Robot Machining
はじめに
この例題では、RoboDKでのロボット加工の基本を理解し、3軸ロボット加工ジョブをロボット加工シミュレーションとロボットプログラムに変換する方法を説明します。
CAMソフトウェアで加工方法を定義したら、加工プログラムをGコードまたはAPTファイルとしてエクスポートし、RoboDKに読み込ませてロボット加工プロジェクトを作成することができます。この例では、APT ファイルを使用してロボット加工プロジェクトを作成します。
このサンプル RoboDK プロジェクトは以下の場所にあります C:/RoboDK/Other/Plugin-MecSoft/Mold-Core.rdk.
ビデオ3軸ロボット加工のためのRoboDKロボット加工機能の使い方:https://www.youtube.com/watch?v=NH_htrrtSPg.
ロボット加工例(3軸)
この例では、加工プログラムをロボット加工シミュレーションとロボットプログラムに変換する方法を学びます。具体的には、APTファイルなどのNCファイルからロボットコントローラに有効なロボットプログラムを生成する方法を。
ヒントRoboDKで利用可能なロボット加工設定の詳細については、ロボット加工のセクションをご覧ください。
ヒント: この例ではMecsoft RhinoCAMからファイルをエクスポートしていますが、APTファイルをRoboDKのBATファイルに使用して加工プログラムを直接RoboDKに送信し、RoboDKで自動的にセットアップを作成するオプションもあります。この統合により、デフォルトのセットアップを使用して、CAMプロジェクトからロボット加工プログラムを自動的に読み込むことができます。
RhinoCAMでの加工プログラム
ここでは、Mecsoft RhinoCAM から RoboDK に加工ジョブをエクスポートする方法を説明します。APT ファイルを使用して RoboDK にツールパスを読み込み、カスタム BAT ファイルを使用して自動的に送信します。
RhinoCAMで以下の手順に従って加工ジョブをRoboDKにエクスポートします:
1.RhinoCAMから加工プロジェクトを右クリックします。
2.Post Allを選択すると、加工プログラムが生成され、RoboDKに自動的にロードされます。
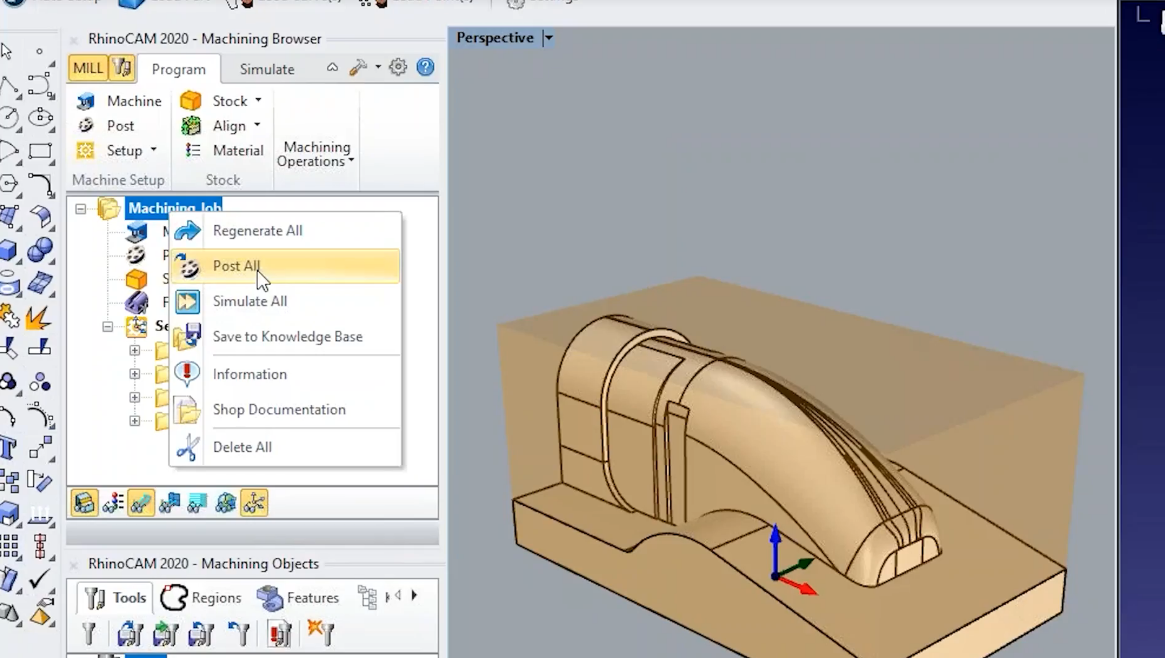
RoboDKは、CAMソフトウェアで作成したのと同じ4つの加工オペレーションで、ロボット加工プログラムを自動的に分割していることがわかります。
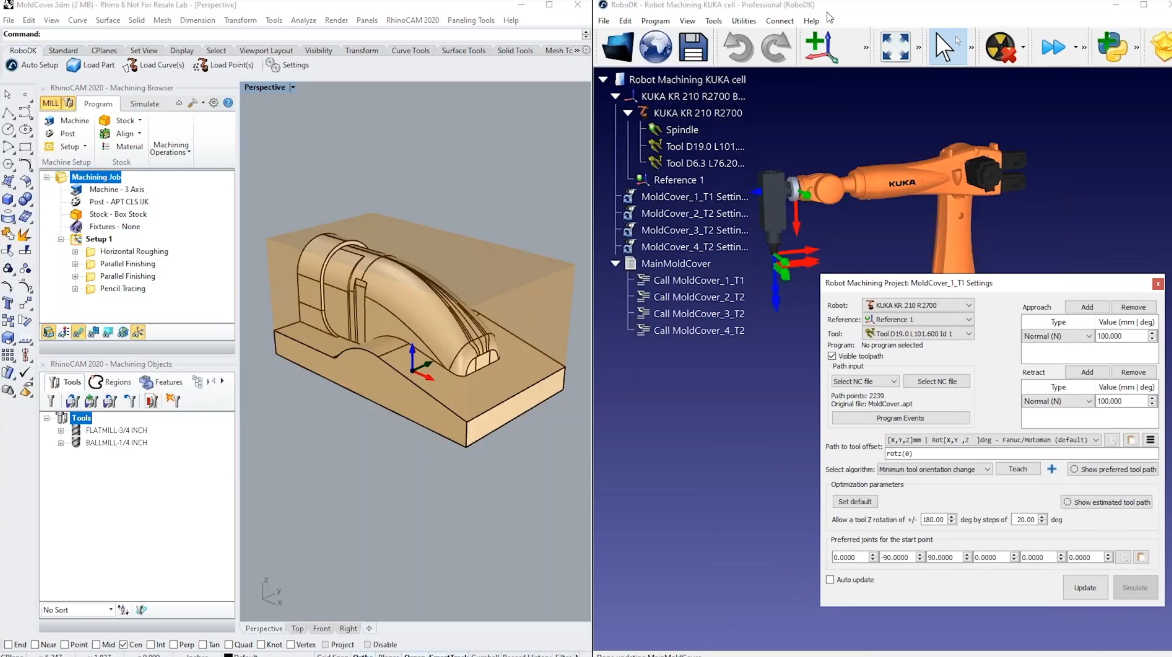
ロボット加工プロジェクトは、カスタマイズ可能なデフォルトのロボットセルを使用して作成されます。この例では、KUKAロボットとデフォルトのスピンドルを使用し、ツール(またはTCP)はツールホルダを表します。
デフォルトでは、RoboDK は APT プログラムをロードする際に、加工プロジェクトで定義したツールを追加します。APTファイルをロードすると、工具はアクティブなTCPに追加されます。正しいツールはロボット加工プロジェクトでもあらかじめ選択されています。
ロボット加工プロジェクト(3倍)
このセクションでは、ロボット加工を成功させるために、ロボットのセットアップと加工ツールパスをカスタマイズする方法を紹介します。RoboDKの加工プロジェクトでは、一般的な3軸または5軸の製造オペレーションをロボットシミュレーションとロボットプログラムに変換することができます。
加工ファイルを直接読み込んだので、すべてが自動的に作成され、選択されています。RoboDKでアプローチとリトラクトの動きをカスタマイズすることもできます。
注意: このRoboDKプロジェクトは以下の場所にあります:C:/RoboDK/Other/Plugin-MecSoft/Mold-Core.rdk.
ヒント: CAMソフト上で小さなアプローチ/リトラクトの動きを残しておくとよいでしょう。後でRoboDKでカスタマイズできます。
ロボット加工パスの作成
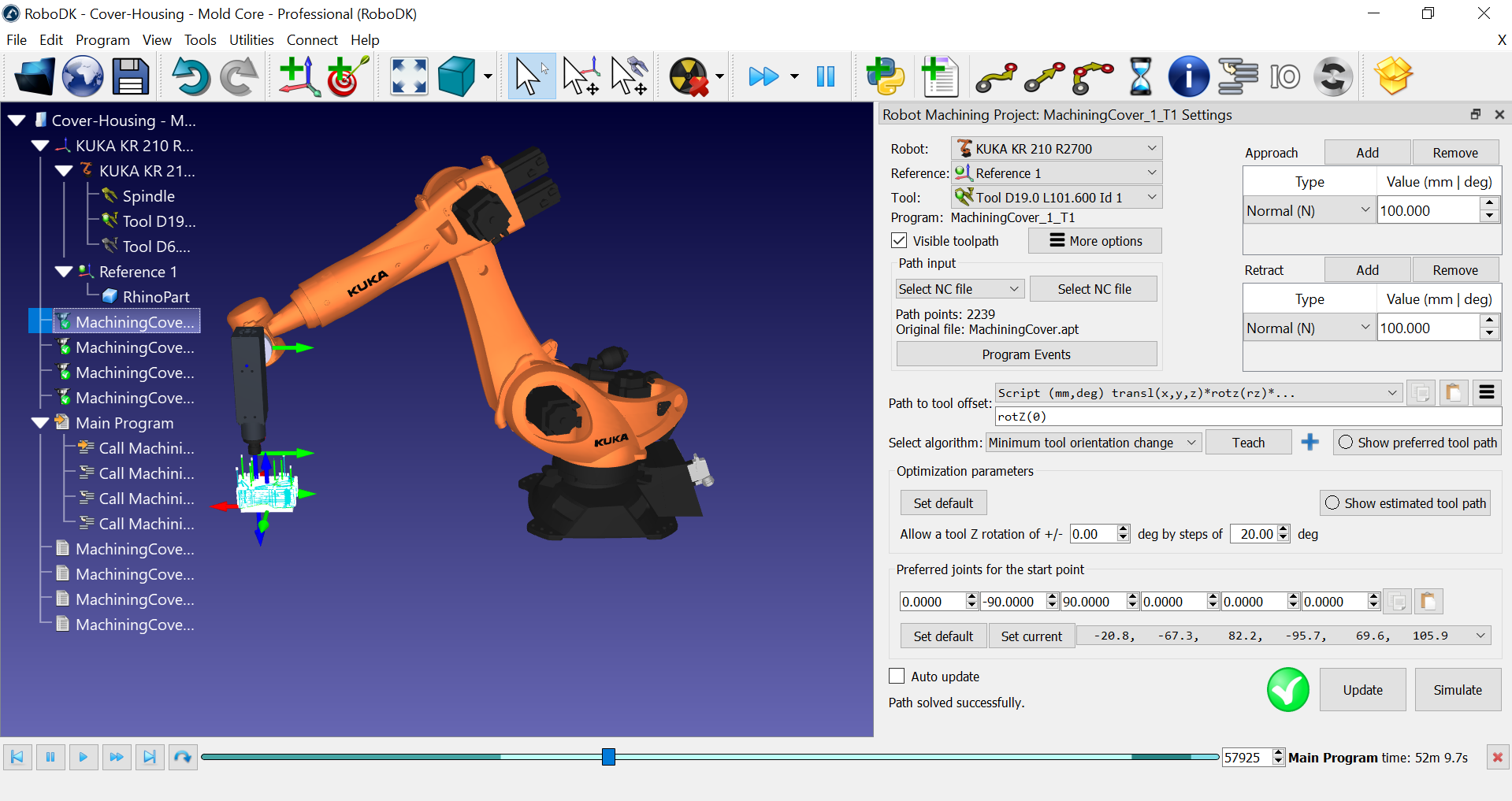
APTファイルをロードしたら、更新を選択してRoboDKでロボット加工シミュレーションを作成することができます。これにより、ロボットが製造作業を実行できるかどうかを確認することができます。
この例では、単純な3軸加工を行い、デフォルト設定で有効な結果が得られます。ロボット加工プロジェクトでは、加工ツールパスに沿ったロボットの動作を制御することができます。
以下の手順に従って、残りのロボット加工作業を更新することができます:
1.1つまたは複数のロボット加工作業を選択します(Shiftを押したまま、ツリー内に複数の項目を生成できます)。
2.選択した項目を右クリックします。
3.プログラムの更新を選択します。
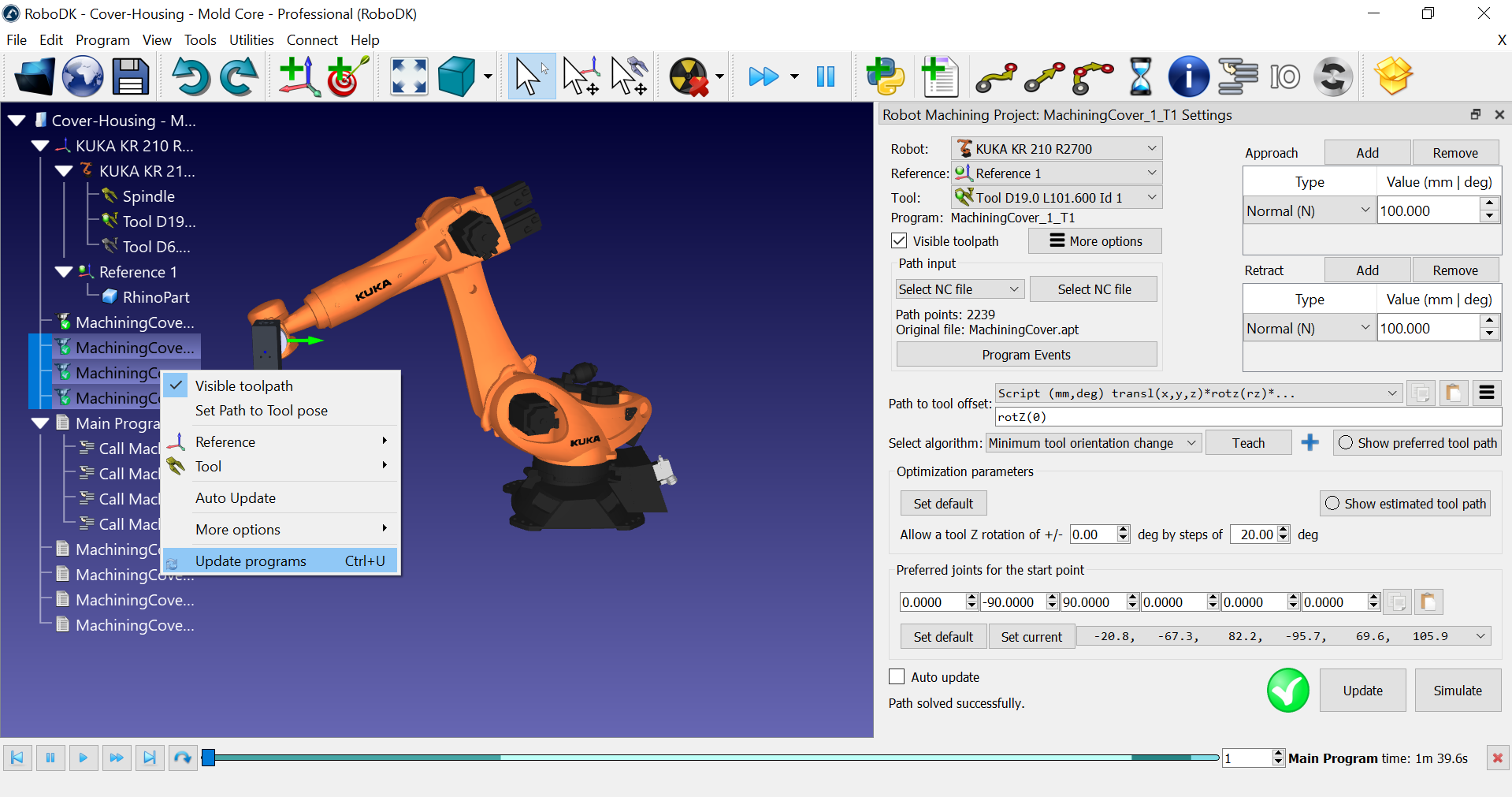
RoboDK がロボットの加工経路を計算すると、加工ごとに新しいロボットプログラムが作成されます。白いアイコンがロボットプログラムです。これらのプログラムはRoboDKによって自動的に作成されます。ツリー上でダブルクリックすると、それぞれのプログラムを個別にシミュレーションすることができます。
また、RoboDKは自動的にメインプログラムを作成し、これを実行することでロボットのすべての加工動作を順番にシミュレーションすることができます。
ロボット加工のシミュレーション
メインプログラムをダブルクリックすると、ロボット全体の加工をシミュレートできます。また、サブプログラムをダブルクリックしてシミュレーションすることもできます。
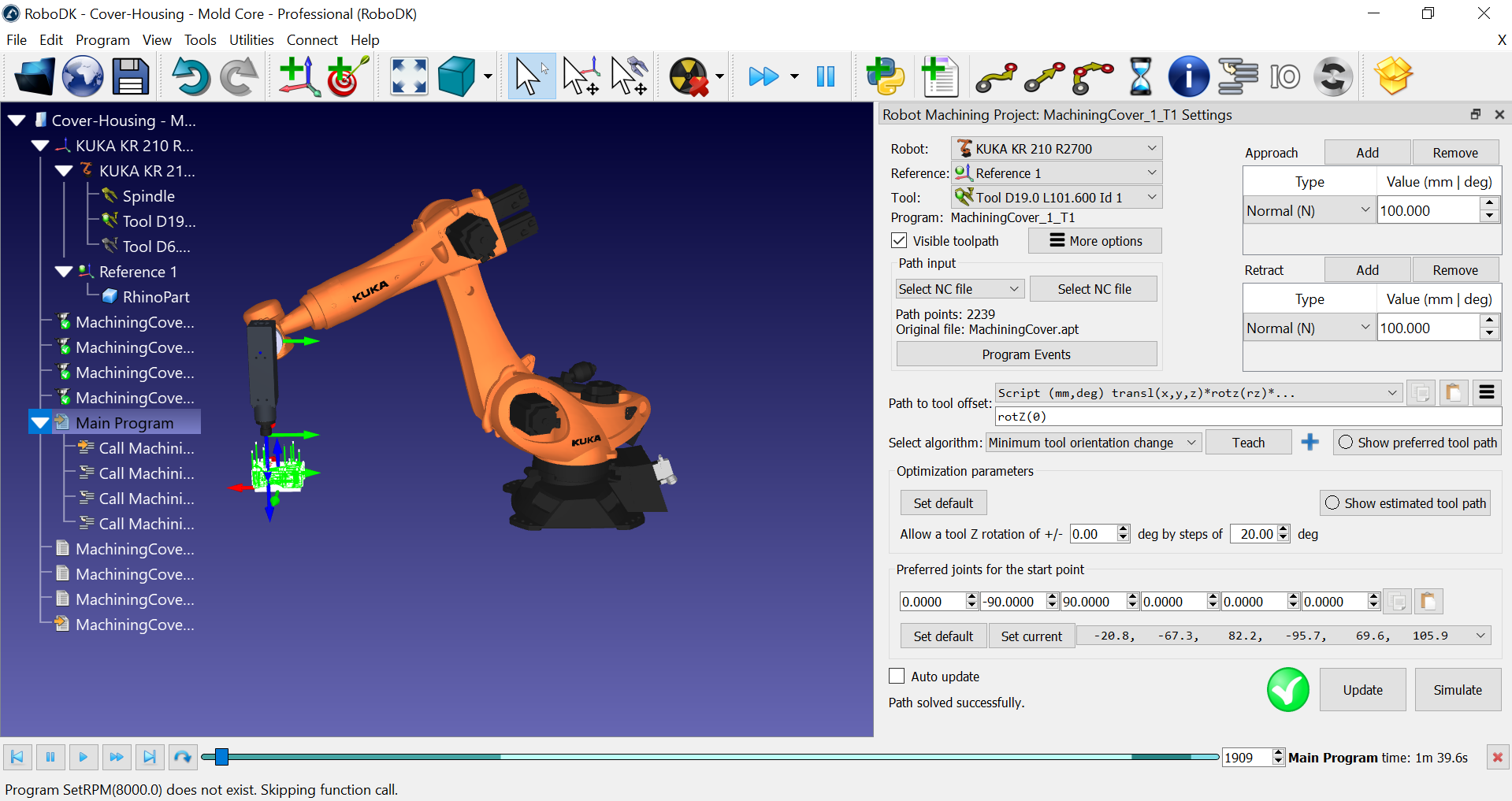
ヒントプログラムを右クリックし、"Display path "を選択すると、黄色のトレースが表示されます。
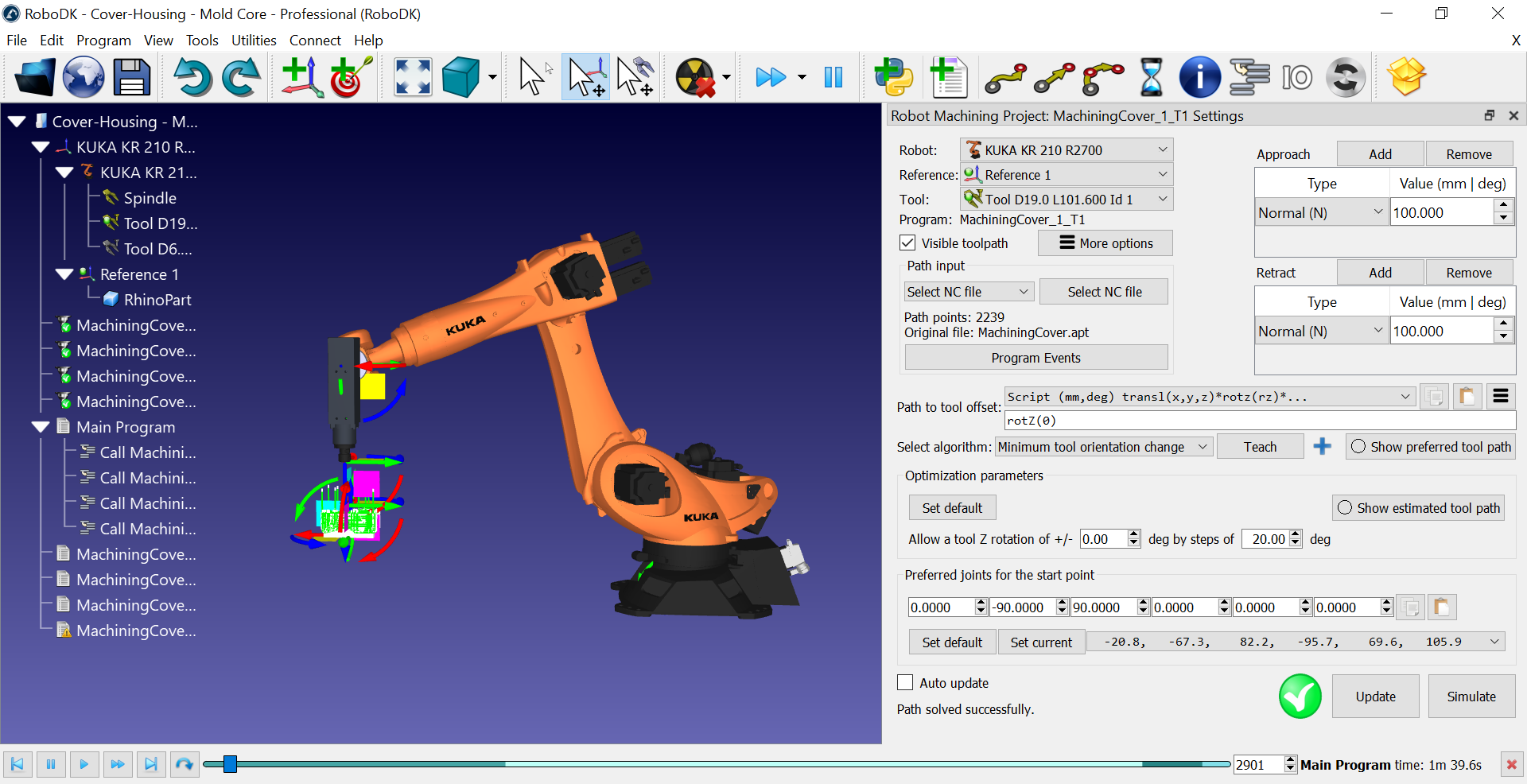
ツールの向きをカスタマイズ
ほとんどの機械加工や製造作業では、5軸の制約があります。ツール(TCP)と切削軸の位置は定義されていますが、6軸ロボットアームを使用する場合は、さらに自由度が追加されます。この自由度により、切削軸の周りを旋回し、特異点や軸の制限を自動的に回避することができます。
ツールの向きをカスタマイズする最も簡単な方法は、ロボット加工プロジェクトで Teach ボタンを選択することです。Teachを選択することで、RoboDKに現在のツールの向きに従いたいことを伝え、その向きに合うように設定が調整されます。
Show preferred tool pathを選択することで、ロボットがたどろうとしているツールの向きをプレビューすることができます。
UpdateとSimulateを選択して結果を確認できます。
最適化パラメータは、ロボットが希望する向きを達成できない場合に、ロボットが自動的にツールの向きを変更することを可能にします。このパラメータは、パーツが大きい場合、特異点の近くで作業している場合、またはロボットのワークスペースの限界に近い場合に重要です。赤いマークが表示されている場合は、ロボットがその作業を実行できないことを意味します。
Show estimated tool pathを選択すると、到達可能な位置が緑色で表示されます。これは、パスを実現可能にするためにどのような向きになるかのヒントになります。これは、ロボットの特異点や軸の制限を自動的に回避するために、追加の自由度を使用していることを意味します。
ヒント1つのロボット加工操作の設定をカスタマイズしたら、そのロボット加工操作を右クリックして、Copy settingsを選択し、残りの操作を一括選択して、Paste settingsを選択します。その後、Updateを選択してロボット加工プログラムを再計算できます。
ロボットプログラムの生成
1つまたは複数のプログラムを右クリックし、Generate the robot programsを選択すると、ロボットコントローラのロボットプログラム(ファイル)を生成または更新することができます。
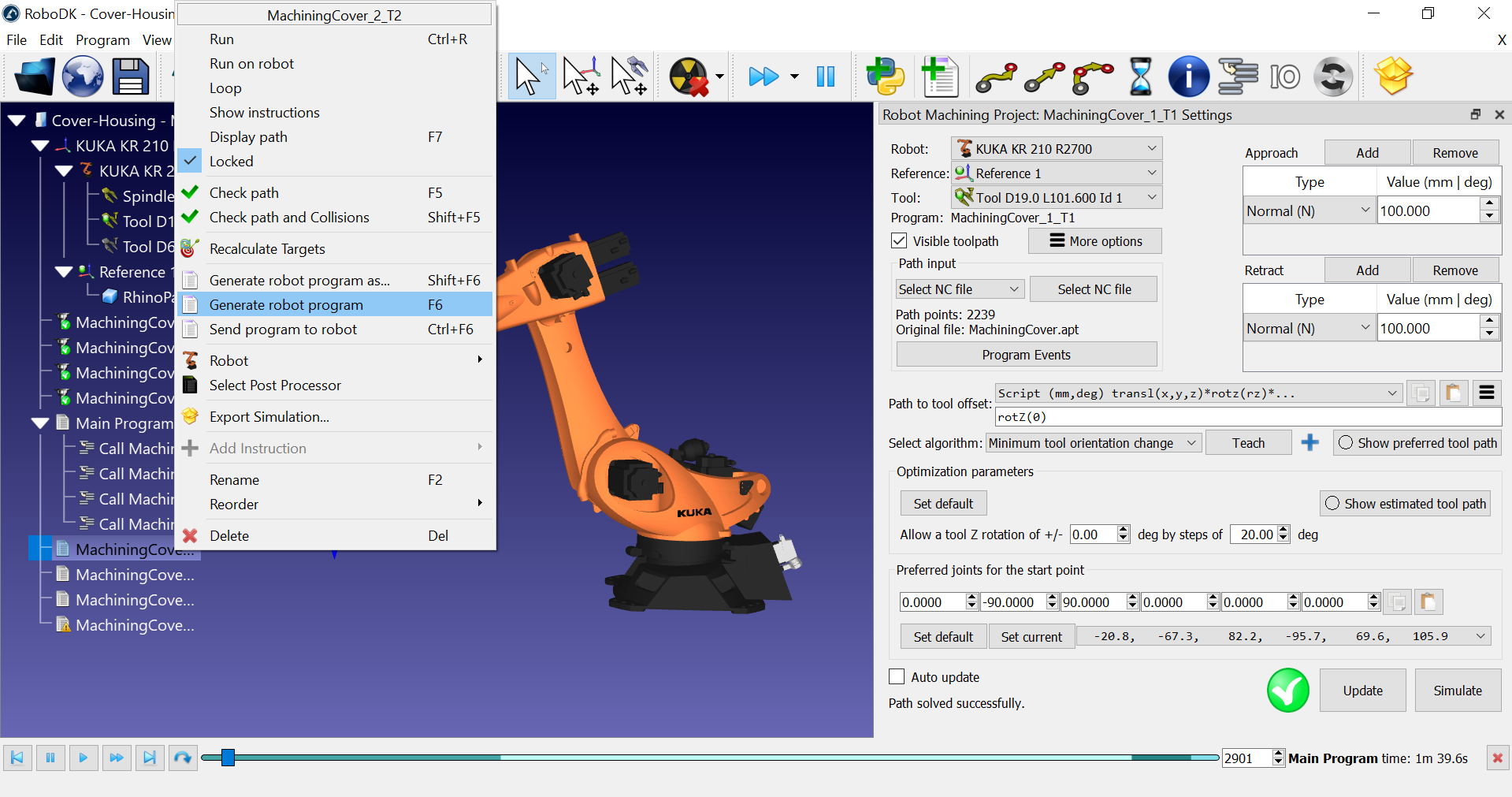
この例では、KUKA KRCロボットコントローラを使用する場合、SRCプログラムファイルを取得します。
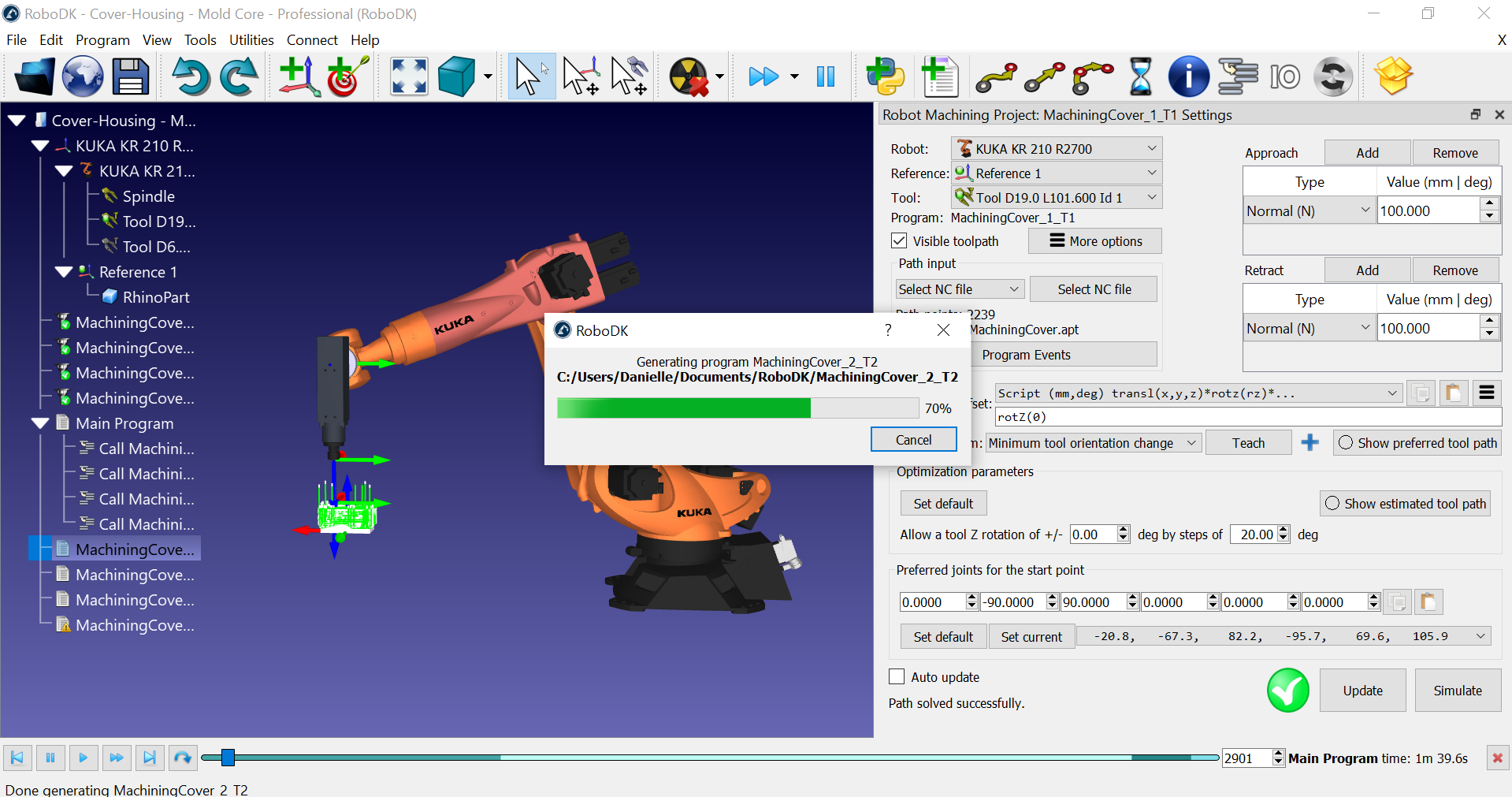
RoboDKで定義したのと同じように、リファレンスとツールが定義されているはずです。
また、番号付きリファレンスやツール名を使用して、コントローラに格納されている値のIDを指定して使用することもできます。
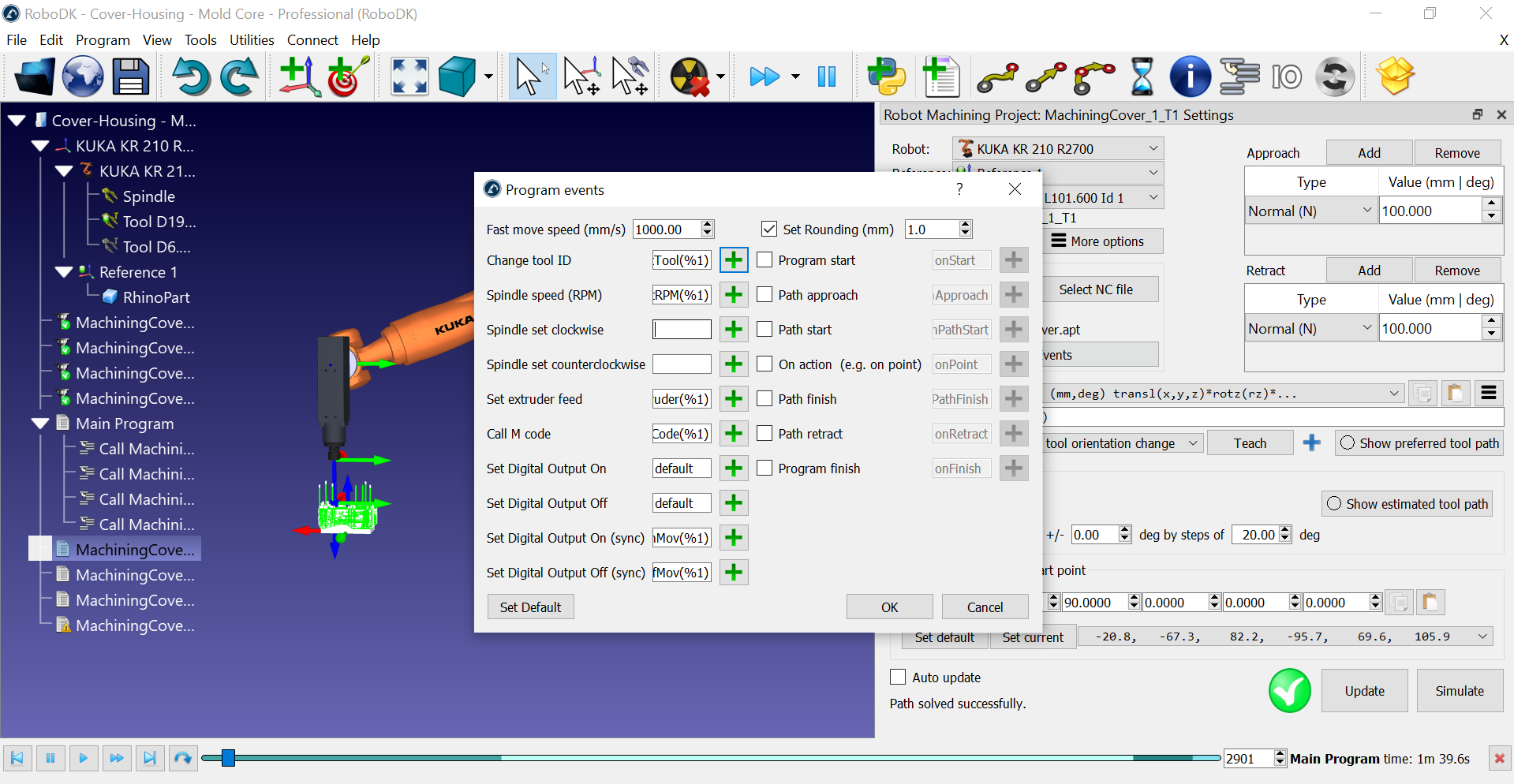
ツールIDに従って正しいツールを選択し、スピンドルをアクティブにするカスタムプログラムコールを見ることができます。これらの設定はProgram Events メニューでカスタマイズできます。ツールやスピンドル速度の変更、Mコードの実行など、特定の加工コマンドを実行する必要がある場合に、ロボットコントローラで特別な手順をトリガーすることができます。
ポストプロセッサーを変更
各ロボットには、ロボットコントローラに有効なコードを生成するデフォルトのポストプロセッサが関連付けられています。使用するロボットコントローラに応じて、プログラム出力を簡単に変更することができます。
ポストプロセッサーを変更するには、以下の手順に従ってください:
1.プログラムまたはロボットを右クリックします。
2.ポストプロセッサーを変更するには、「ポストプロセッサーを選択」を選択します。
この設定は、同じロボットを使用するすべてのプログラムに適用されます。
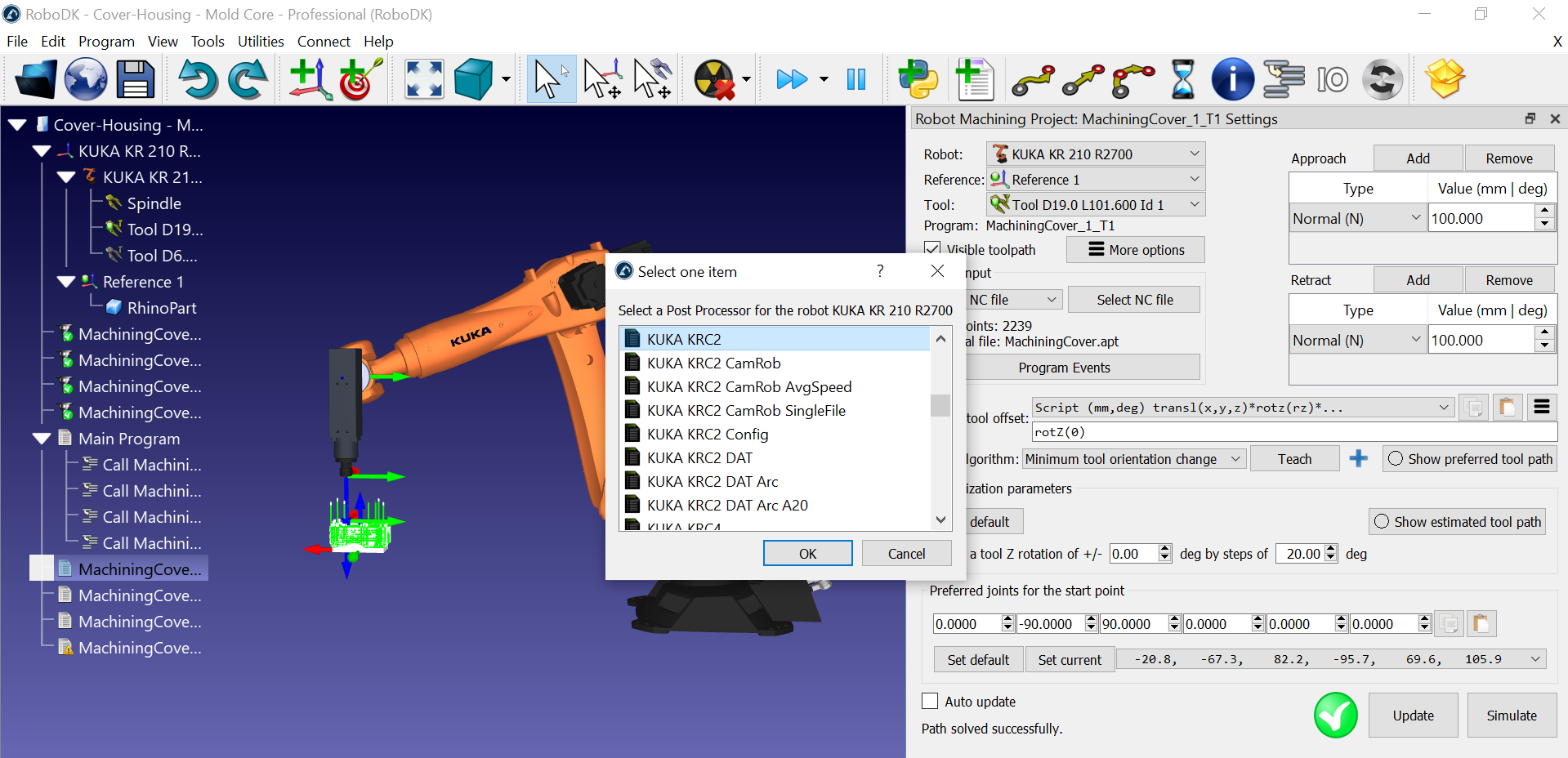
注:RoboDKには、50以上のロボットメーカーをサポートする80以上のポストプロセッサが含まれています。
KUKAロボットをお持ちの場合、デフォルトでKUKA KRC2ポストプロセッサーが選択されているはずです。これはKUKA KRC4コントローラとも互換性があるはずです。KRC4コントローラをお持ちの場合は、KUKA KRC4ポストプロセッサーを選択することができます。