ロボット加工座標系の作成
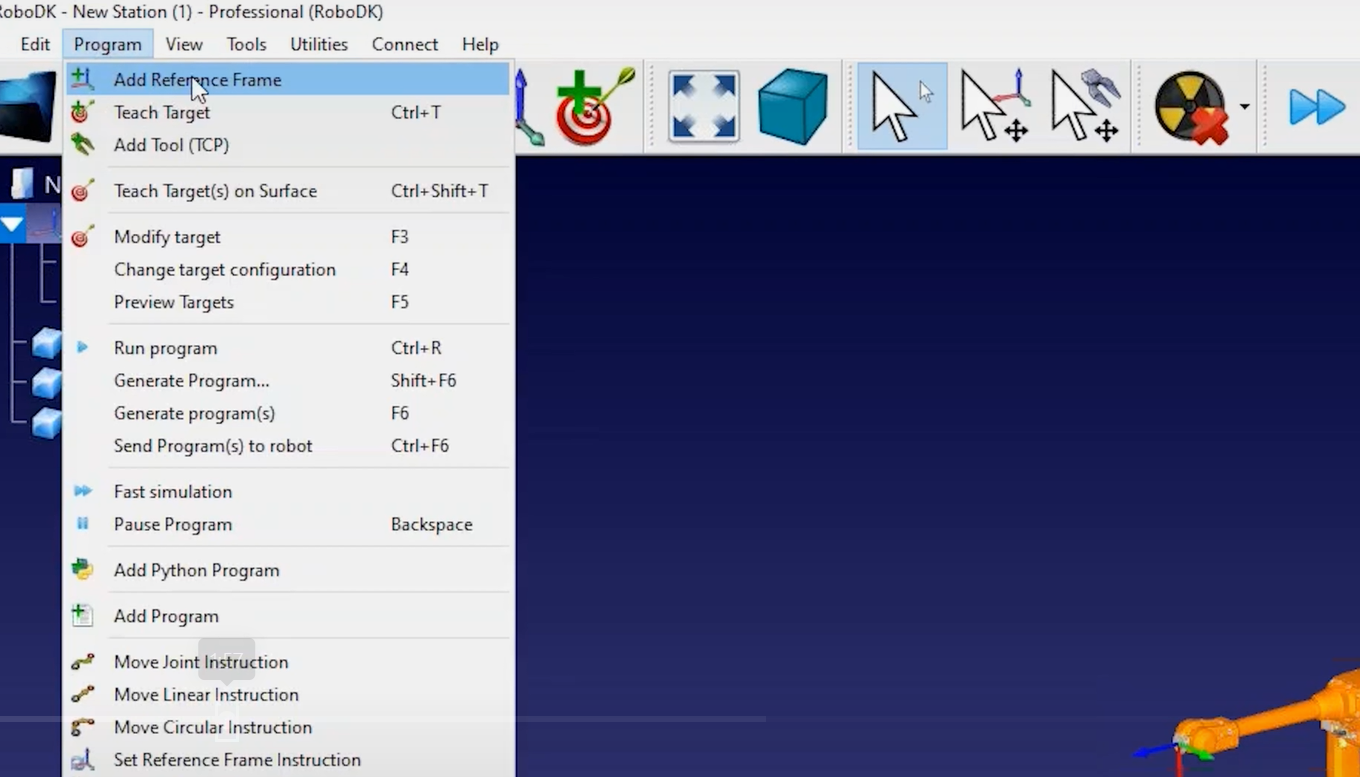
Program(プログラム)メニューからAdd Reference Frame(参照フレームの追加)を選択して、ロボット加工フィクスチャの新しい座標系を作成することができます。
ヒント: ツールバーの対応するボタンを選択して、新しい参照フレームを追加することもできます。
注意:ロードしたオブジェクトをツリー内にドラッグ&ドロップすることで、新しい座標系にアタッチして配置することができます。
ヒント: ツールの 3D モデルを読み込んでおけば、ツリー内のロボットにオブジェクトをドラッグ&ドロップするだけで、RoboDK が自動的にツールに変換します。詳しくはスタートガイドをご覧ください。
ヒント: 必要であれば、ツールをダブルクリックし、さらにオプションを選択してジオメトリを移動できます。
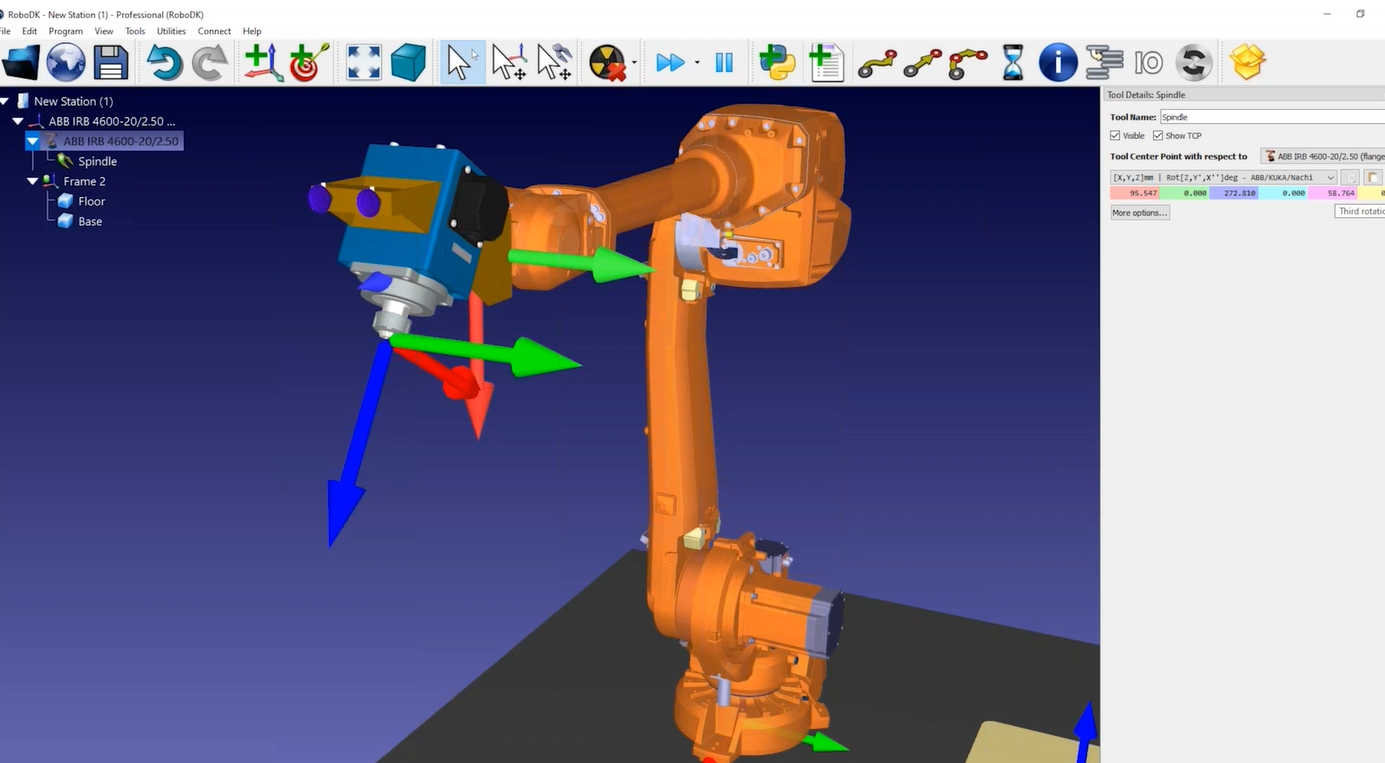
以下の手順に従って、ツール(TCP)を正しく定義してください:
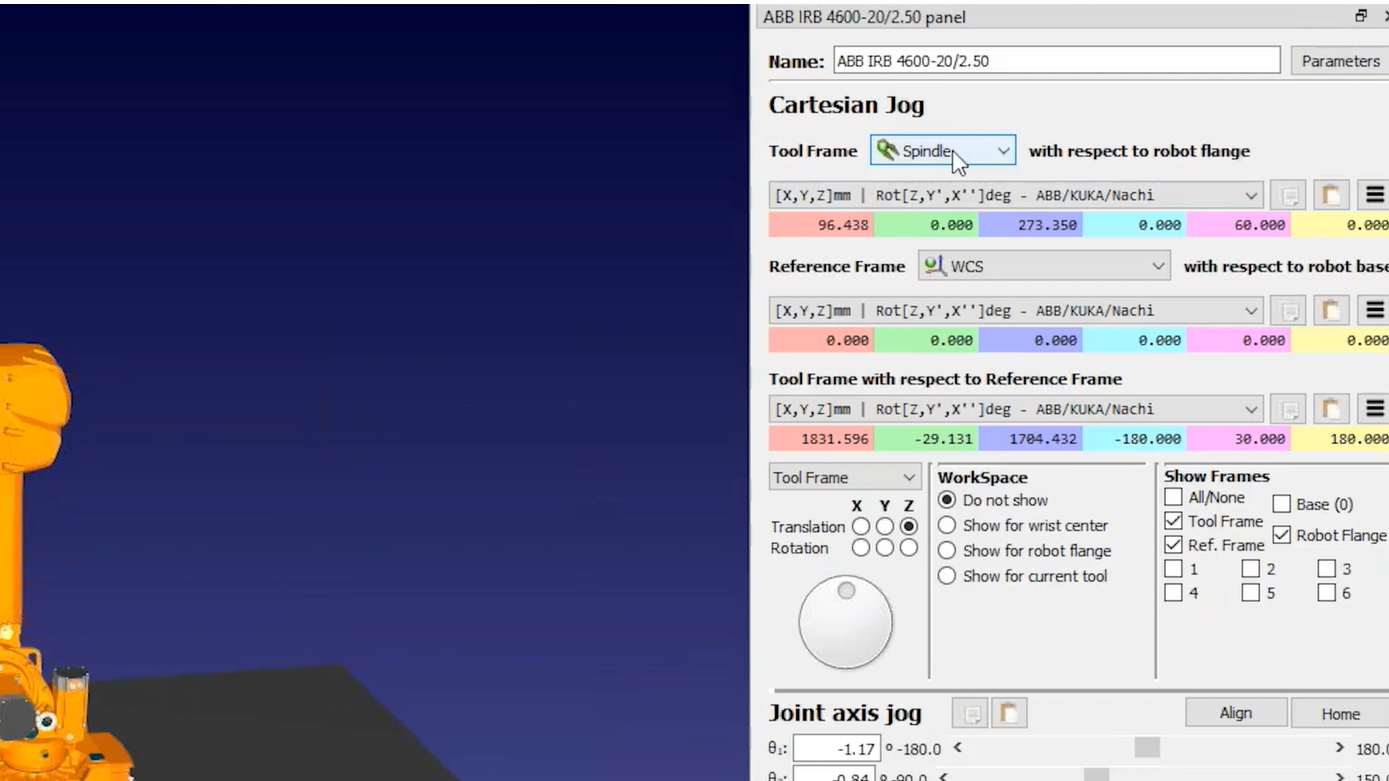
1.ツールの座標があれば、それを入力することができます(ツールのポーズを入力するために、さまざまなベンダー固有の方向フォーマットから選択できます)。
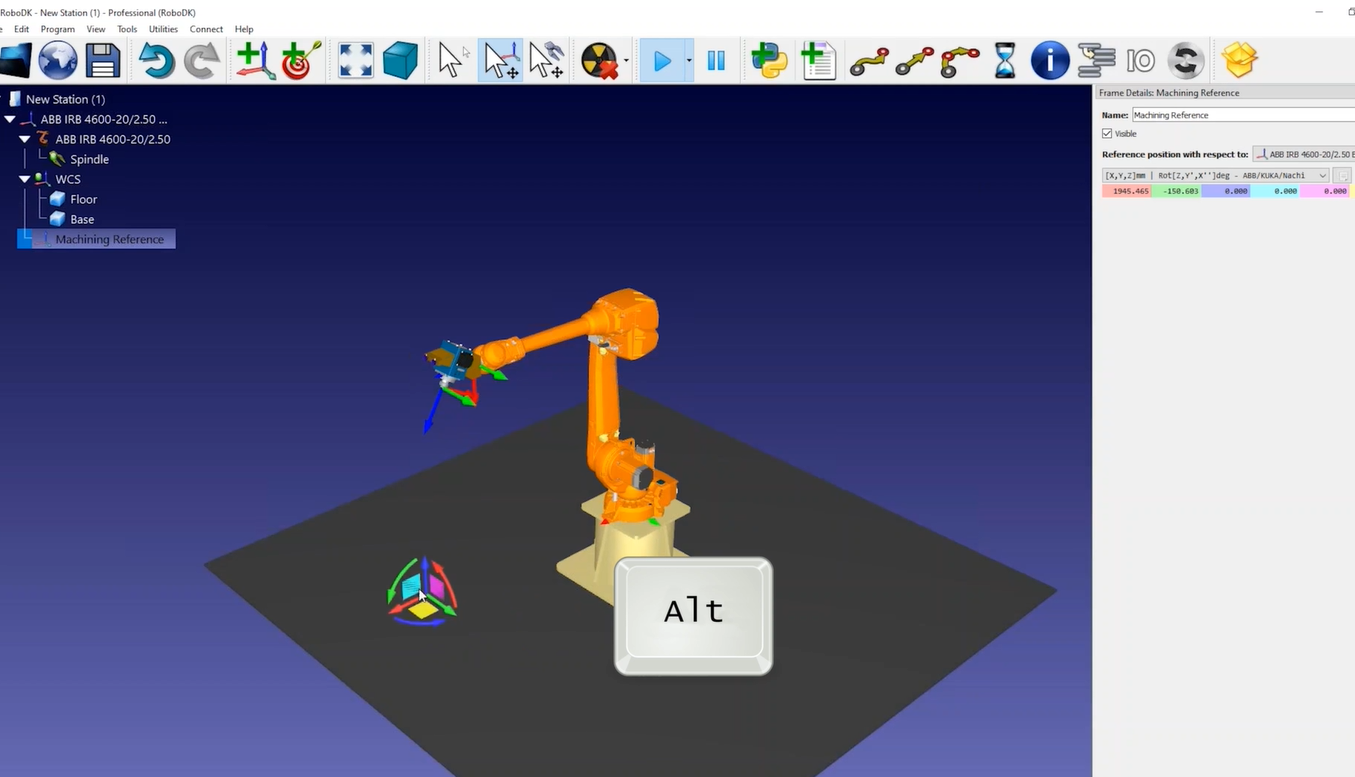
2.ALTキーを押しながら、ロボットや任意の座標系を動かすことができます。
3.ALTキーとShiftキーを押しながら、TCPの位置と向きを変更できます。
注:座標系についても同様の手順が踏めます。ワールド座標系を表す座標系があれば、それをダブルクリックして座標を0にするか、単に右クリックしてリセットを選択します。
以下の手順に従って、加工参照を表す別の座標系を追加します:
4.Program メニューからAdd Reference Frame を選択します。
5.F2キーを押すか、右クリックして「名前の変更」を選択すると、ツリー内のアイテムの名前を変更できます。
6.パーツを配置する場所を選択する機会があれば、ALTキーを押しながら座標系を好きな場所に移動できます
7.ロボットをダブルクリックすると、使用しているツールと座標系を確認できます。ロボットのある位置について、ロボットパネルに表示される値は、ロボットコントローラに表示される値と同じでなければなりません。
以下の手順に従ってロボットセルを保存してください:
8.ロボットセルを作成したら、File➔ Save Station を選択して1つのRDKファイルとして保存することができます。これで3Dモデルを含むすべての設定が1つのファイルとして保存されます。
9.RoboDKに加工ジョブファイルを読み込むと、RoboDKは自動的に加工ごとに1つのロボット加工プロジェクトを作成します。
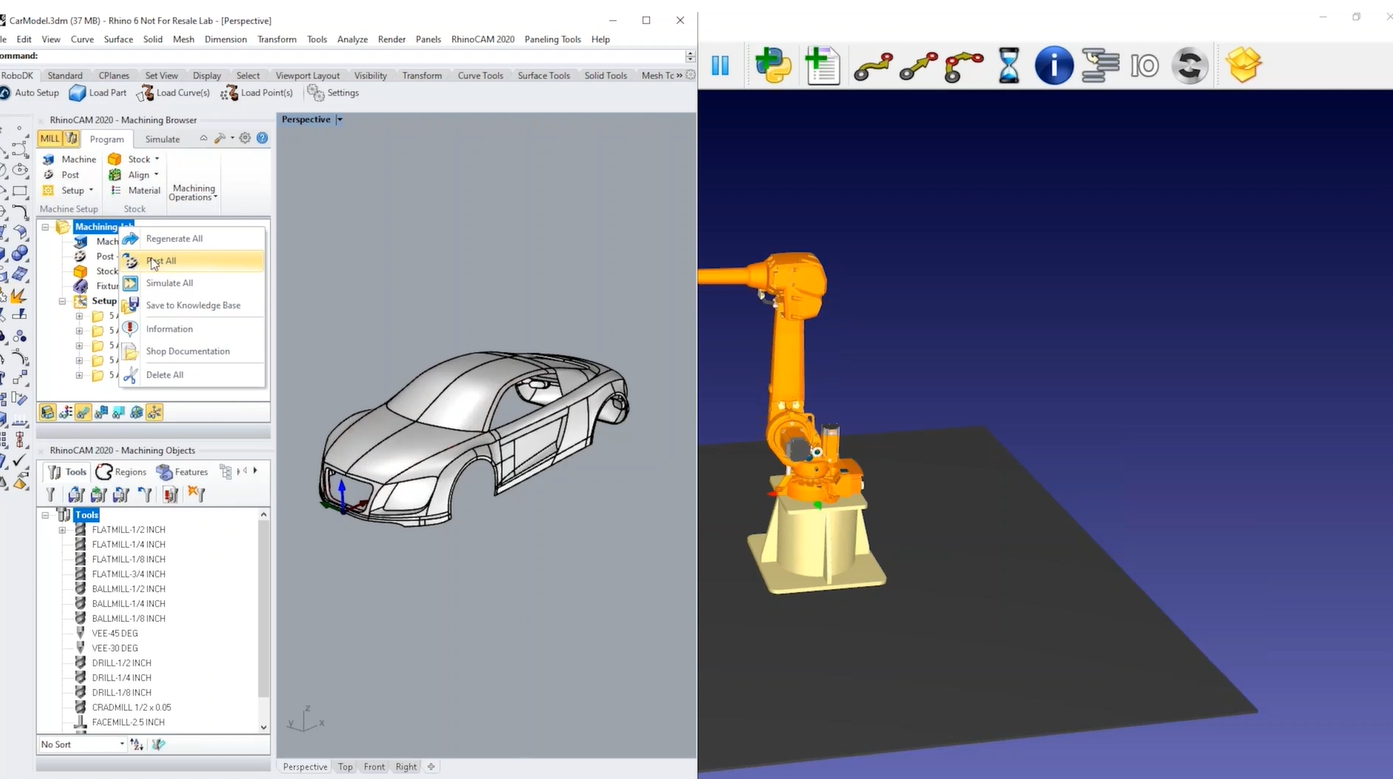
10.更新] を選択すると、RoboDK がデフォルトの設定で実行可能なパスを見つけられるかどうかを確認できます。すべての操作を一括して更新することもできます。
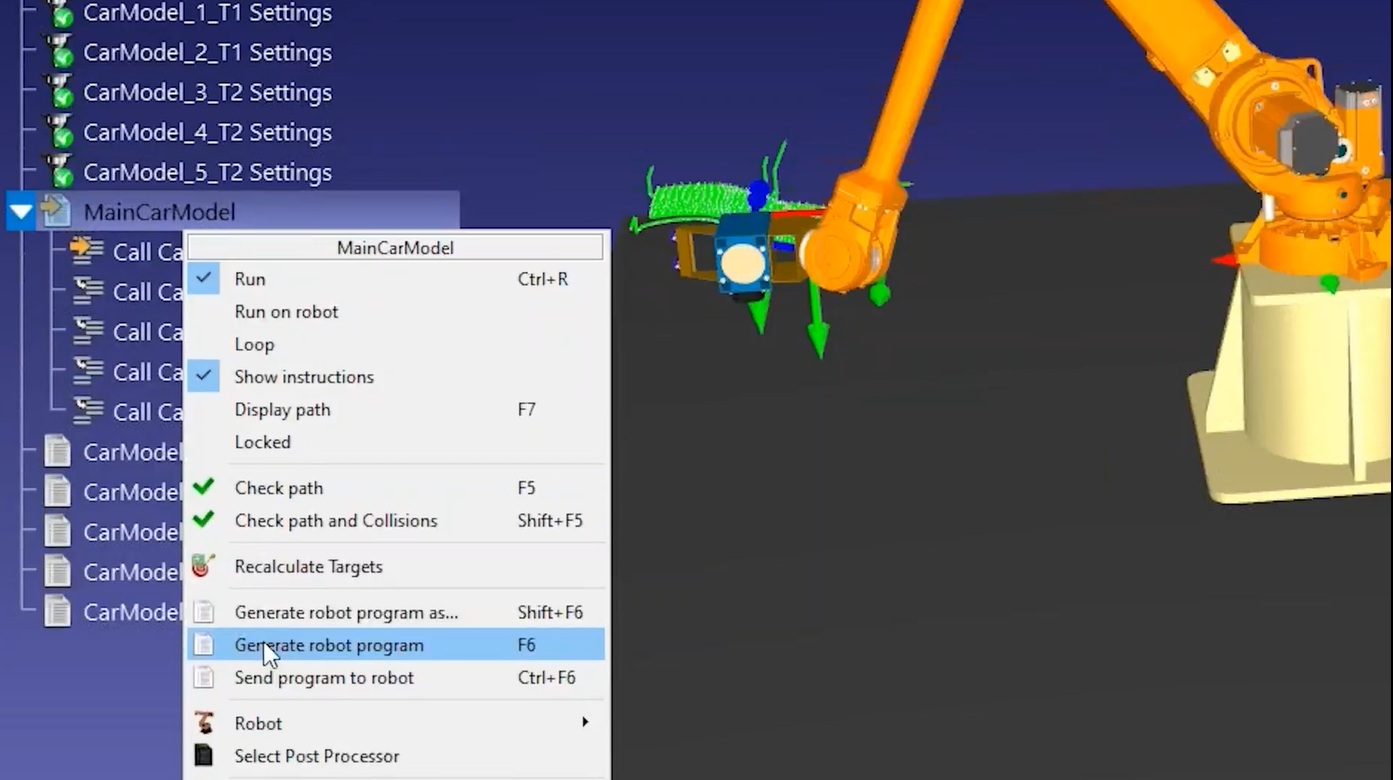
11.RoboDKで有効なシミュレーションができたら、プログラムを右クリックしてプログラムの生成を選択します。これでロボットコントローラに必要なファイルが生成されます。