ツールの向きをカスタマイズ
ロボット加工プログラムに沿って、好みの向きをティーチングすることで、ツールの向きを簡単にカスタマイズできます。
この例では、最後の2つの加工で工具の向きを改善することができます:
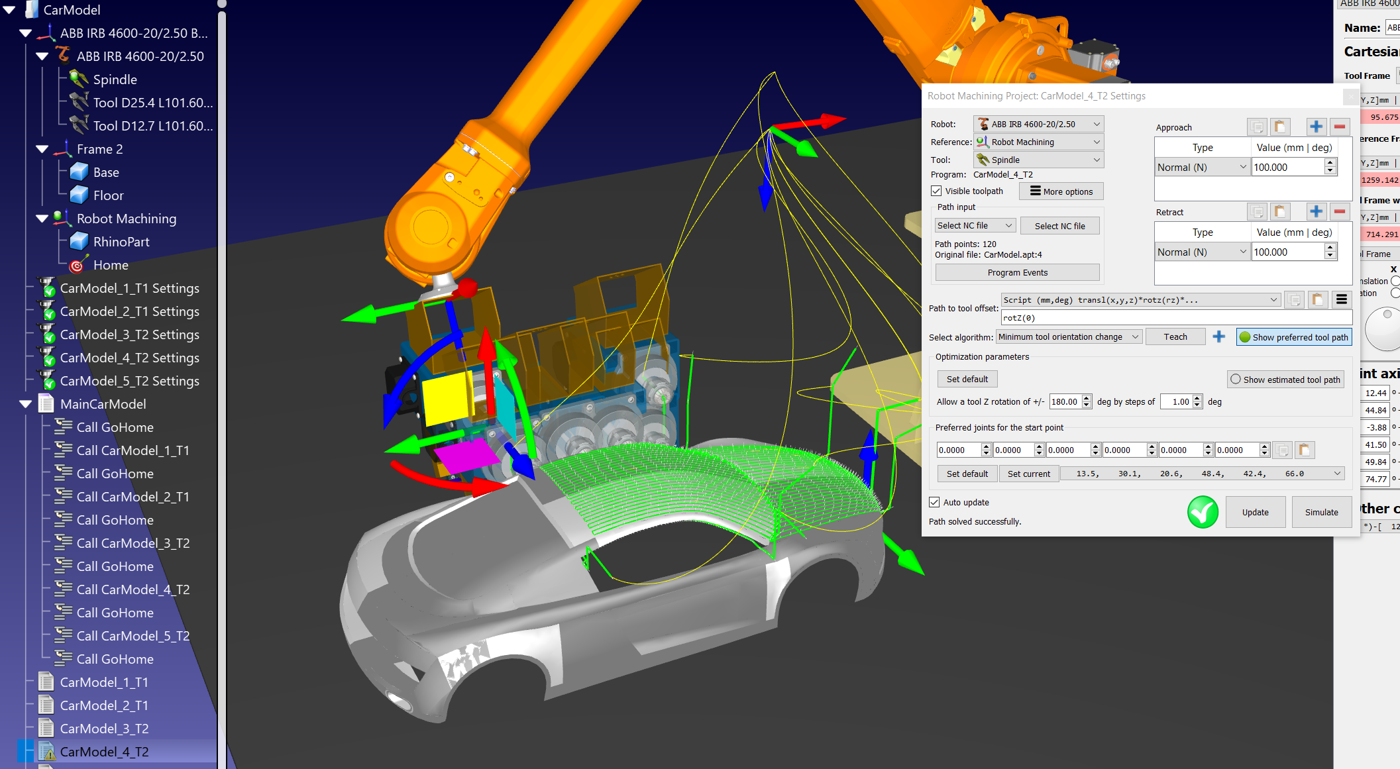
1.ロボット加工設定を開くには、4番目の加工をダブルクリックします。
2.シミュレートを選択するか、対応するプログラムを実行し、加工パスのある点でロボットを停止させます。
3.Show preferred tool path ボタンを選択すると、RoboDKがロボットを追従させようとするツールの向きが表示されます。
4.Altキーを押しながらロボットツールをつかみ、青い丸い矢印をつかんでツールのZ軸を中心に回転させます。ツールの向きを追いかけたい向きに移動します。
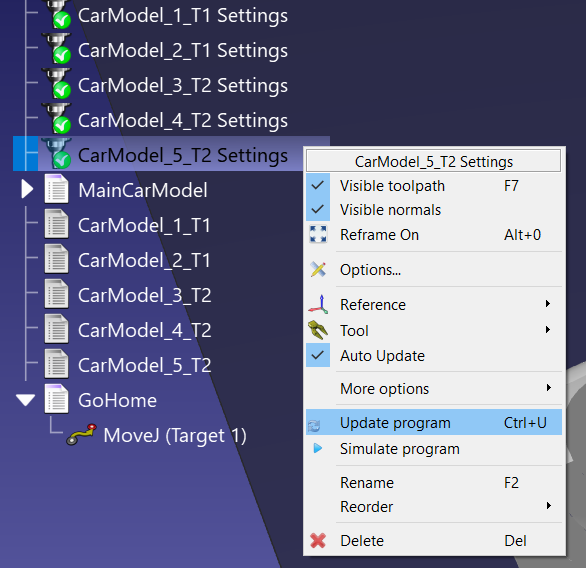
5.ロボット加工メニューでティーチを選択すると、パスに沿ってその向きを考慮することができます。Teachを選択することで、RoboDKに現在のツールの向きに従うよう指示し、その向きに合わせて設定が調整されます。
6.Updateを選択してパスを再計算します。
シミュレーションを実行するにはSimulateを選択します(または生成されたプログラムをダブルクリックします)。
7.期待通りの結果が得られたら、設定をコピーして別のツールパスに貼り付けることができます:ロボット加工設定を右クリックし、コピー設定を選択します。次に、新しいロボット加工設定を右クリックし、設定の貼り付けを選択します。この最後のロボット加工プロジェクトをもう一度右クリックし、プログラムの更新を選択して、このロボット加工ジョブに関連するプログラムを更新します。