ツールの向きをカスタマイズ
ほとんどの機械加工や製造作業では、5軸の制約があります。ツール(TCP)と切削軸の位置は定義されていますが、6軸ロボットアームを使用する場合は、さらに自由度が追加されます。この自由度により、切削軸の周りを旋回し、特異点や軸の制限を自動的に回避することができます。
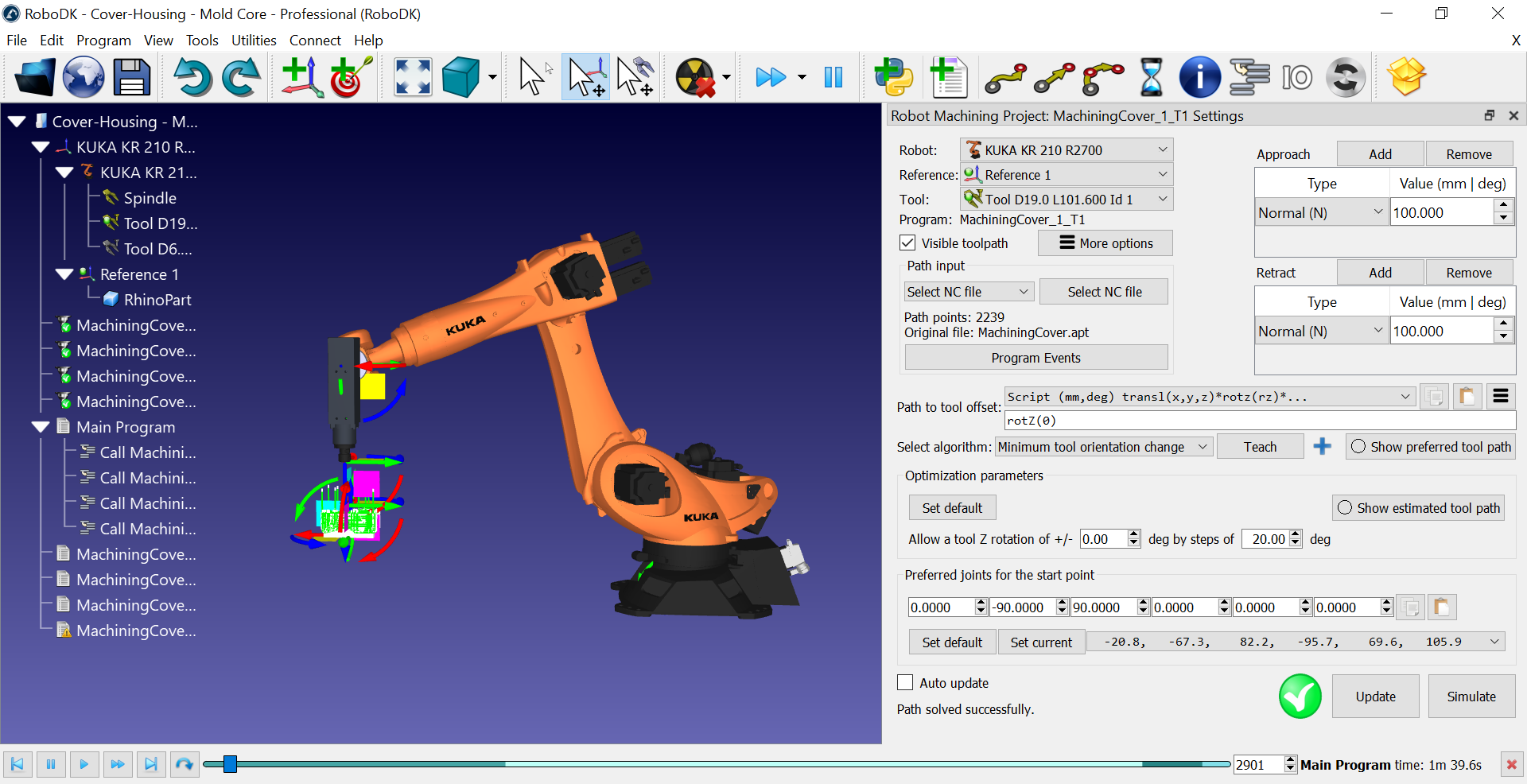
ツールの向きをカスタマイズする最も簡単な方法は、ロボット加工プロジェクトで Teach ボタンを選択することです。Teachを選択することで、RoboDKに現在のツールの向きに従いたいことを伝え、その向きに合うように設定が調整されます。
Show preferred tool pathを選択することで、ロボットがたどろうとしているツールの向きをプレビューすることができます。
UpdateとSimulateを選択して結果を確認できます。
最適化パラメータは、ロボットが希望する向きを達成できない場合に、ロボットが自動的にツールの向きを変更することを可能にします。このパラメータは、パーツが大きい場合、特異点の近くで作業している場合、またはロボットのワークスペースの限界に近い場合に重要です。赤いマークが表示されている場合は、ロボットがその作業を実行できないことを意味します。
Show estimated tool pathを選択すると、到達可能な位置が緑色で表示されます。これは、パスを実現可能にするためにどのような向きになるかのヒントになります。これは、ロボットの特異点や軸の制限を自動的に回避するために、追加の自由度を使用していることを意味します。
ヒント1つのロボット加工操作の設定をカスタマイズしたら、そのロボット加工操作を右クリックして、Copy settingsを選択し、残りの操作を一括選択して、Paste settingsを選択します。その後、Updateを選択してロボット加工プログラムを再計算できます。