RoboDK
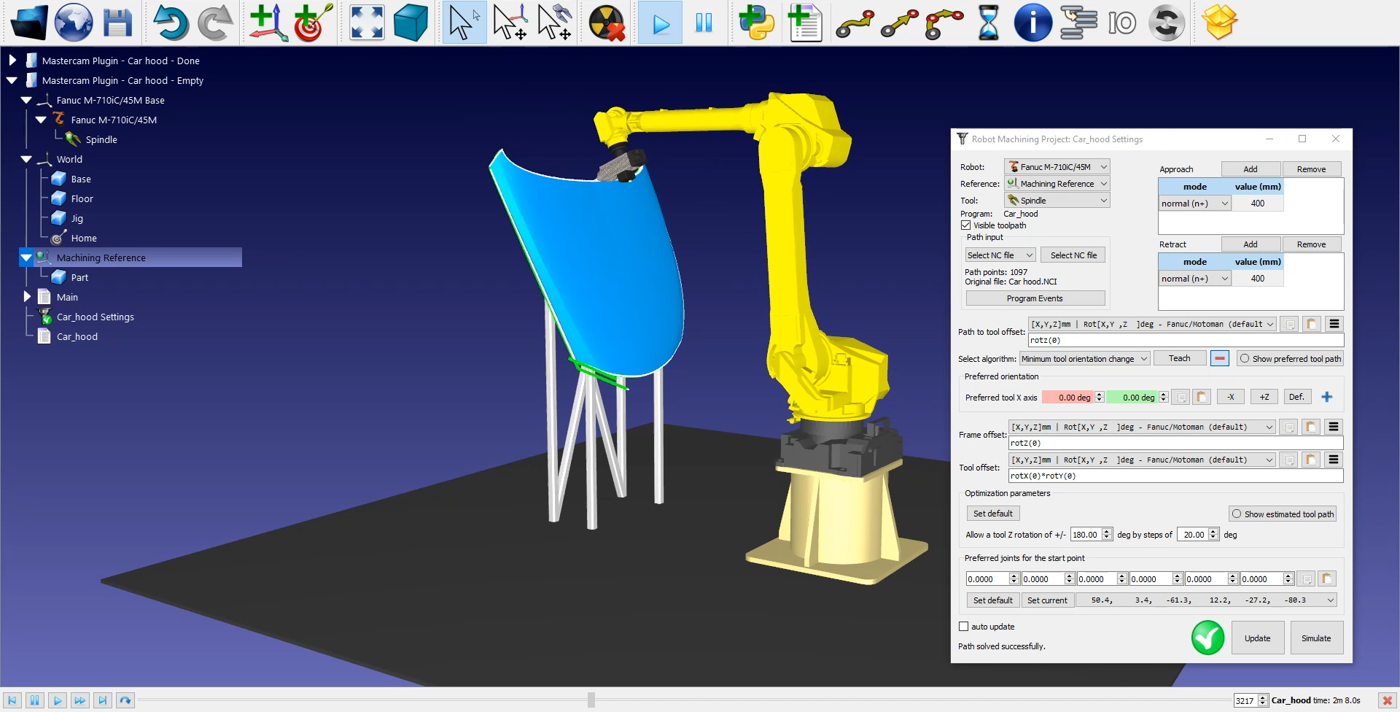
ロボットのカッティングパスがRoboDKにインポートされると、RoboDKステーションのモールドリファレンスにカッティングツールパスがアタッチされているはずです。
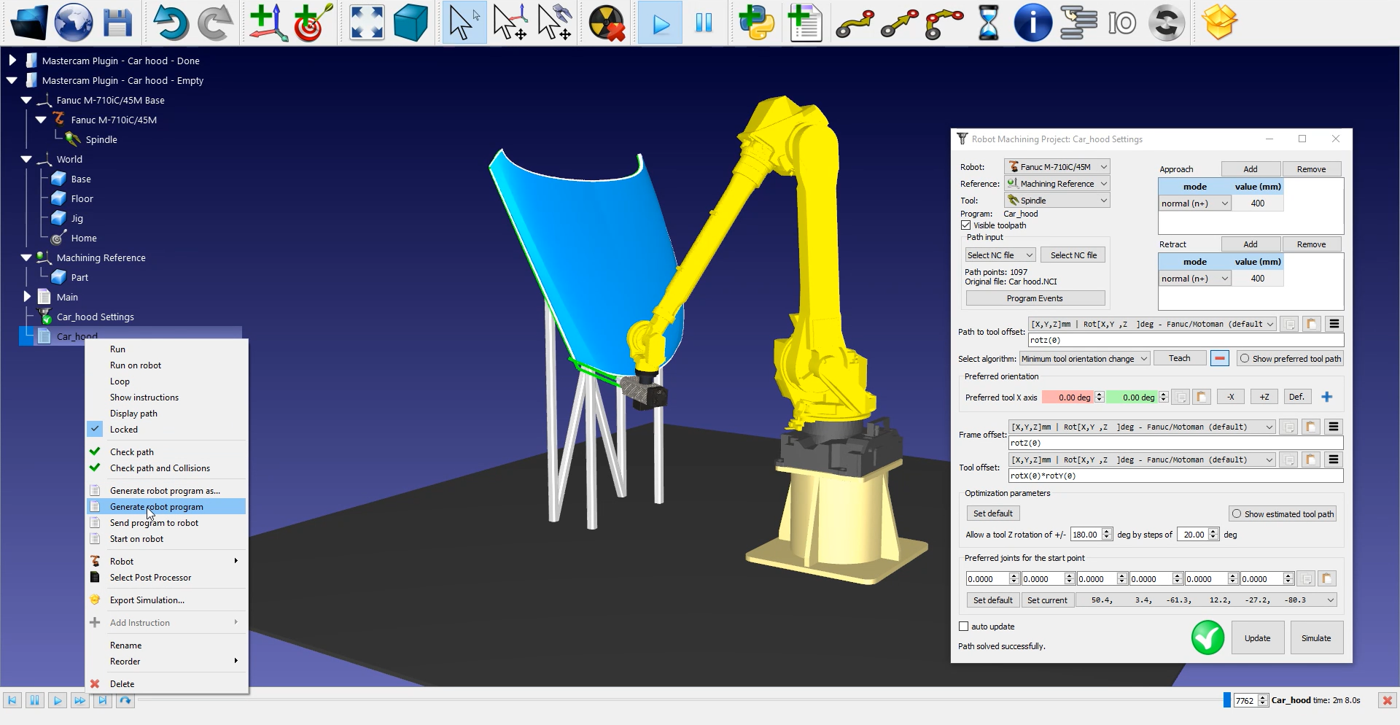
また、カッティングパスの前後でアプローチとリトラクトの動作の値を調整することもできます。この例では400mmのアプローチ/リトラクトが安全です。これらの動きはデフォルトのアプローチ/リトラクトより4倍長く、パーツとの衝突を避けるのに役立ちます。
メニューの下段では、パーツの向きを調整することもできます。
次のステップでは、パスセクションが実行される順番が正しいかどうかを、
注意:RoboDKでは、スペースバーを押し続けるか、メニューの
注:Program Events ボタンを使用して、スピンドルの回転などの I/O をアクティブまたは非アクティブにすることもできます。
ロボットプログラムを生成するには、正しいポストプロセッサを使用してください。
最後に、
これでFanuc LSおよび/またはTPファイルをロボットコントローラに転送する準備が整いました。