Mastercam
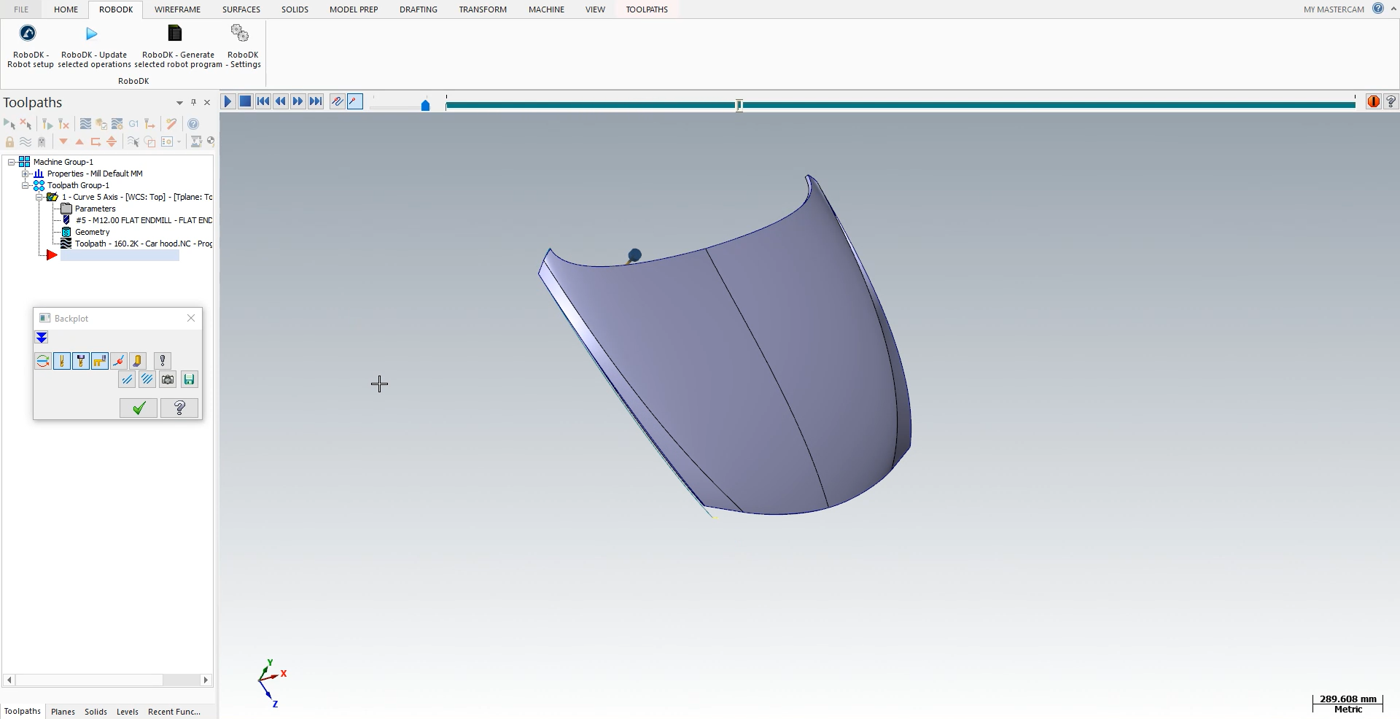
Mastercamで3Dオブジェクトを開き、切削シミュレーションを起動します。ソフトウェアが切削面に合わせて工具の向きを調整しているのがわかります
次の手順に従って、パーツをRoboDKにロードしてください:
1.RoboDKタブを選択し、RoboDK - Robot setupを選択します。
2.Load Partを選択します。
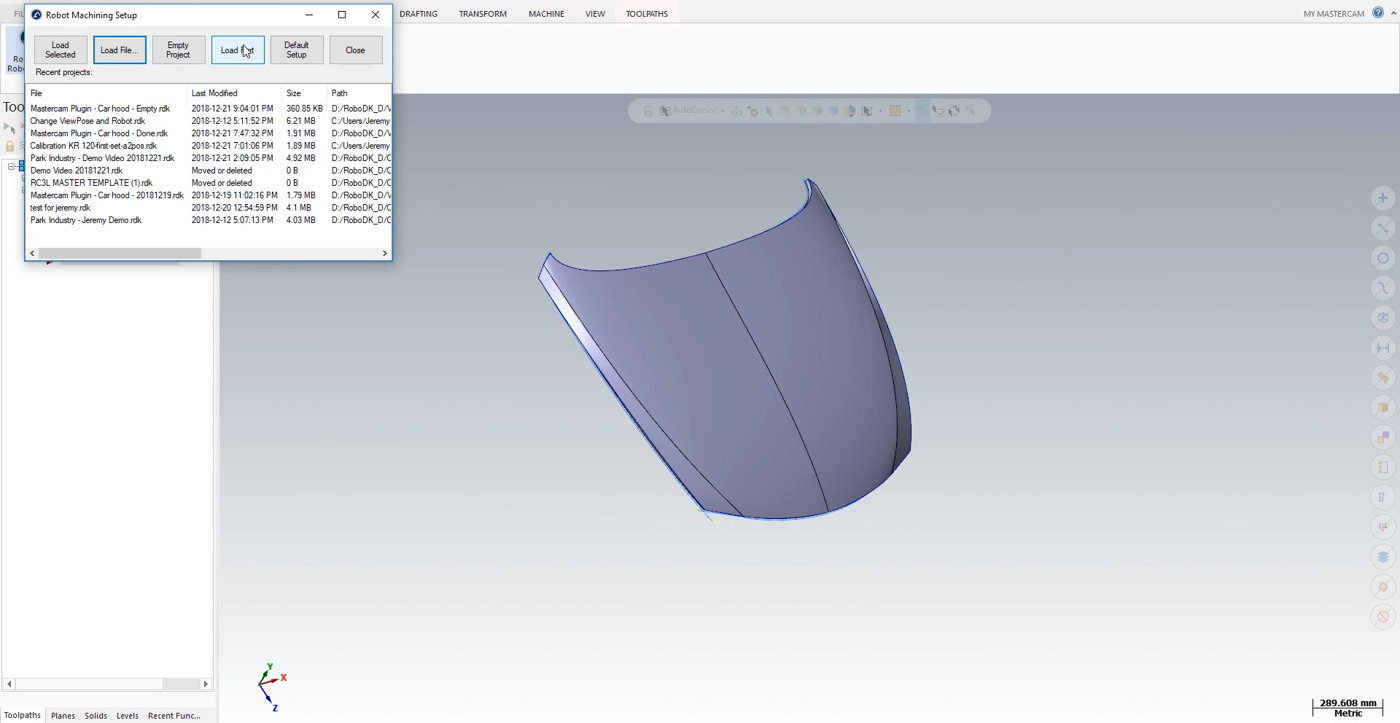
RoboDKステーションの治具上のアクティブリファレンスフレーム(加工リファレンス)にパーツがロードされているのが見えるはずです。
注意:パーツを正しい位置にインポートするには、Machining Referenceを特定の位置に設定する必要があります。Machining Reference➔ Visibleを右クリックしてフレームを表示します。パーツを作成する際、Mastercamでこの正確な位置に原点を設定します。パーツをインポートすると、RoboDKはパーツの原点と加工基準の原点を一致させます。
次のステップは、MastercamからRoboDKにカッティングパスをインポートすることです。
1.MastercamのRoboDKタブを選択します。
2.RoboDKを選択- 選択した操作を更新します。
3.RoboDKへ。