RhinoCAM
ここでは、Mecsoft RhinoCAM から RoboDK に加工ジョブをエクスポートする方法を説明します。APT ファイルを使用して RoboDK にツールパスを読み込み、カスタム BAT ファイルを使用して自動的に送信します。
RhinoCAMで以下の手順に従って加工ジョブをRoboDKにエクスポートします:
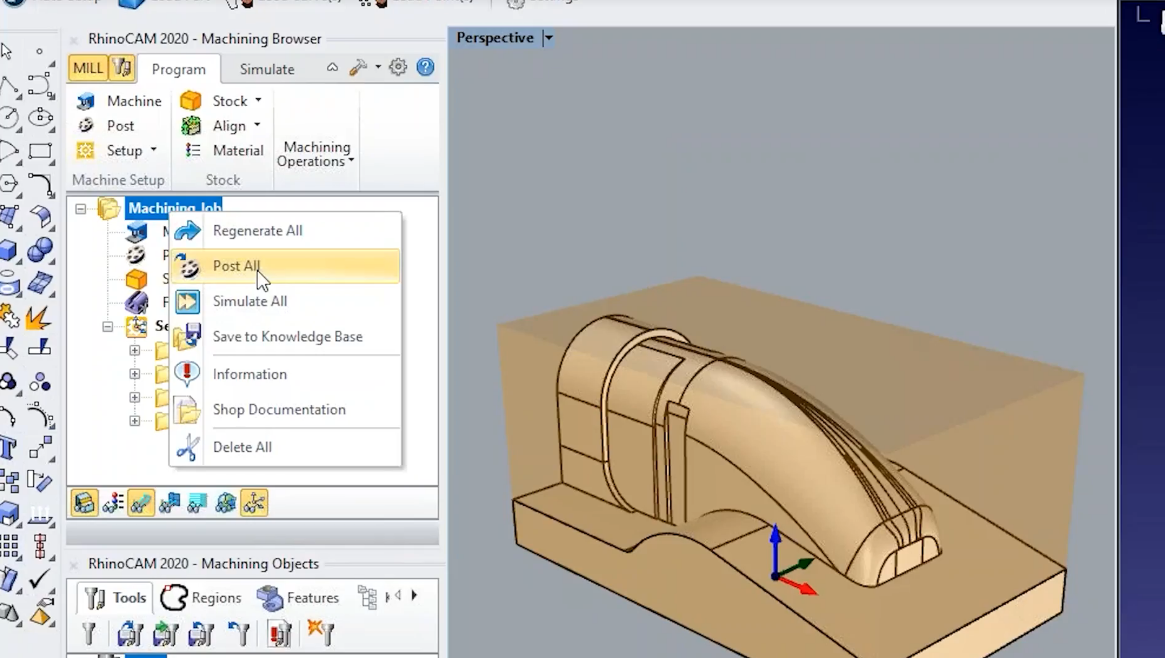
1.RhinoCAMから加工プロジェクトを右クリックします。
2.Post Allを選択すると、加工プログラムが生成され、RoboDKに自動的にロードされます。
RoboDKは、CAMソフトウェアで作成したのと同じ4つの加工オペレーションで、ロボット加工プログラムを自動的に分割していることがわかります。
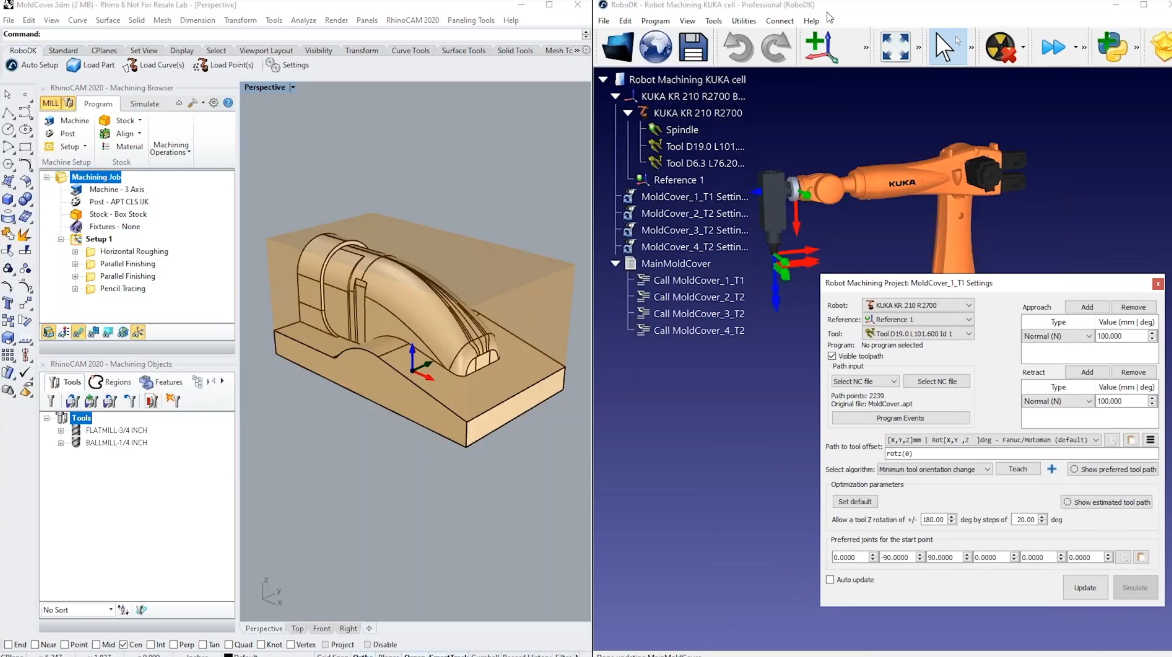
ロボット加工プロジェクトは、カスタマイズ可能なデフォルトのロボットセルを使用して作成されます。この例では、KUKAロボットとデフォルトのスピンドルを使用し、ツール(またはTCP)はツールホルダを表します。
ヒント:使用する加工プログラムの名前は、ロボットのファイル生成が完了した後、コントローラに表示されるプログラムの名前になります。
デフォルトでは、RoboDK は APT プログラムをロードする際に、加工プロジェクトで定義したツールを追加します。APTファイルをロードすると、工具はアクティブなTCPに追加されます。正しいツールはロボット加工プロジェクトでもあらかじめ選択されています。