Mold Machining
イントロダクション
この例題は、Mastercam プラグインを使用して RoboDK で簡単な 3 軸加工プロジェクトを作成するのに役立ちます。この例では、切削工具を持ったMotomanロボットをシミュレーションし、ロボットを3軸加工機として使用して簡単な金型を加工するようにプログラムします。CNCプログラムをロボットシミュレーションとロボットプログラムに変換する方法を学びます。
ビデオ3軸金型加工アプリケーション用Mastercamによるロボットプログラミング
Mastercam用RoboDKプラグインを使用すると、MastercamからRoboDKへ直接ロボット加工プロジェクトを素早くセットアップできます。このプラグインにより、Mastercamから直接50以上の異なるロボットメーカー、500以上のロボットをプログラムすることができます。
Mastercam用RoboDKプラグインはNCI(Mastercamのネイティブ前処理ファイル)と標準APT CLSおよびGコードファイルをサポートしています。このプラグインはRoboDKのライセンスをお持ちであれば無料でご利用いただけます。
ヒントMastercam用RoboDKアドインについては、Mastercam用RoboDKアドインのセクションをご覧ください。
金型ロボット3軸加工
プロジェクトを開始するには、まずデフォルトライブラリからRoboDKの3軸金型加工例を選択します。
RoboDKの設定
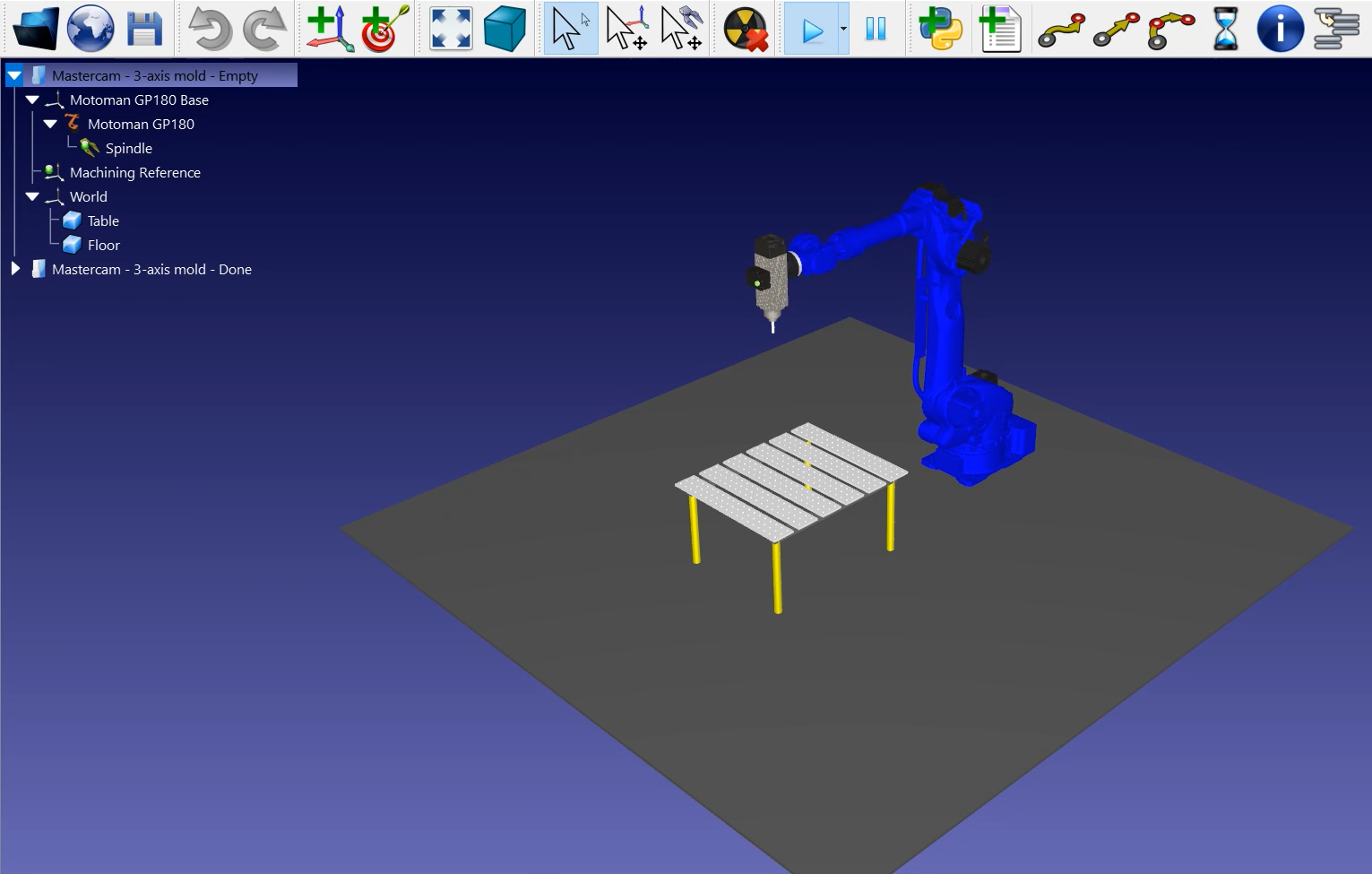
この例では、Motoman GP180ロボット、スピンドルに取り付けられた切削ツール、部品を固定するテーブルを使用しています。
ヒント この、RoboDKでロボットステーションを作成する方法を順を追って学んでください。
ステーションをロードします:
1.File ➔
2.RoboDKのExamplesセクションから3軸金型加工のサンプルを探します:
C:/RoboDK/Examples/ Plugin-Mastercam-3-Axis-Mold-Machining.rdk.
ステーションのロードが完了したら、Mastercamを開き、C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcamからプロジェクトをロードします。
Mastercamでの加工ツールパス
Mastercamで3Dオブジェクトを開き、切削シミュレーションを起動します。この例では、3Dオブジェクトは、Mastercamツールを使用してすでにカッティングパスが作成された金型金属片
この例を単純化するために、その部品を加工するのに必要なパスの数を大幅に減らしています。実際には、金型にはもっと多くの線や切削経路があるはずで、工具の動きを実際に見ることはできないでしょう。
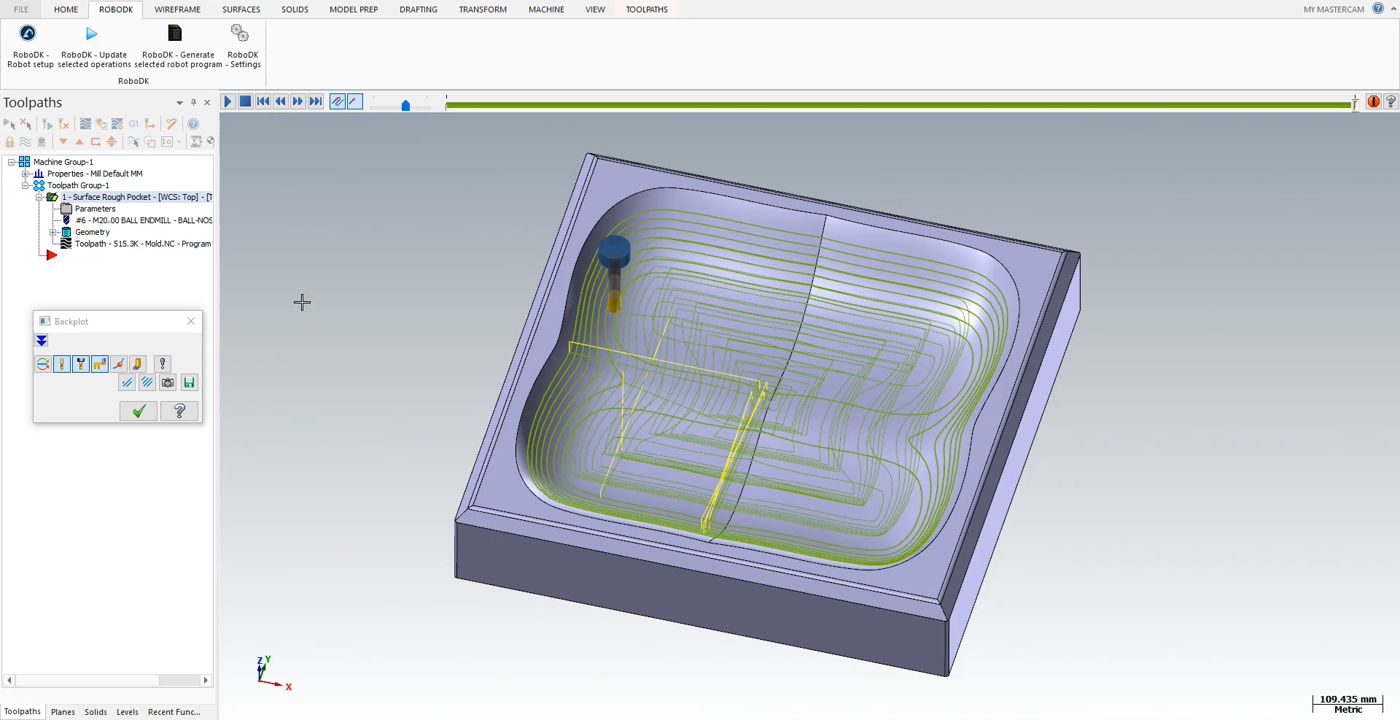
Mastercamの切削シミュレーションは、プログラム中に工具が必要とする全ての動きを表示します。
次の手順に従って、パーツをRoboDKにロードしてください:
1.RoboDKタブを選択し、RoboDK - Robot setupを選択します。
2.Load Partを選択します。
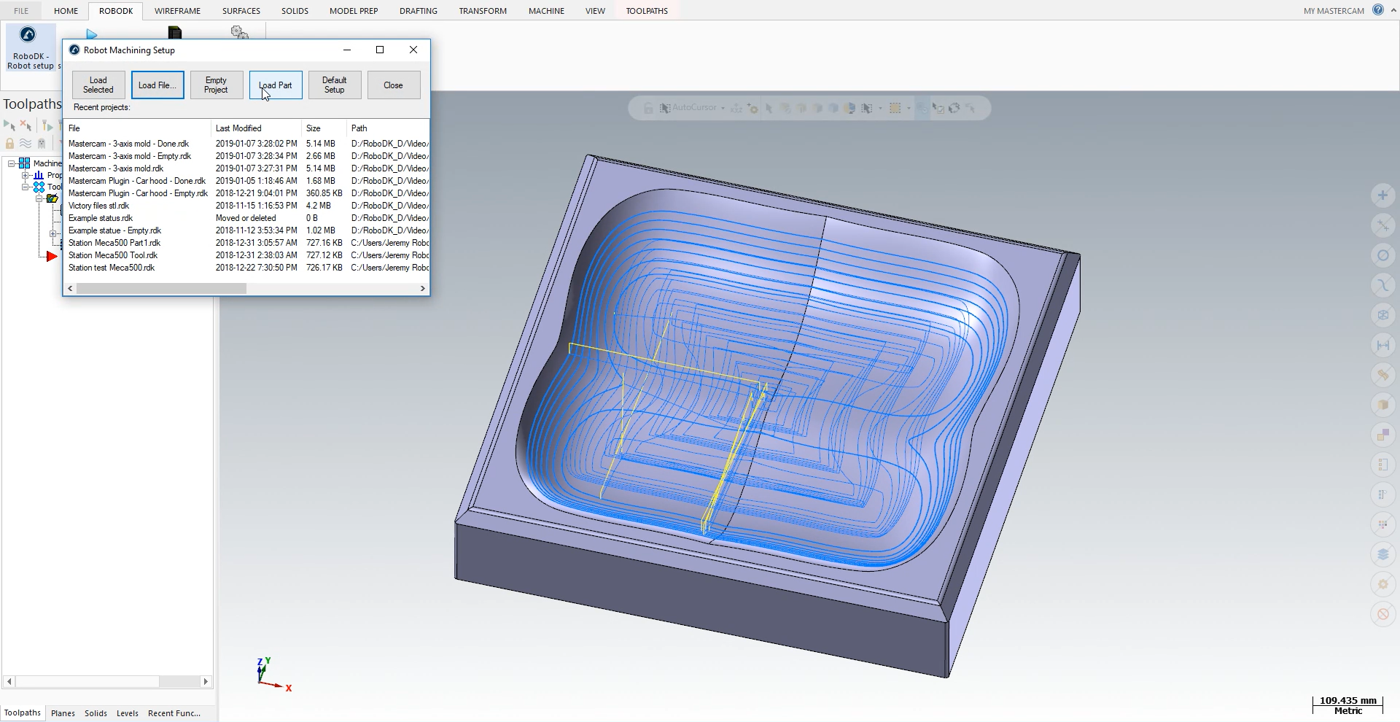
RoboDKステーションのテーブル上のアクティブなリファレンスフレーム(加工リファレンス)にパーツがロードされているのが見えるはずです。
次のステップは、MastercamからRoboDKにカッティングパスをインポートすることです。
1.MastercamのRoboDKタブを選択します。
2.RoboDKを選択- 選択した操作を更新します。
3.RoboDKへ。
RoboDK におけるロボット加工
ロボットの加工パスがRoboDKにインポートされると、ロボットの加工ツールパスがRoboDKステーションの金型リファレンスにアタッチされているはずです。
また、カッティングパスの前後でアプローチとリトラクトの動作の値を調整することもできます。この例では100mmで問題ないでしょう。衝突の危険性がある場合は、ロボットの動作範囲内でいくらでも増やすことができます。
次のステップでは、
注意:RoboDKでは、スペースバーを押し続けるか、メニューの
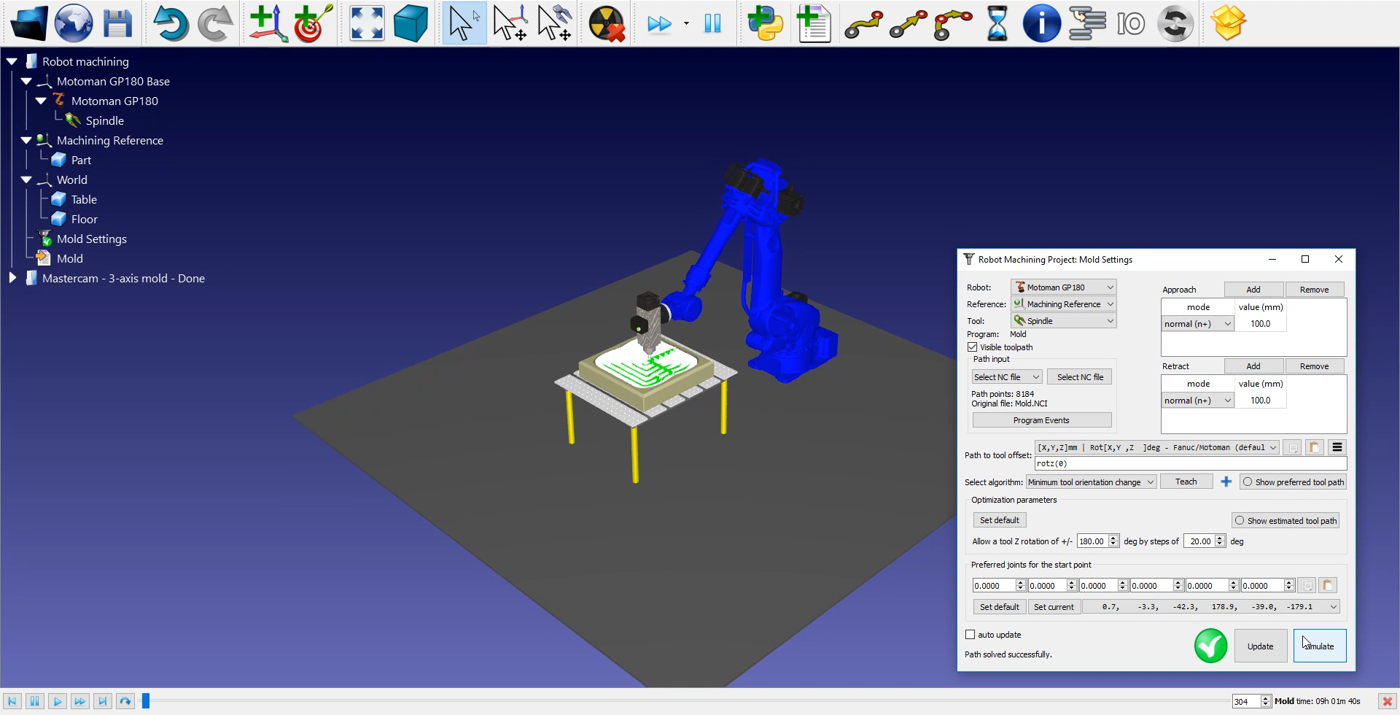
注意:パスに沿ってツールの向きを調整することができます。この例では、ツールのZ軸を中心に回転させることしかできませんが、標準の向きをお勧めします。
以下の手順に従って、ツールの向きを調整してください:
1.
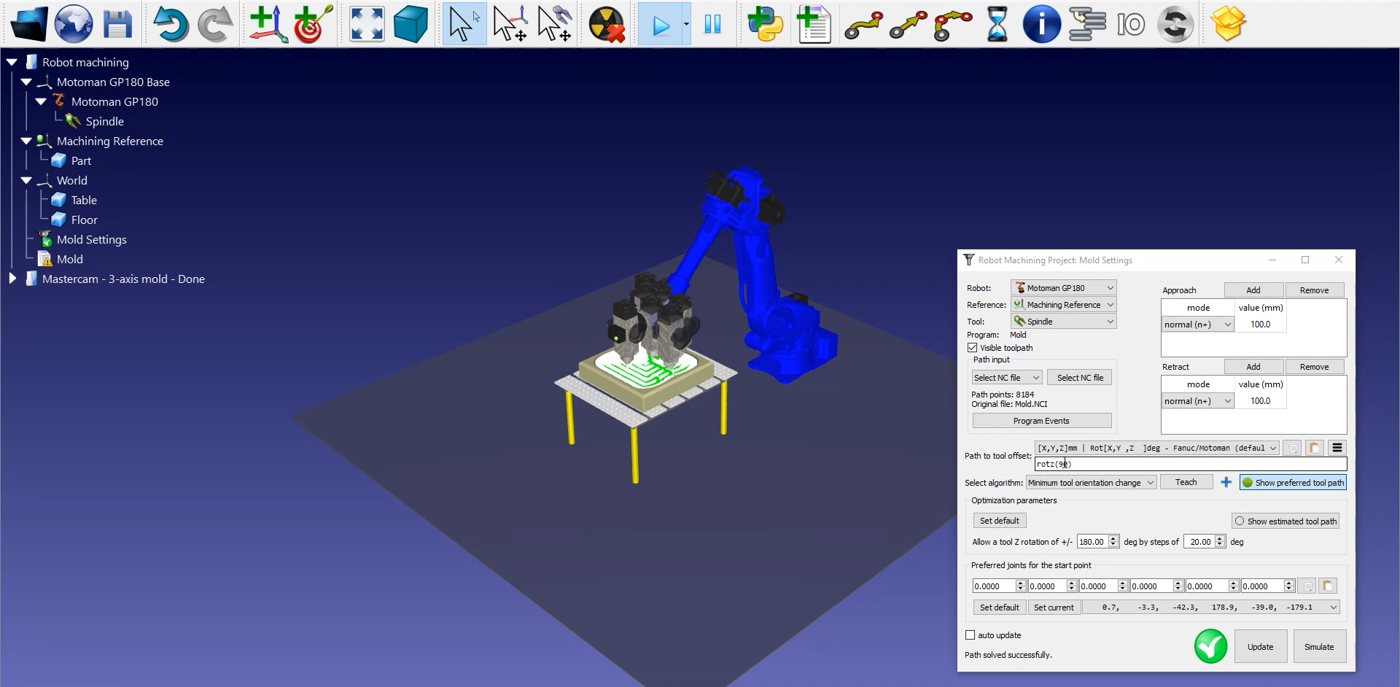
2.Show preferred tool pathを選択します。下の画像のように、いくつかのゴーストツールが表示されます。これらはパスに沿ったツールの位置を表しています。
3.ホイールを90度まで上にスクロールしてrotz (0)の値を変更します。rotzの値が変化し、それに伴ってゴーストトールの位置が変化するのがわかります。
4.Update➔ Simulate を選択します。
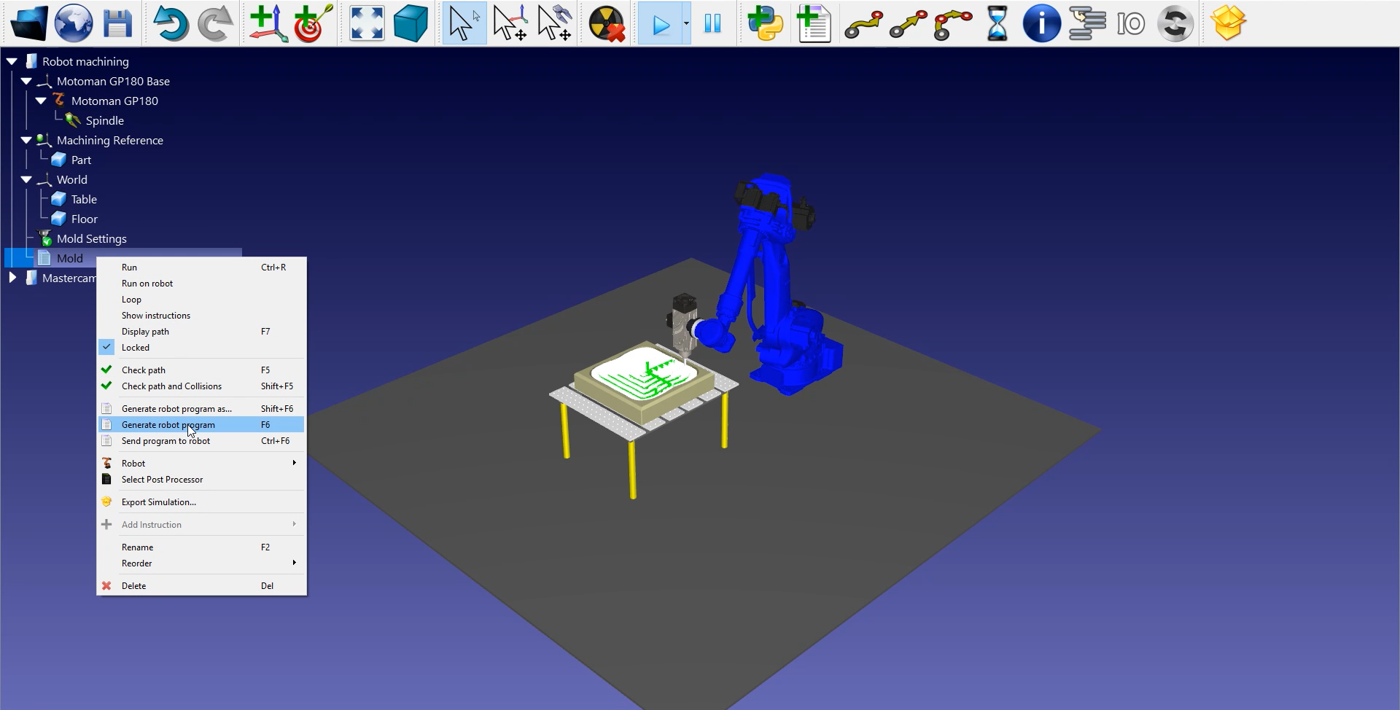
ロボットプログラムを生成するには、正しいポストプロセッサを使用してください。
最後に、
これでMotoman JBIファイルをロボットコントローラに転送する準備ができました。