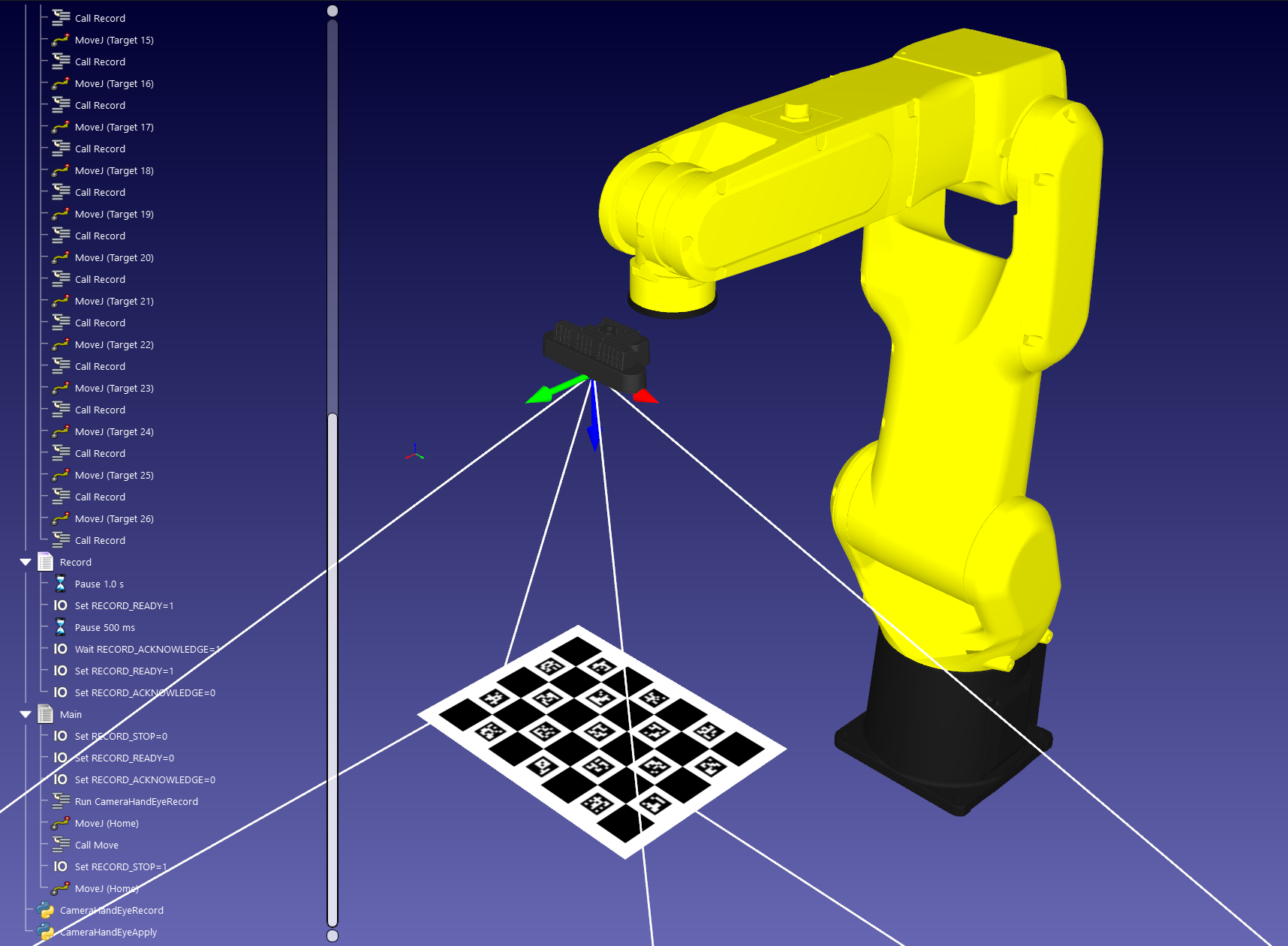
RoboDK では、手によるキャリブレーションのプロセスをシミュレートすることができます。同じ手順で、ロボットのフランジやツールに対して実際のカメラを較正することができます。
Python 用 RoboDK API のサンプルセクションhttps://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration に完全なサンプルがあります。