ロボットプログラムの生成
1つまたは複数のプログラムを右クリックし、Generate the robot programsを選択すると、ロボットコントローラのロボットプログラム(ファイル)を生成または更新することができます。
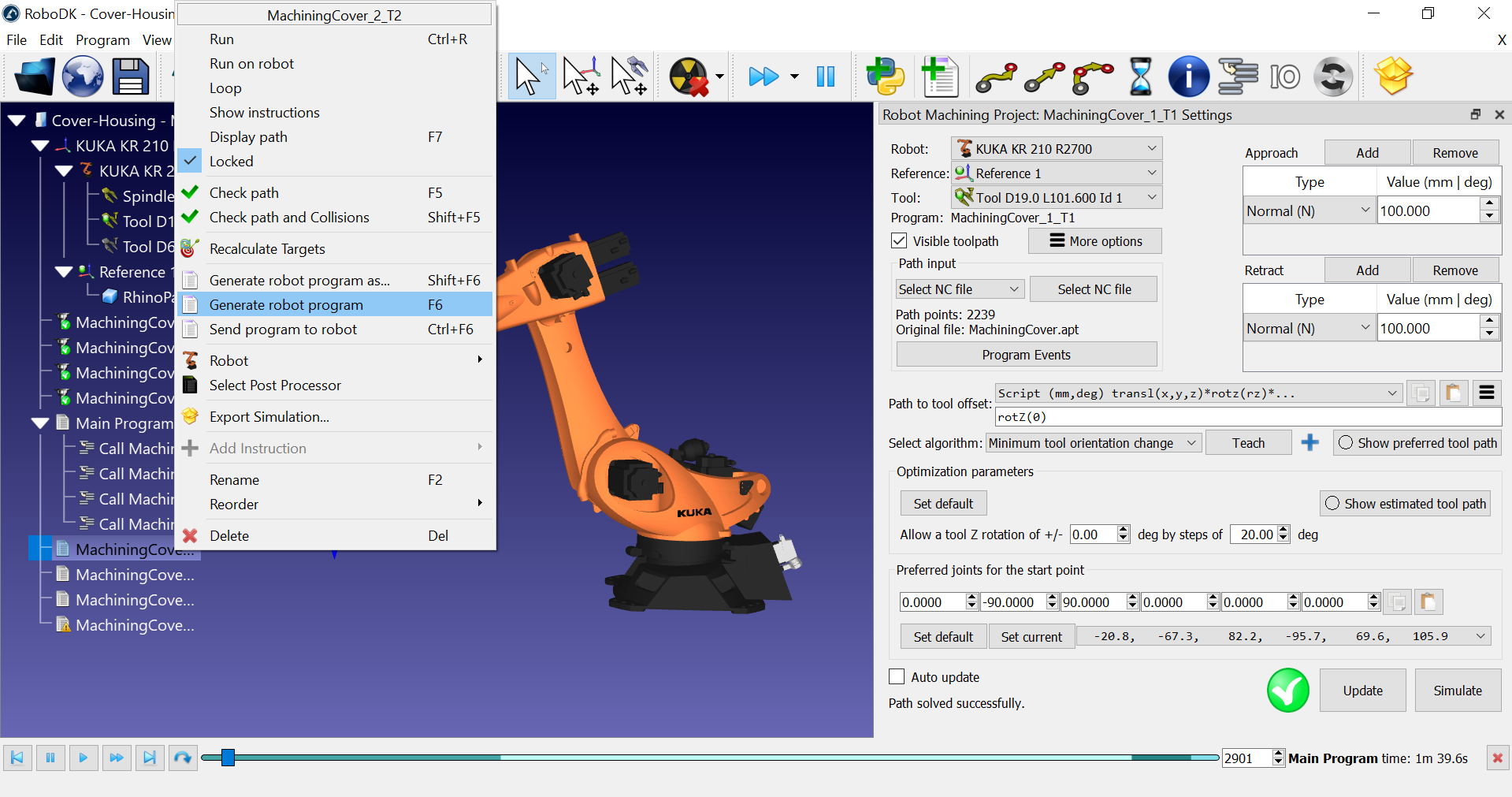
ヒント:ロボットプログラムファイルを生成する前に、メインプログラムをダブルクリックしてシミュレーションを素早くプレビューし、問題がないことを確認することができます。
この例では、KUKA KRCロボットコントローラを使用する場合、SRCプログラムファイルを取得します。
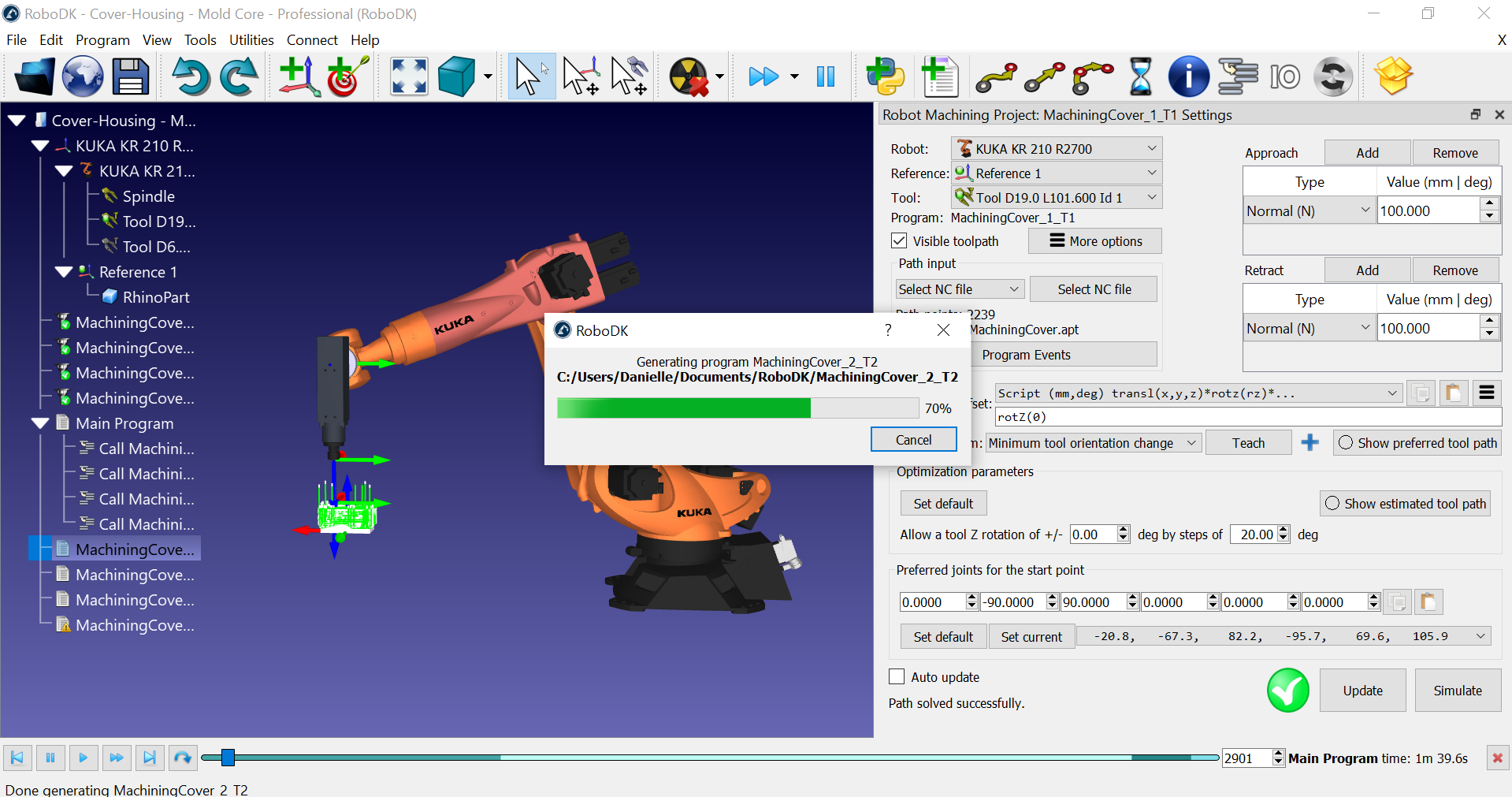
RoboDKで定義したのと同じように、リファレンスとツールが定義されているはずです。
また、番号付きリファレンスやツール名を使用して、コントローラに格納されている値のIDを指定して使用することもできます。
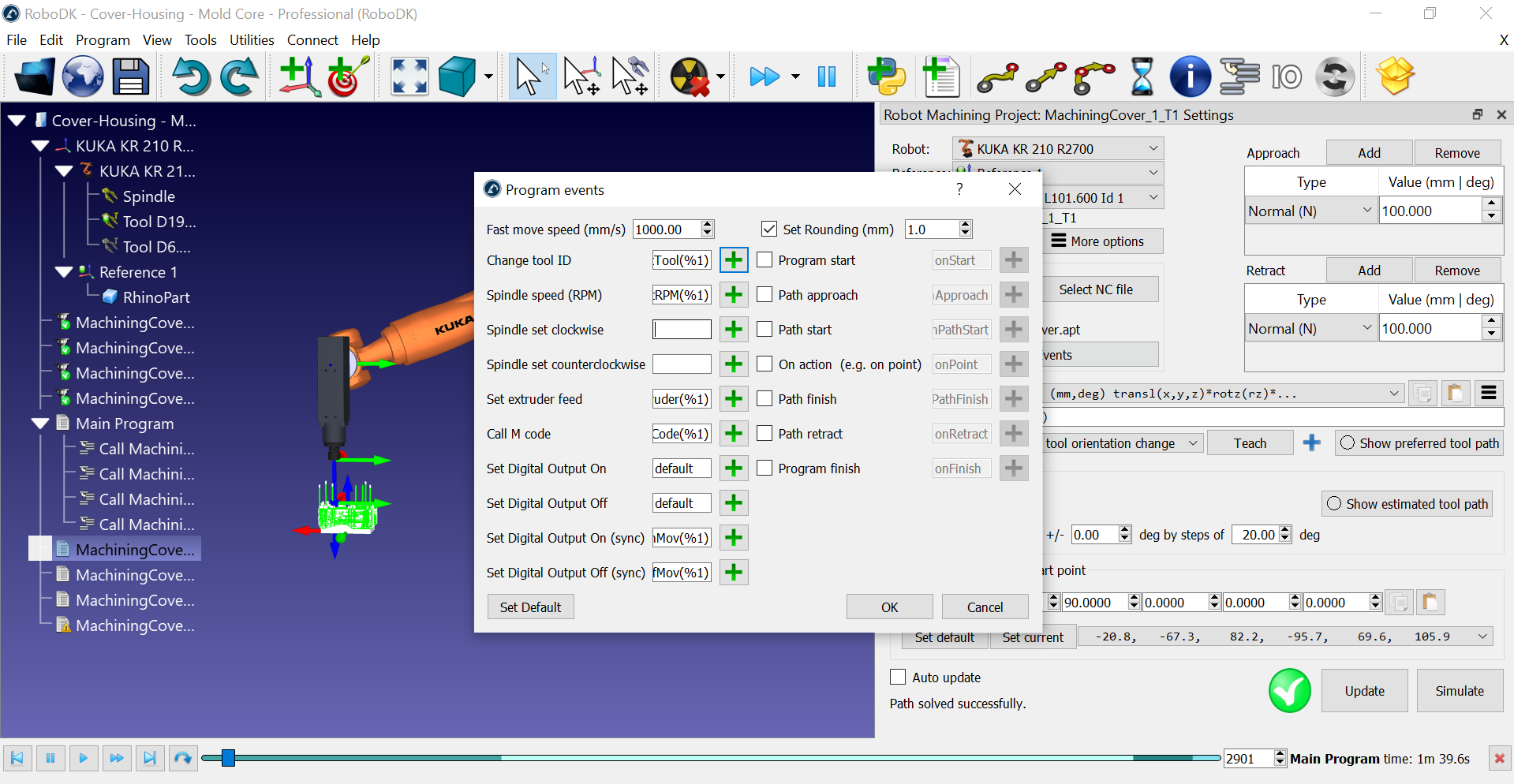
ツールIDに従って正しいツールを選択し、スピンドルをアクティブにするカスタムプログラムコールを見ることができます。これらの設定はProgram Events メニューでカスタマイズできます。ツールやスピンドル速度の変更、Mコードの実行など、特定の加工コマンドを実行する必要がある場合に、ロボットコントローラで特別な手順をトリガーすることができます。