ロボットを選択
このセクションでは、新しいセルを作成する方法を示します。
以下の手順に従って、ロボット加工用の新しいロボットセルを構築することができます。
1.File➔ New Station を選択します。
2.ファイル➔ オンラインライブラリを開く を選択すると、ライブラリにアクセスできます。
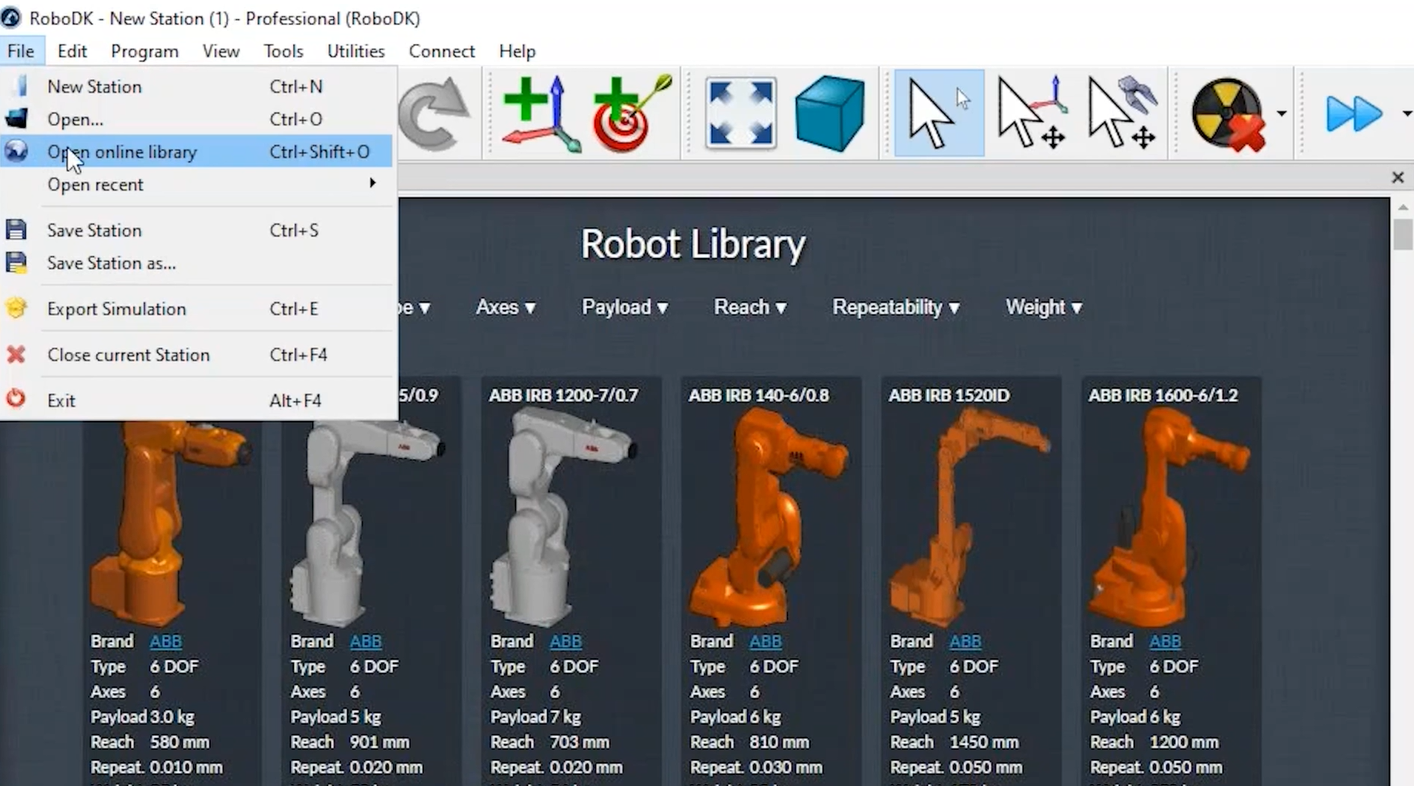
3.ロボットを見つけたら、Downloadを選択してプロジェクトでロボットを開きます。
注:各ロボットには座標系としてロボットベースがロードされます。
ヒント: STEP、IGES、STL などの 3D モデルを読み込むこともできます。新しいファイルを開くには、ファイルを RoboDK にドラッグ&ドロップするか、ファイル➔ 開く を選択してください。RoboDK プロジェクトを作成するためのヒントについては、RoboDK を始めるにあたってをご覧ください。
ヒントロボット加工プロジェクトを作成したら、ロボットを右クリックし、ロボットの置き換えを選択することで、簡単にロボットを置き換えることができます。その後、ライブラリにあるロボットを選択できます。この方法は、セル全体を再構築し、再度リンクを確立するよりも簡単です。