金型ロボット
プロジェクトを開始するには、まずデフォルトライブラリからRoboDKの3軸金型加工例を選択します。
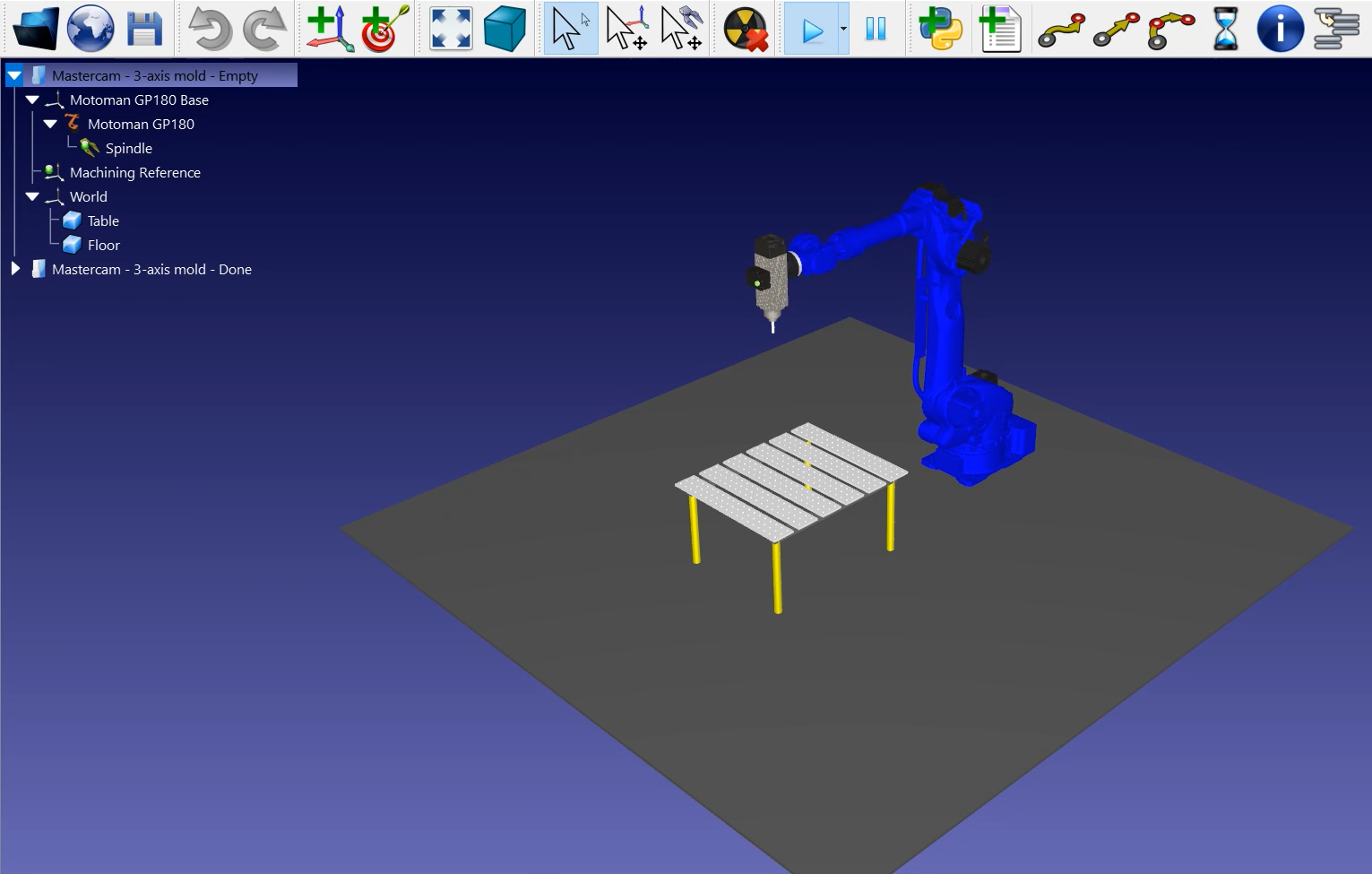
RoboDKの設定
この例では、Motoman GP180ロボット、スピンドルに取り付けられた切削ツール、部品を固定するテーブルを使用しています。
ヒント この、RoboDKでロボットステーションを作成する方法を順を追って学んでください。
ステーションをロードします:
1.File ➔
2.RoboDKのExamplesセクションから3軸金型加工のサンプルを探します:
C:/RoboDK/Examples/ Plugin-Mastercam-3-Axis-Mold-Machining.rdk.
ステーションのロードが完了したら、Mastercamを開き、C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcamからプロジェクトをロードします。
Mastercamでの加工ツールパス
Mastercamで3Dオブジェクトを開き、切削シミュレーションを起動します。この例では、3Dオブジェクトは、Mastercamツールを使用してすでにカッティングパスが作成された金型金属片
この例を単純化するために、その部品を加工するのに必要なパスの数を大幅に減らしています。実際には、金型にはもっと多くの線や切削経路があるはずで、工具の動きを実際に見ることはできないでしょう。
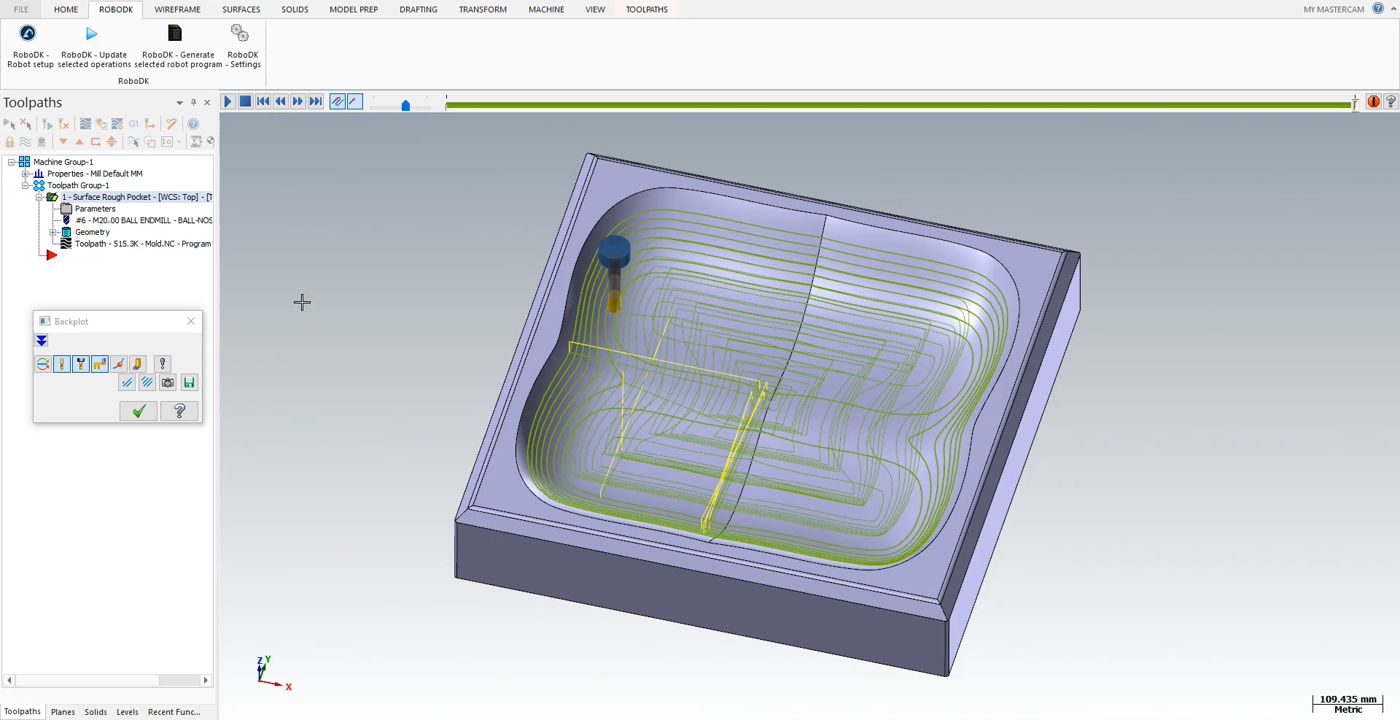
Mastercamの切削シミュレーションは、プログラム中に工具が必要とする全ての動きを表示します。
次の手順に従って、パーツをRoboDKにロードしてください:
1.RoboDKタブを選択し、RoboDK - Robot setupを選択します。
2.Load Partを選択します。
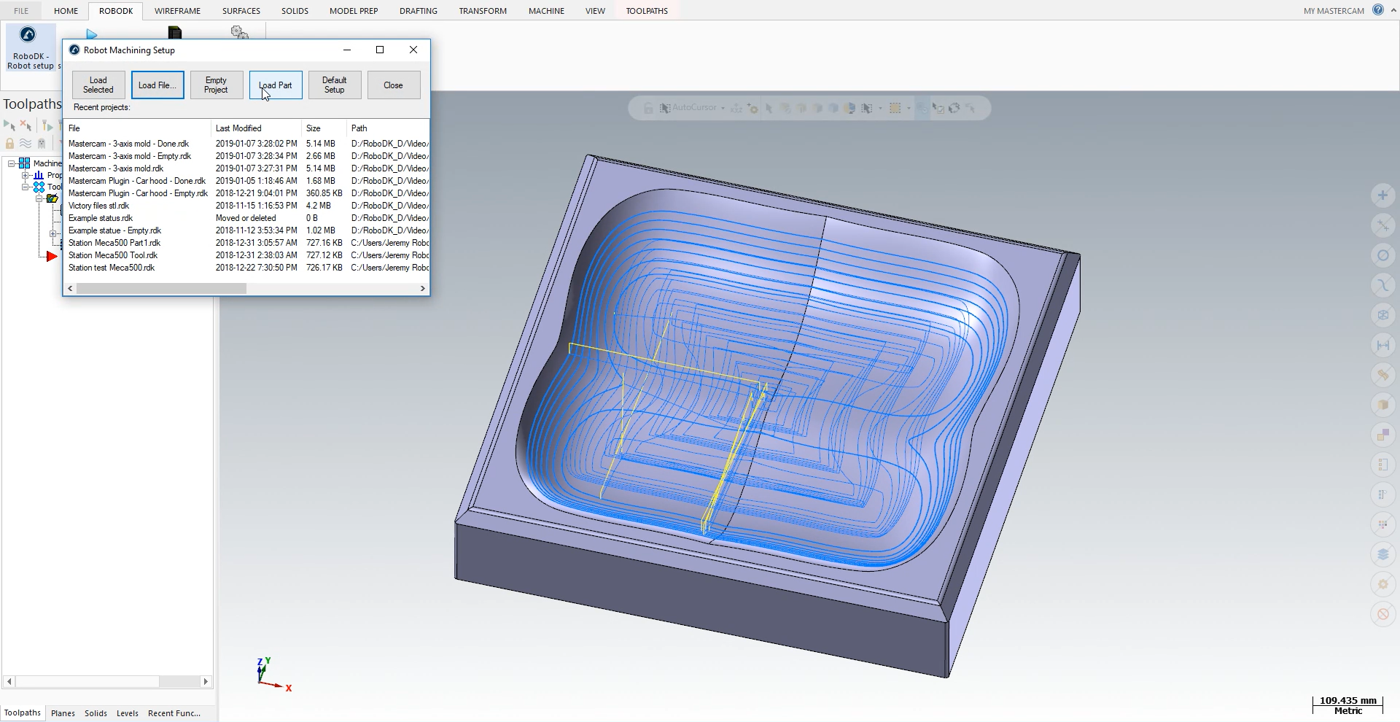
RoboDKステーションのテーブル上のアクティブなリファレンスフレーム(加工リファレンス)にパーツがロードされているのが見えるはずです。
次のステップは、MastercamからRoboDKにカッティングパスをインポートすることです。
1.MastercamのRoboDKタブを選択します。
2.RoboDKを選択- 選択した操作を更新します。
3.RoboDKへ。
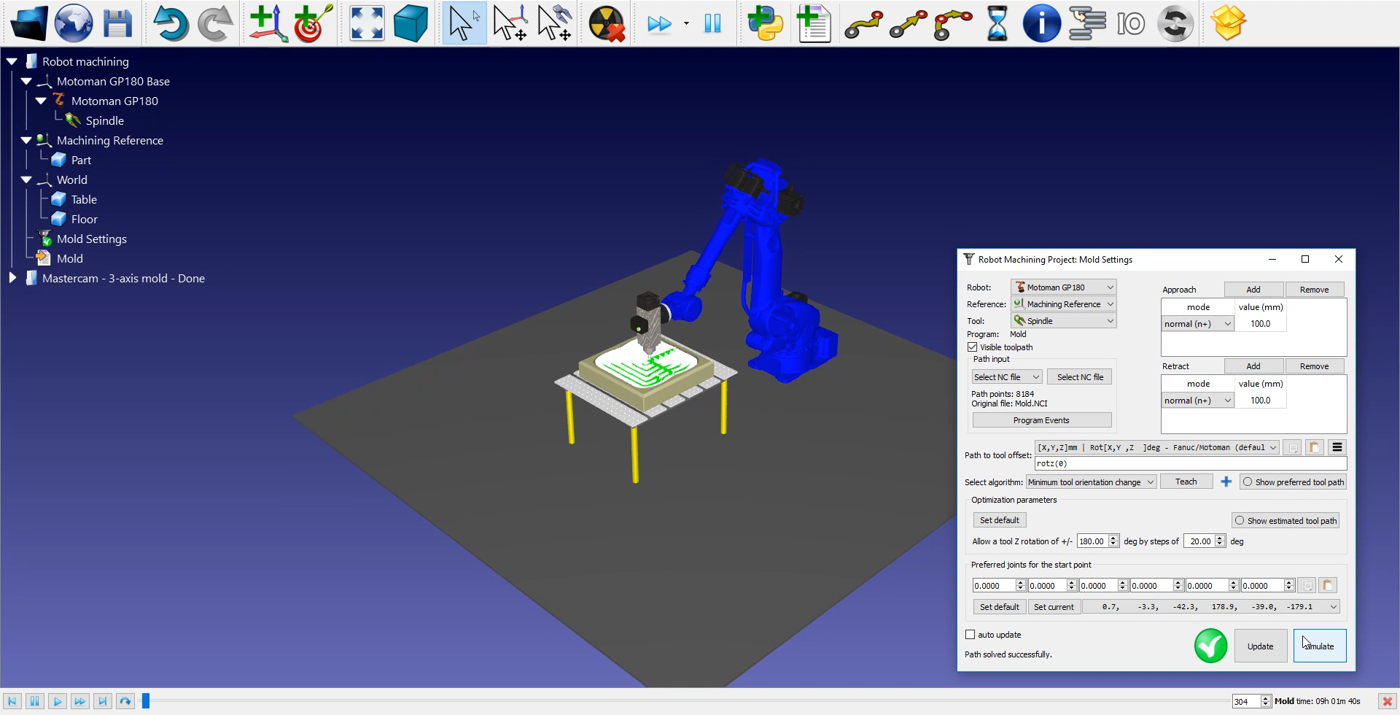
RoboDK におけるロボット加工
ロボットの加工パスがRoboDKにインポートされると、ロボットの加工ツールパスがRoboDKステーションの金型リファレンスにアタッチされているはずです。
また、カッティングパスの前後でアプローチとリトラクトの動作の値を調整することもできます。この例では100mmで問題ないでしょう。衝突の危険性がある場合は、ロボットの動作範囲内でいくらでも増やすことができます。
次のステップでは、
注意:RoboDKでは、スペースバーを押し続けるか、メニューの
注意:パスに沿ってツールの向きを調整することができます。この例では、ツールのZ軸を中心に回転させることしかできませんが、標準の向きをお勧めします。
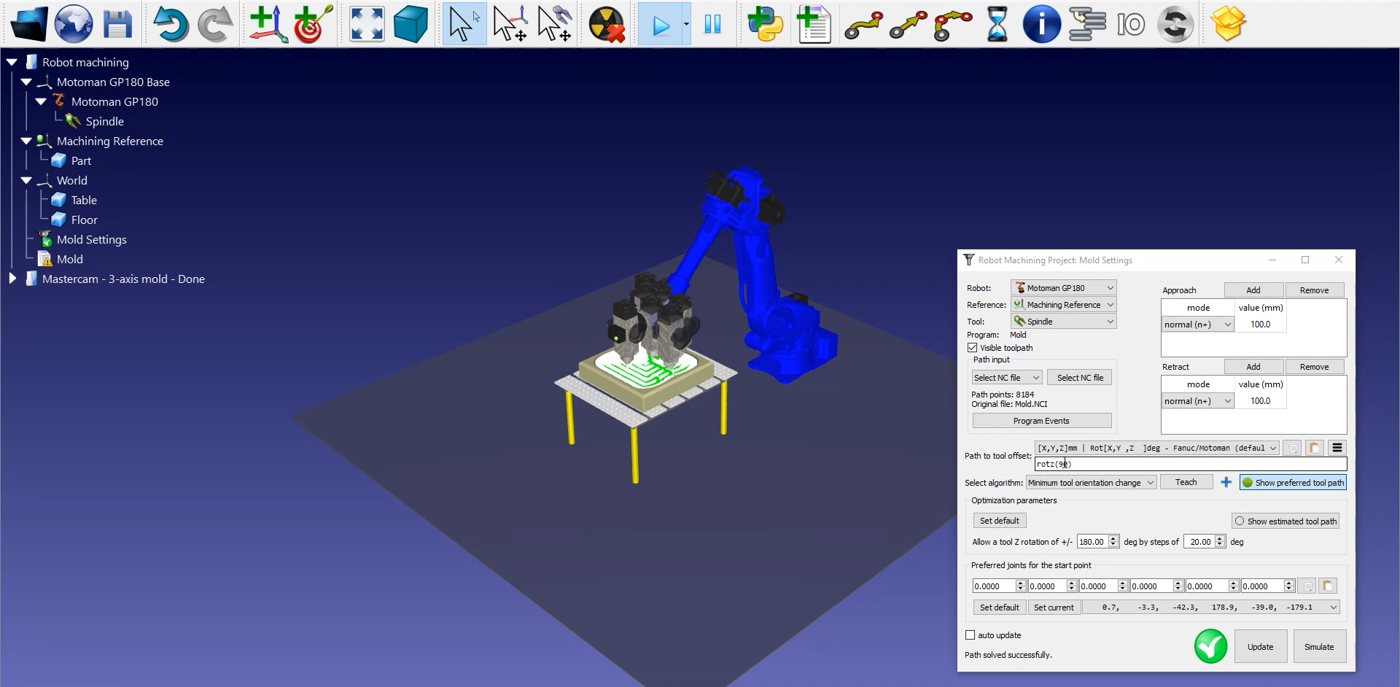
以下の手順に従って、ツールの向きを調整してください:
1.
2.Show preferred tool pathを選択します。下の画像のように、いくつかのゴーストツールが表示されます。これらはパスに沿ったツールの位置を表しています。
3.ホイールを90度まで上にスクロールしてrotz (0)の値を変更します。rotzの値が変化し、それに伴ってゴーストトールの位置が変化するのがわかります。
4.Update➔ Simulate を選択します。
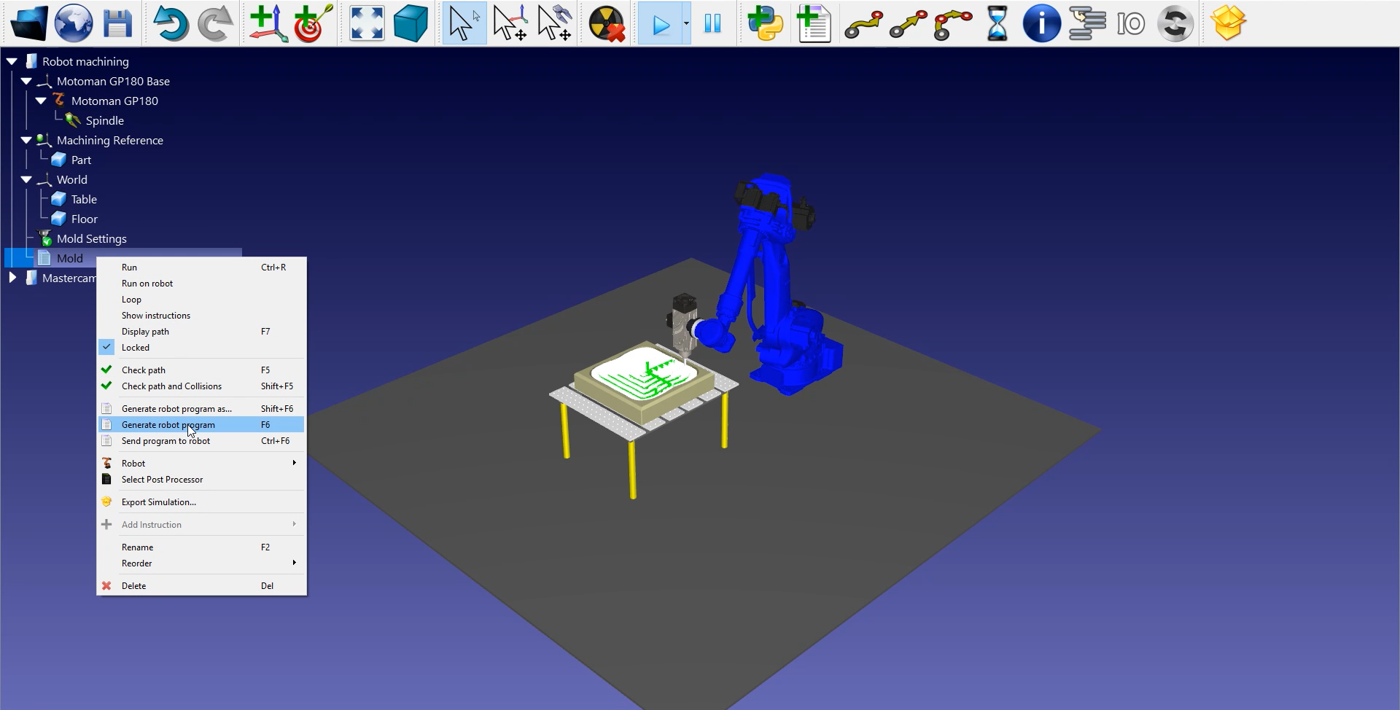
ロボットプログラムを生成するには、正しいポストプロセッサを使用してください。
最後に、
これでMotoman JBIファイルをロボットコントローラに転送する準備ができました。