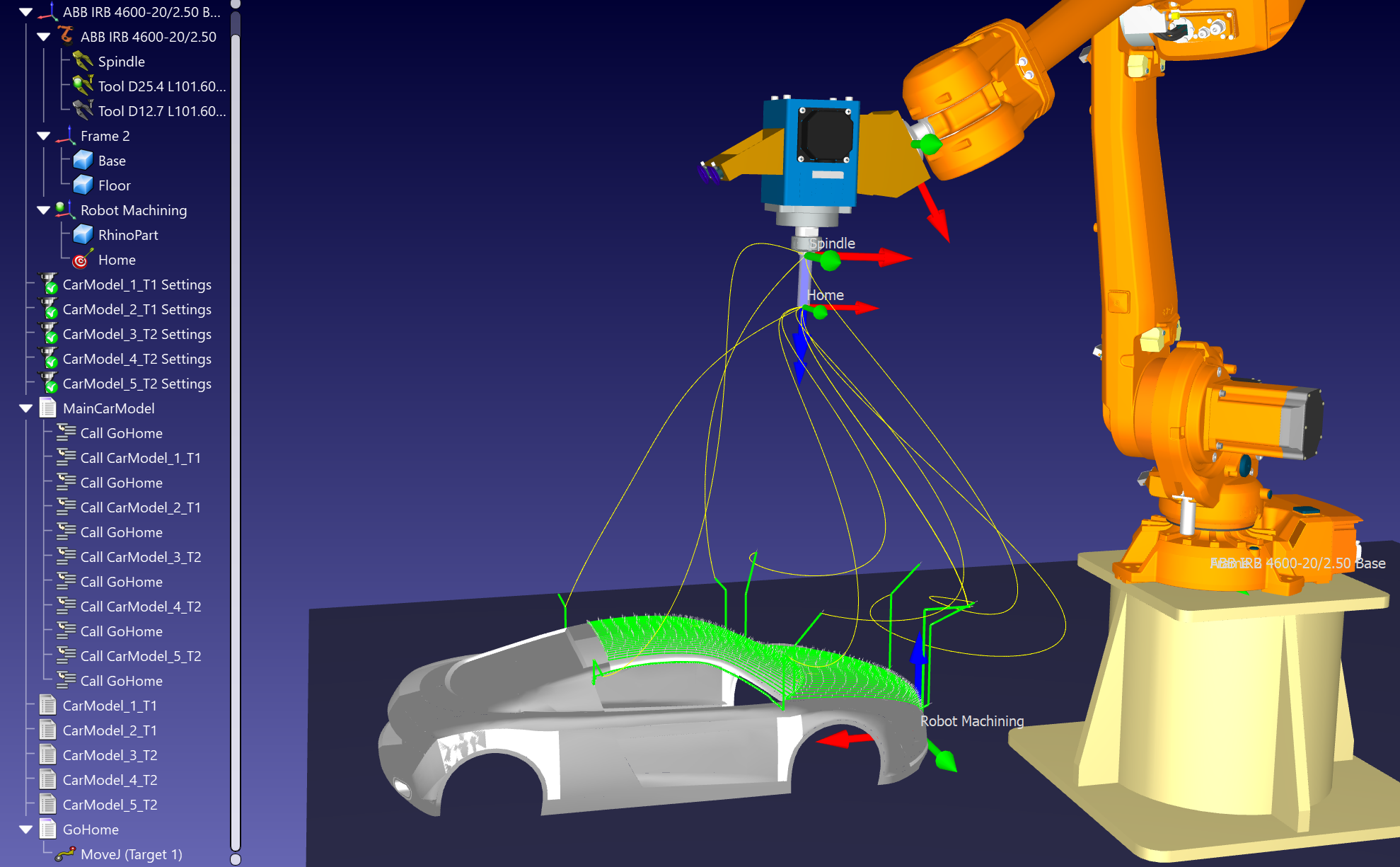
ロボット加工ジョブ間の安全な移行
ロボットの加工作業をより安全に移行するために、各加工作業の後にロボットをアプローチポジションに移動させることができます。
以下の手順に従って、GoHomeという新しいプログラムを作成し、加工ジョブの完了後にこの場所に移動します:
1.Program➔ Add-in Program を選択するか、ツールバーの対応するボタンを選択して、新しいプログラムを作成します。
2.F2を押してプログラム名をGoHomeのように変更してください。
3.先ほど作成したプログラムを選択します。
4.ロボットを安全な場所に移動し、Program➔ Move Joint Instruction を選択するか、ツールバーの対応するボタンを選択します。この操作により、その場所に新しいターゲットが作成され、プログラムが以前に選択されていた場合は、そのターゲットに関節移動命令が追加されるはずです。
ヒントターゲットとプログラムの作成方法については、「はじめに」をご覧ください。
5.最初のプログラム呼び出し命令を右クリックし、Add-in 命令➔ プログラム呼び出し命令を選択することで、各加工の間にロボットをこのホームターゲットに移動させることができます。
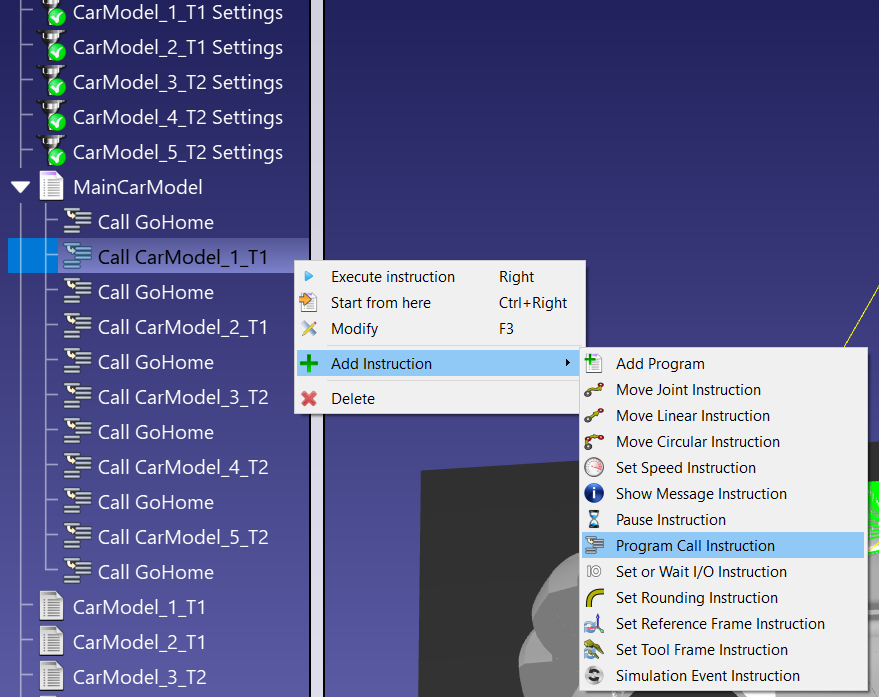
6.移動するプログラム名(GoHome)を入力し、OKを選択します。
ヒント: 命令を追加できない場合は、必ずEscapeを選択してプログラムのシミュレーションを停止してください。
7.この命令をプログラム内でコピー・ペーストすることで、最終的な結果を素早く得ることができます。
8.メインプログラムを右クリックし、パスの表示を選択すると、ロボットのツールパスが黄色い線で表示されます。これにより、アプローチターゲットの位置がプロジェクトに適しているかどうかを視覚化することができます。