Robot Cutting
イントロダクション
この例では、Mastercam プラグインを使用して RoboDK を 5 軸ロボット加工に使用する方法をご紹介します。この例では、スピンドルに切削工具を取り付けたファナックのロボットを使用して、車のボンネット周りの余分な材料をトリミングすることを目的としています
ビデオ5軸切削アプリケーション用Mastercamによるロボットプログラミング
Mastercam用RoboDKプラグインを使用すると、MastercamからRoboDKへ直接ロボット加工プロジェクトを素早くセットアップできます。このプラグインにより、50以上の異なるロボットメーカーと500以上のロボットをプログラムすることができます。
Mastercam用RoboDKプラグインはNCI(Mastercamのネイティブ前処理ファイル)と標準APT CLSおよびGコードファイルをサポートしています。このプラグインはRoboDKのライセンスをお持ちであれば無料でご利用いただけます。
ヒントMastercam用RoboDKアドインについては、Mastercam用RoboDKアドインのセクションをご覧ください。
5軸ロボットによる切断
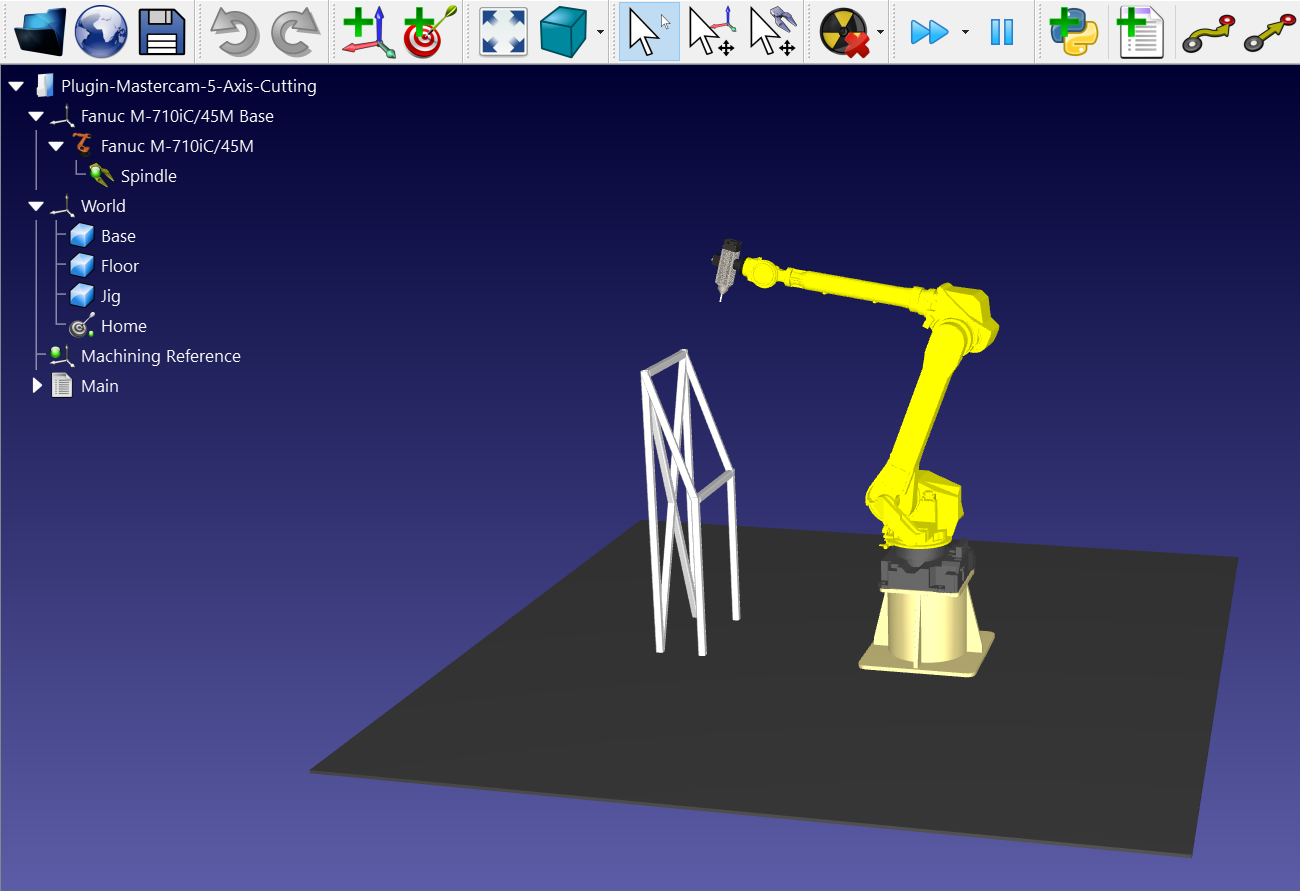
プロジェクトを開始するには、デフォルトライブラリにあるRoboDKの5軸切削サンプルを選択します。
RoboDKの設定
この例では、ファナックM-710iC/45Mロボット、スピンドルに取り付けられた切削ツール、車のボンネットを保持する治具を使用しています。
ヒント この、RoboDKでロボットステーションを作成する方法を順を追って学んでください。
ステーションをロードします:
1.File ➔
2.RoboDKのサンプルセクションから5軸切削のサンプルを探します:
C:/RoboDK/Examples/ Plugin-Mastercam-5-Axis-Cutting.rdk.
ステーションを読み込んだら、Mastercamを開き、プロジェクトC:/RoboDK/Other/Plugin-Mastercam/Examples/Car hood.mcamを読み込みます。
Mastercamでの切削ツールパス
Mastercamで3Dオブジェクトを開き、切削シミュレーションを起動します。ソフトウェアが切削面に合わせて工具の向きを調整しているのがわかります
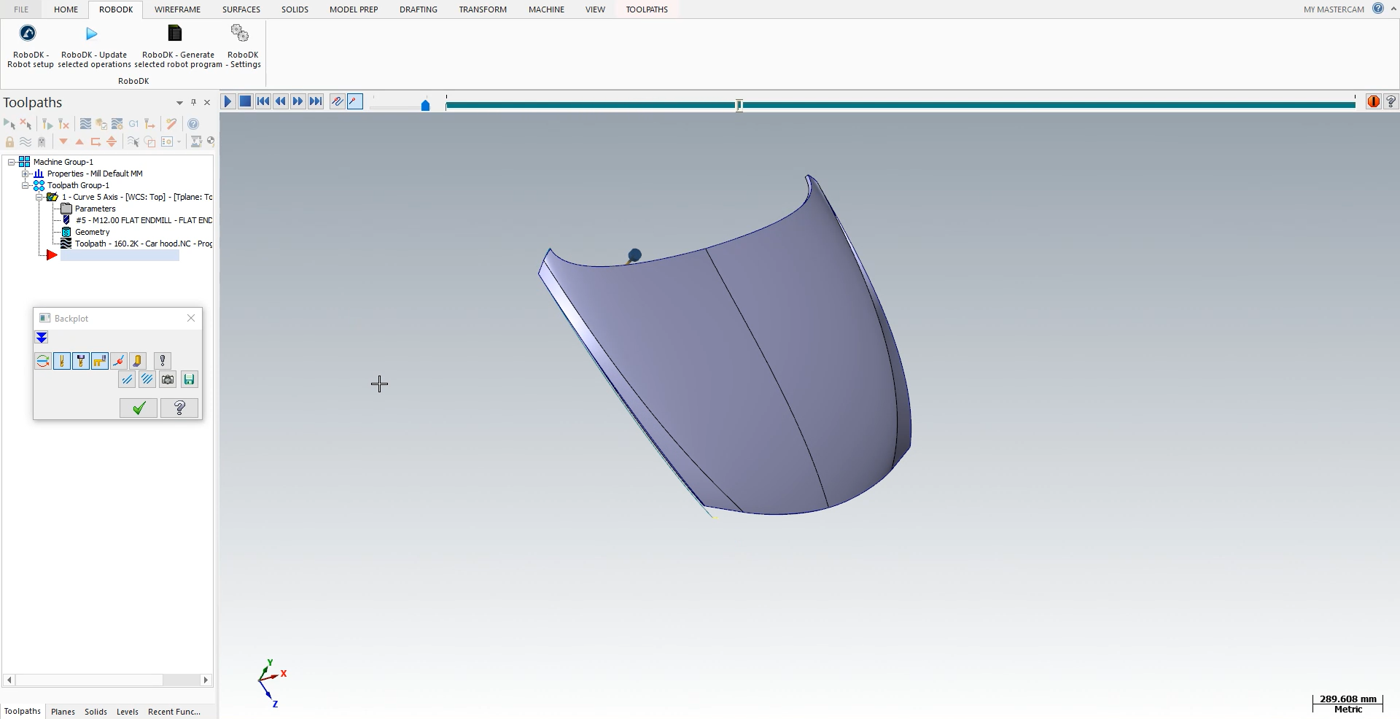
次の手順に従って、パーツをRoboDKにロードしてください:
1.RoboDKタブを選択し、RoboDK - Robot setupを選択します。
2.Load Partを選択します。
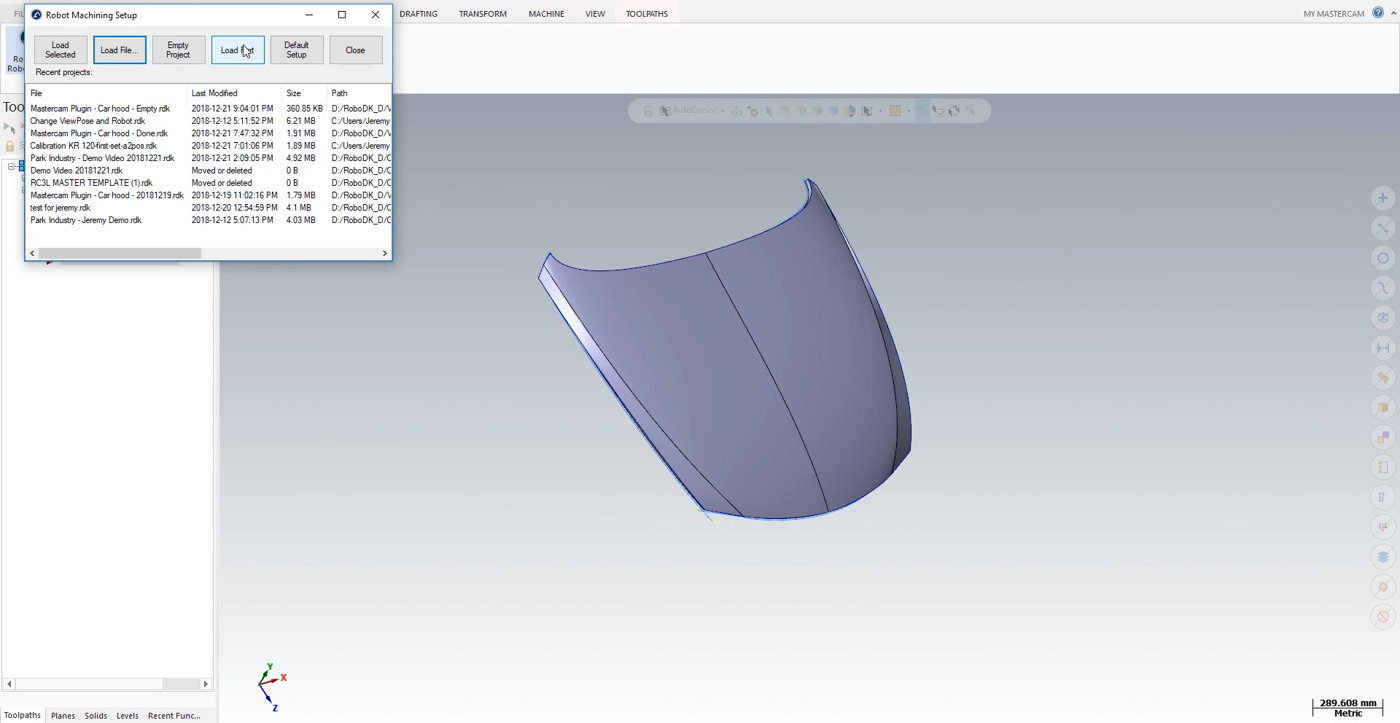
RoboDKステーションの治具上のアクティブリファレンスフレーム(加工リファレンス)にパーツがロードされているのが見えるはずです。
注意:パーツを正しい位置にインポートするには、Machining Referenceを特定の位置に設定する必要があります。Machining Reference➔ Visibleを右クリックしてフレームを表示します。パーツを作成する際、Mastercamでこの正確な位置に原点を設定します。パーツをインポートすると、RoboDKはパーツの原点と加工基準の原点を一致させます。
次のステップは、MastercamからRoboDKにカッティングパスをインポートすることです。
1.MastercamのRoboDKタブを選択します。
2.RoboDKを選択- 選択した操作を更新します。
3.RoboDKへ。
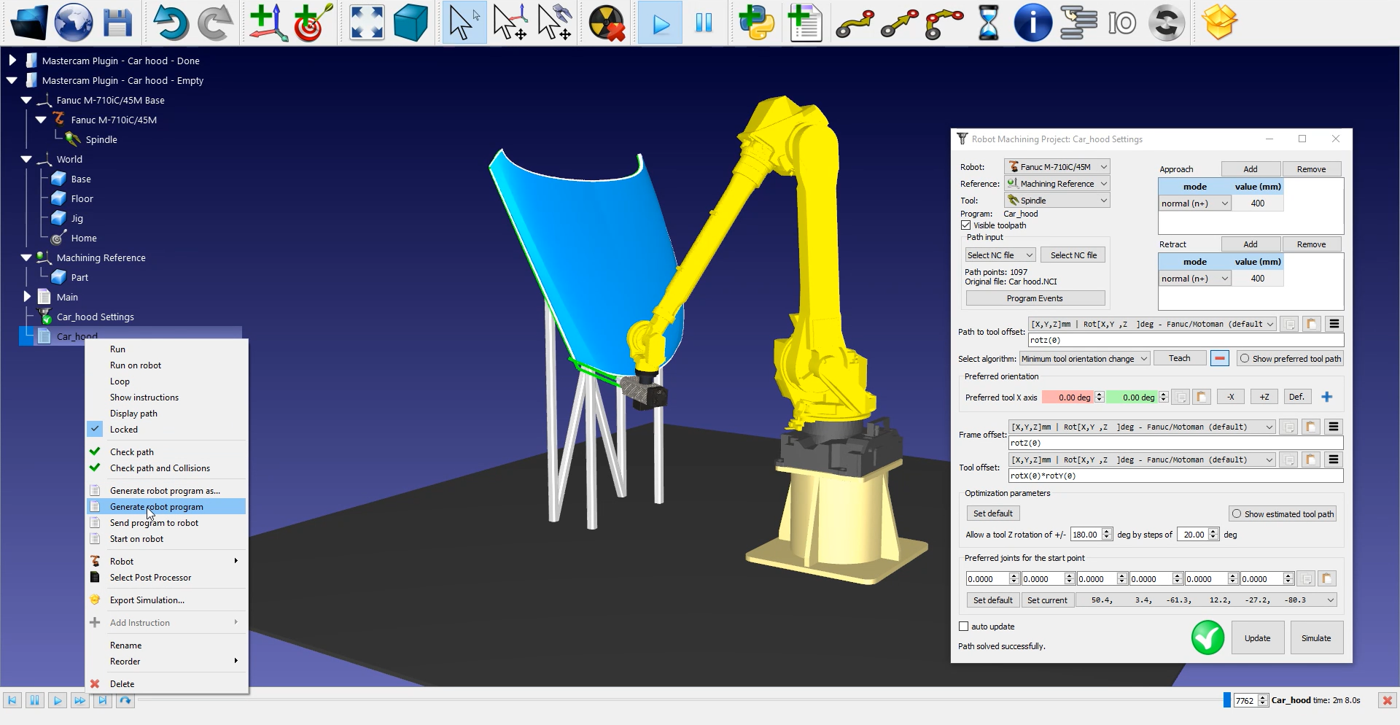
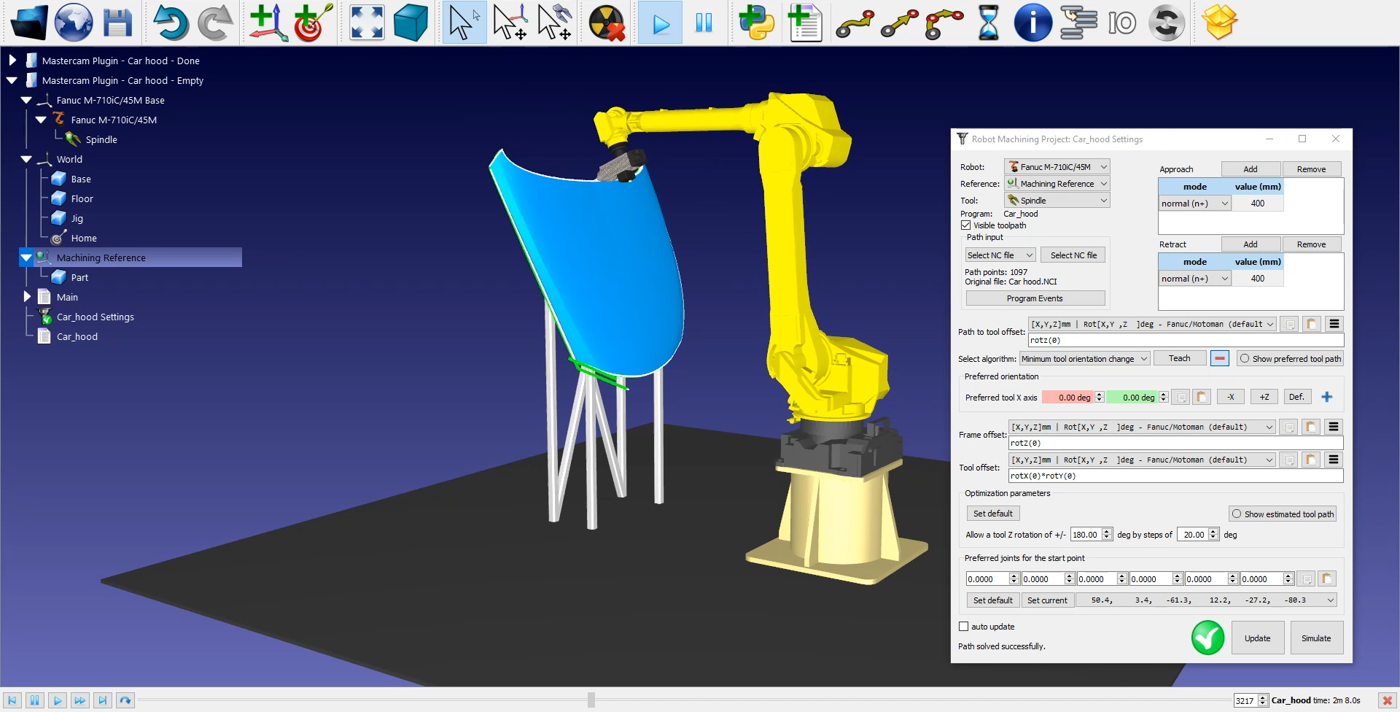
RoboDKでのロボット切断
ロボットのカッティングパスがRoboDKにインポートされると、RoboDKステーションのモールドリファレンスにカッティングツールパスがアタッチされているはずです。
また、カッティングパスの前後でアプローチとリトラクトの動作の値を調整することもできます。この例では400mmのアプローチ/リトラクトが安全です。これらの動きはデフォルトのアプローチ/リトラクトより4倍長く、パーツとの衝突を避けるのに役立ちます。
メニューの下段では、パーツの向きを調整することもできます。
次のステップでは、パスセクションが実行される順番が正しいかどうかを、
注意:RoboDKでは、スペースバーを押し続けるか、メニューの
注:Program Events ボタンを使用して、スピンドルの回転などの I/O をアクティブまたは非アクティブにすることもできます。
ロボットプログラムを生成するには、正しいポストプロセッサを使用してください。
最後に、
これでFanuc LSおよび/またはTPファイルをロボットコントローラに転送する準備が整いました。