ロボット加工パスの作成
APTファイルをロードしたら、更新を選択してRoboDKでロボット加工シミュレーションを作成することができます。これにより、ロボットが製造作業を実行できるかどうかを確認することができます。
この例では、単純な3軸加工を行い、デフォルト設定で有効な結果が得られます。ロボット加工プロジェクトでは、加工ツールパスに沿ったロボットの動作を制御することができます。
以下の手順に従って、残りのロボット加工作業を更新することができます:
1.1つまたは複数のロボット加工作業を選択します(Shiftを押したまま、ツリー内に複数の項目を生成できます)。
2.選択した項目を右クリックします。
3.プログラムの更新を選択します。
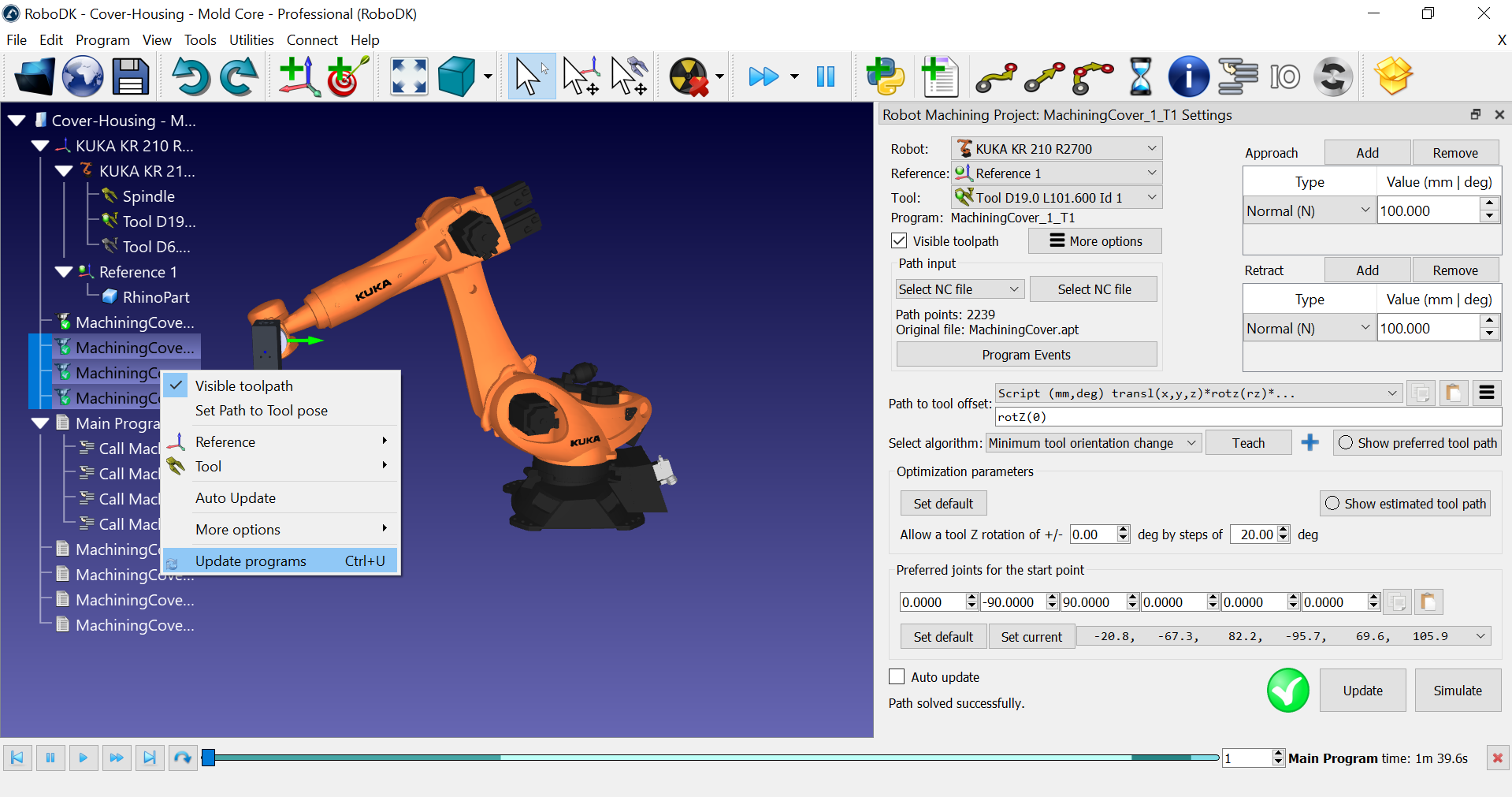
RoboDK がロボットの加工経路を計算すると、加工ごとに新しいロボットプログラムが作成されます。白いアイコンがロボットプログラムです。これらのプログラムはRoboDKによって自動的に作成されます。ツリー上でダブルクリックすると、それぞれのプログラムを個別にシミュレーションすることができます。
また、RoboDKは自動的にメインプログラムを作成し、これを実行することでロボットのすべての加工動作を順番にシミュレーションすることができます。